Download as PDF, PPTX
![Scene Understanding Networks for Autonomous
Driving based on Around View Monitoring System
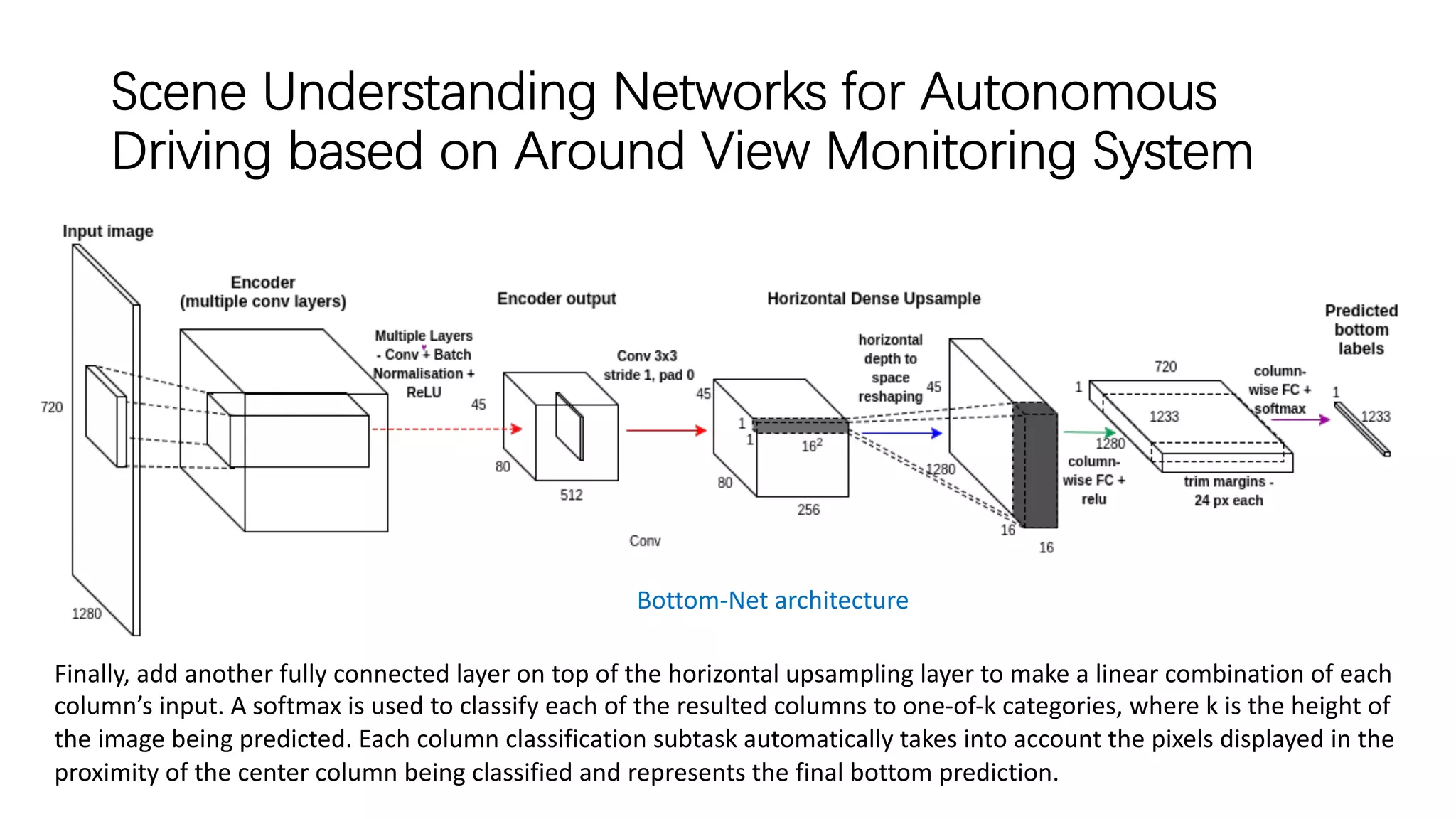
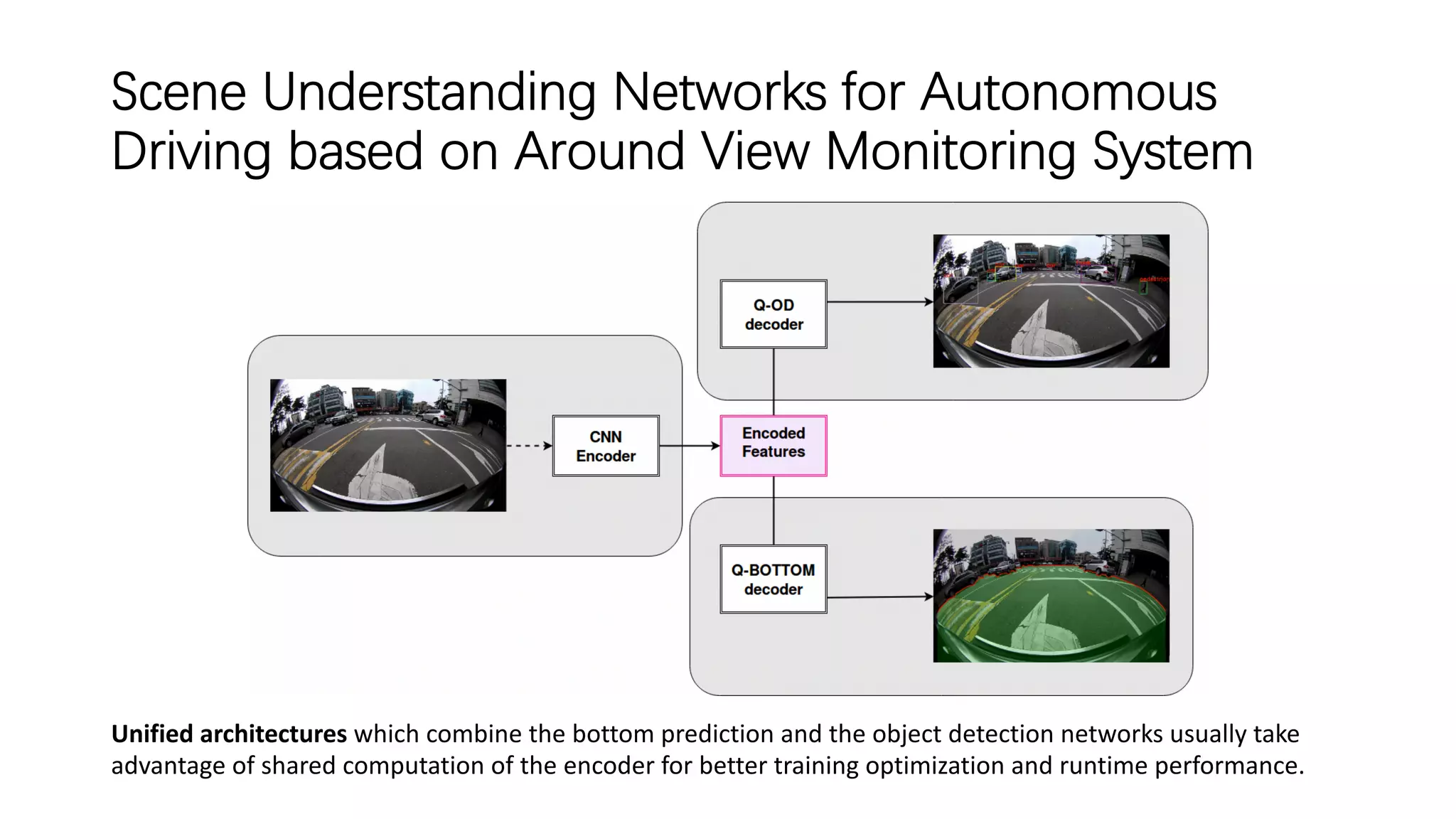
Bottom prediction architecture using ROI pooling for each column
Use a single shot method for the final classification layer of the bottom prediction task. Moreover,
to make the network more efficient, replace the decoder part of the network corresponding to the
multiple upsample layers with a single dense horizontal upsampling layer. The resulting feature
map generated from the encoder after applying multiple convolutions with stride > 1 has a
resolution of [width/16, height/16], being reduced 16 times the original image size.](https://image.slidesharecdn.com/fisheyepanoram-191023022418/75/Fisheye-Omnidirectional-View-in-Autonomous-Driving-20-2048.jpg)

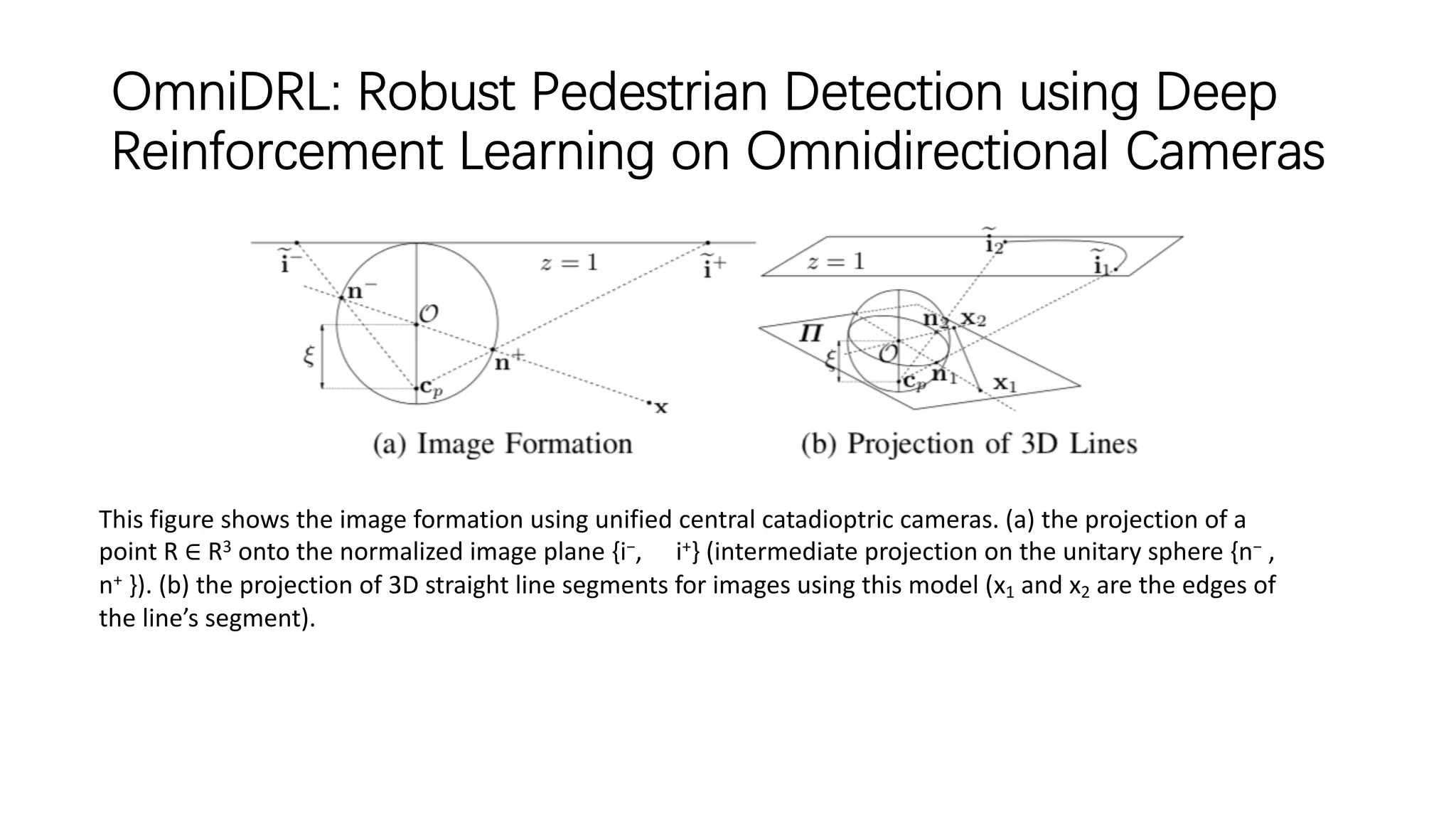




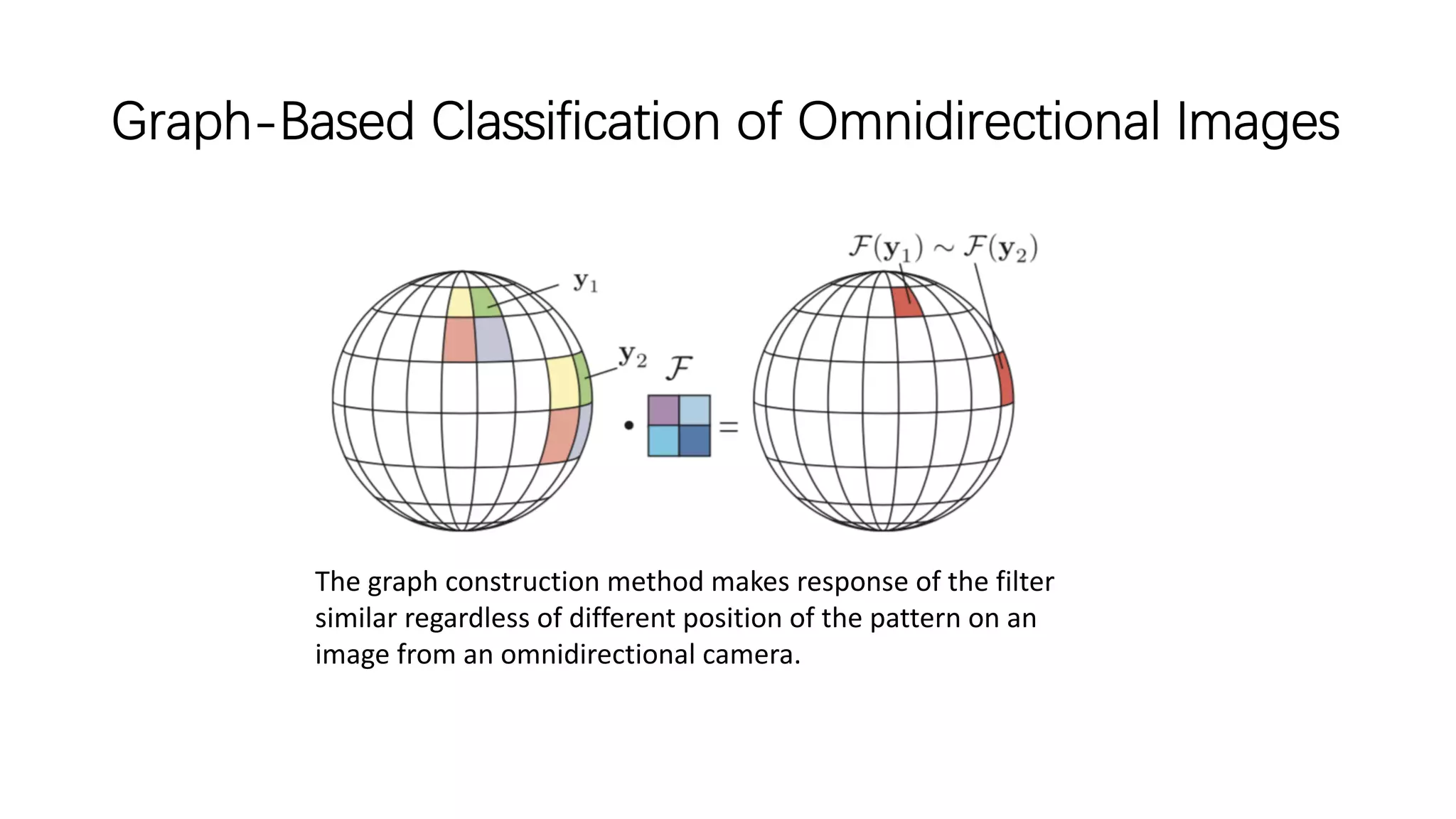
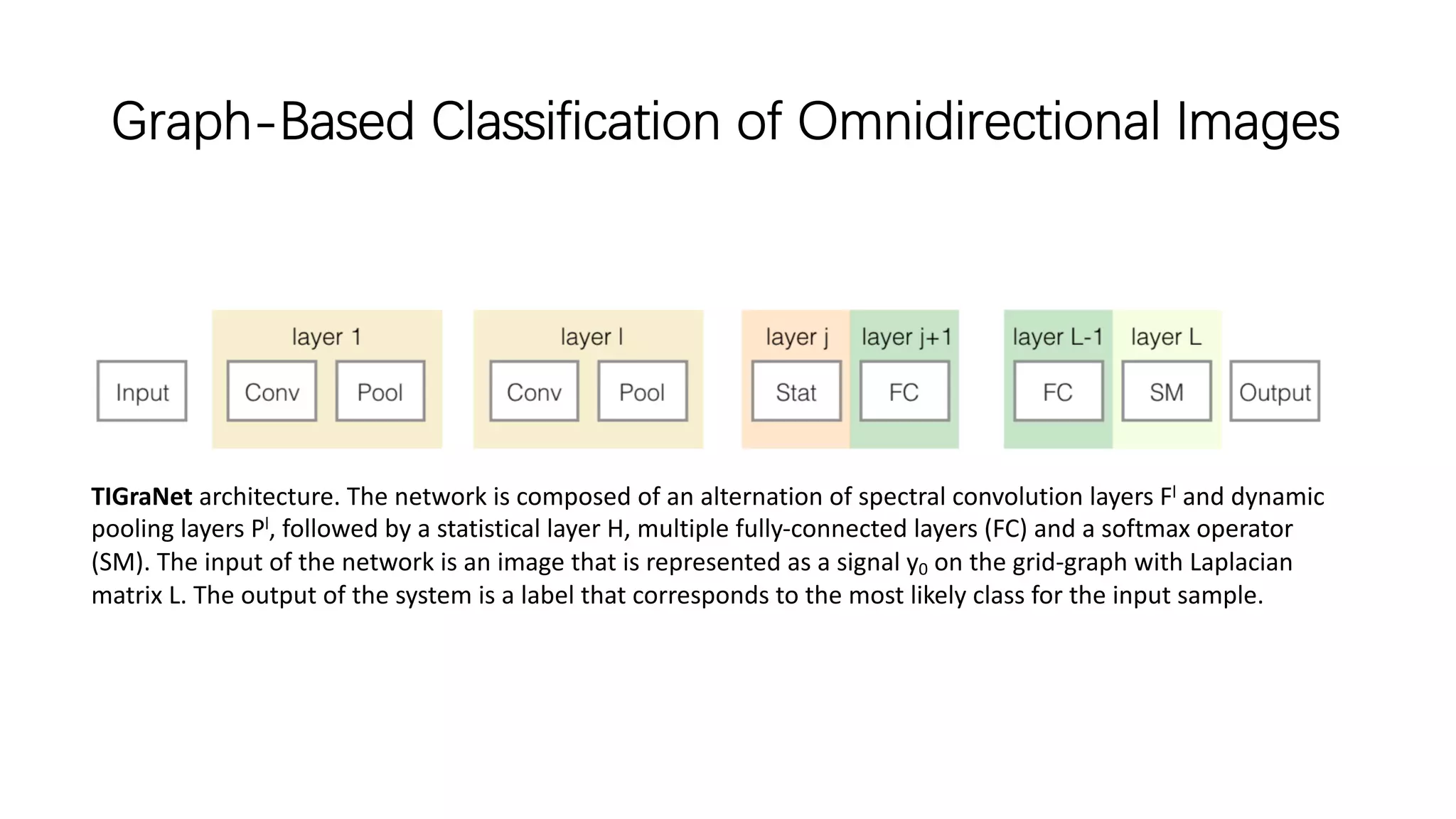
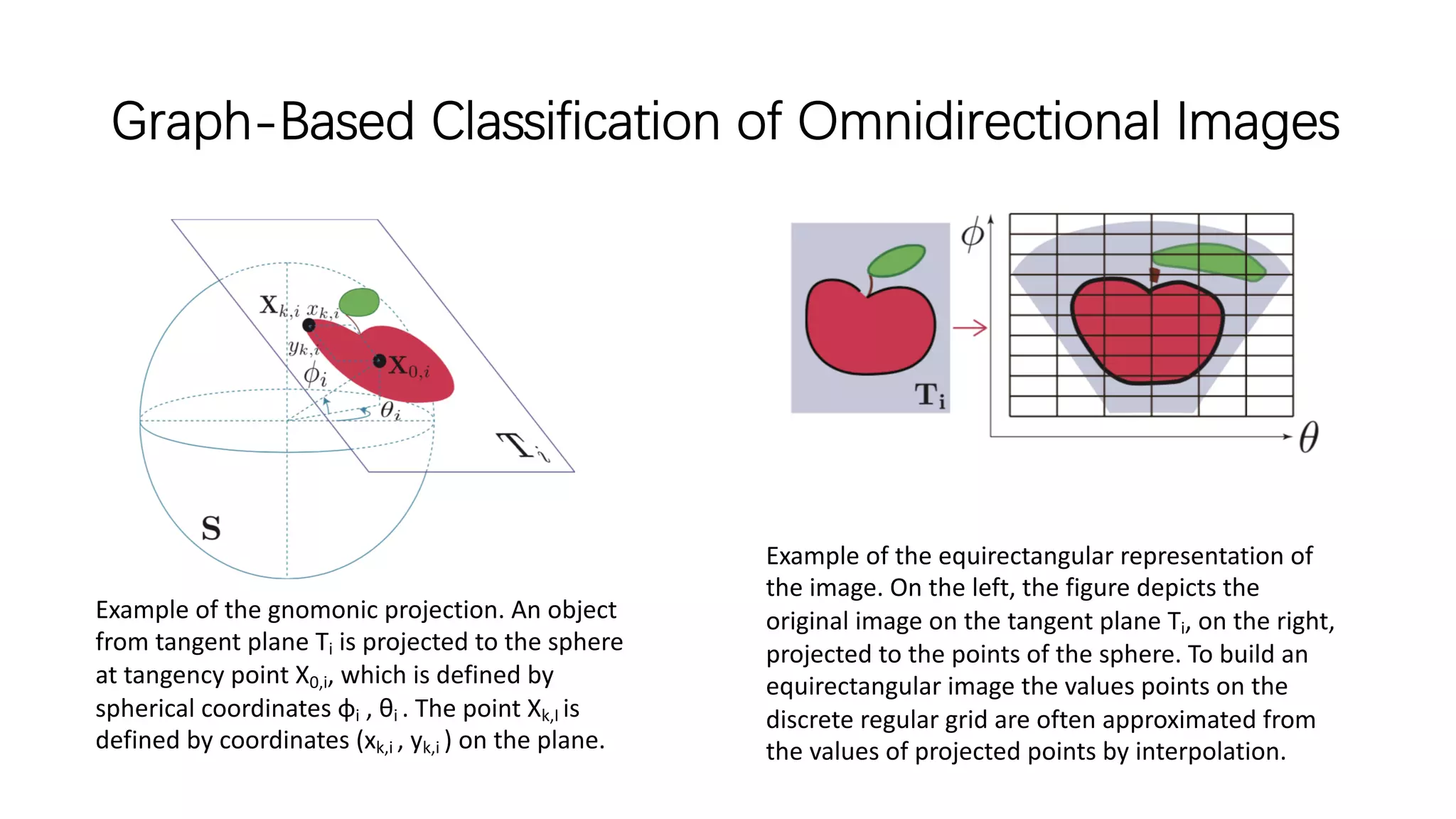
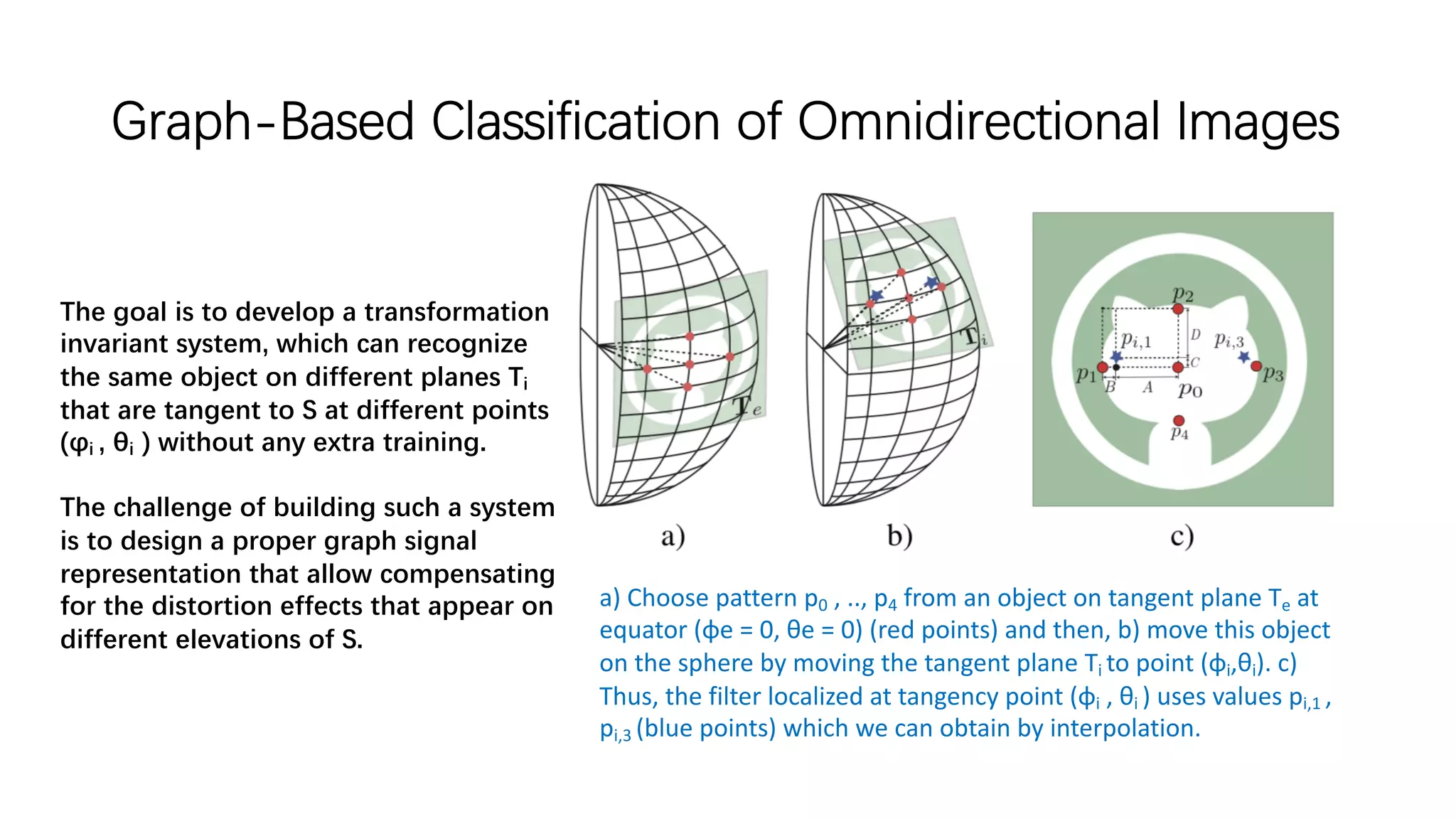
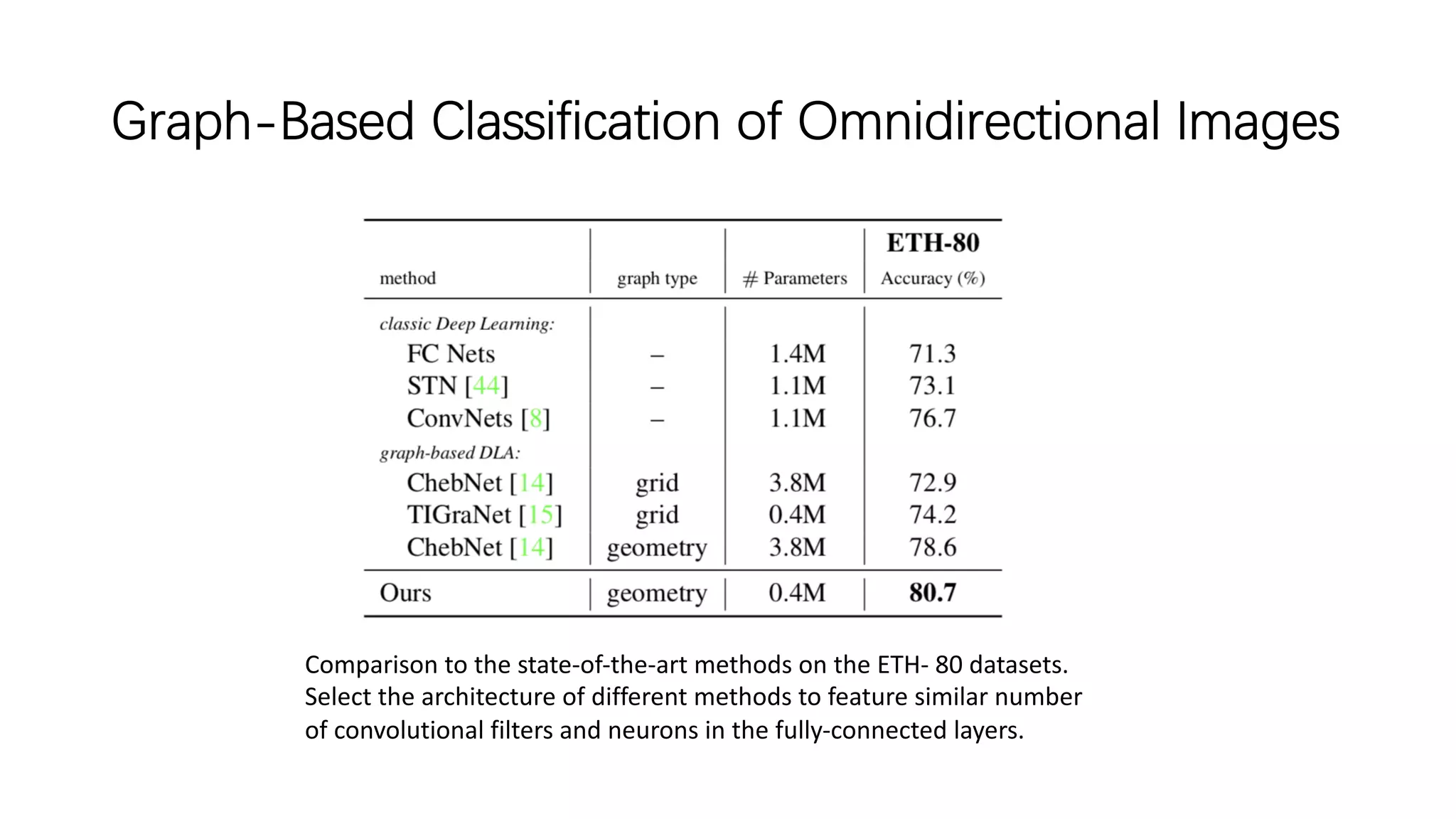
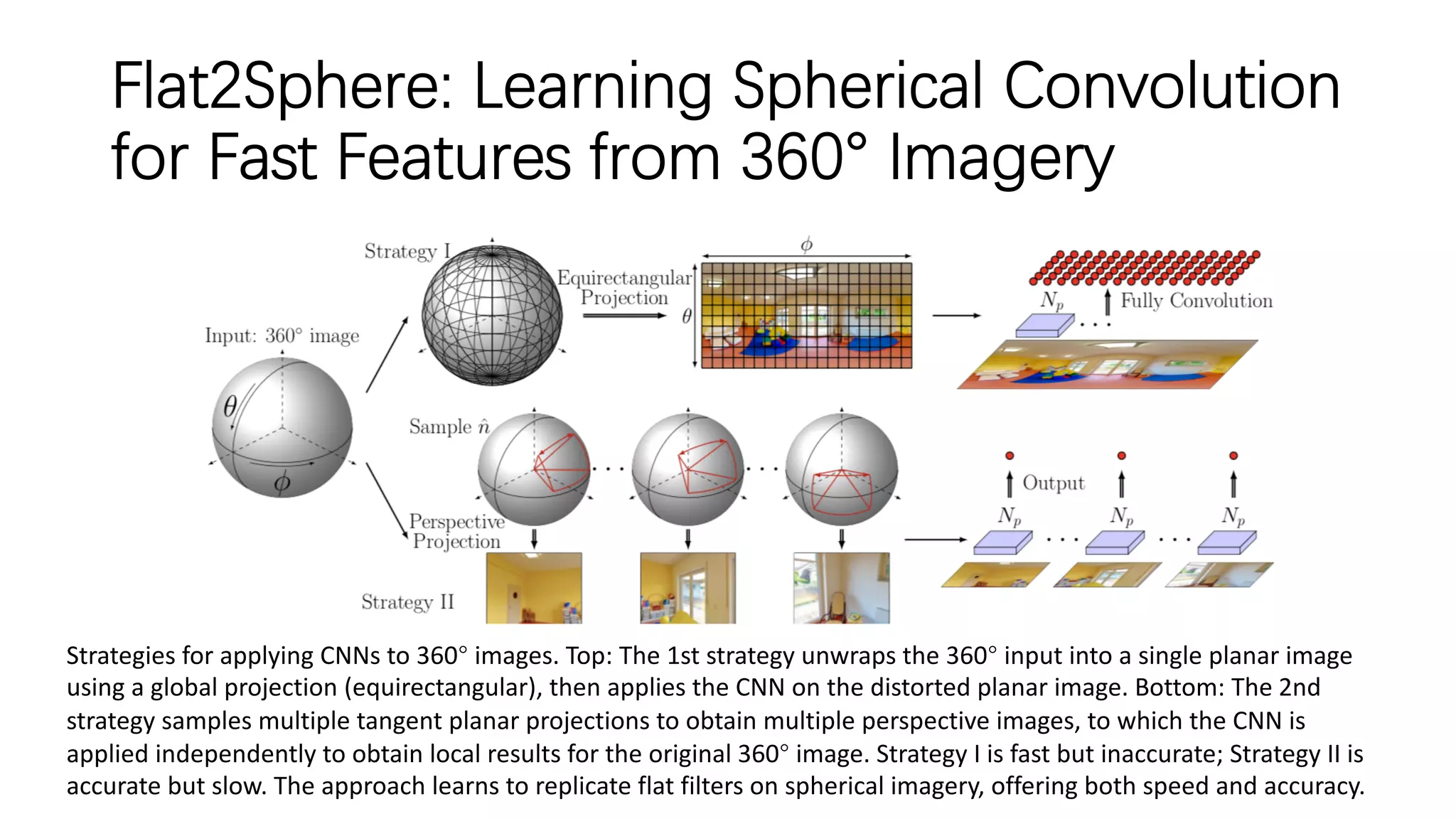
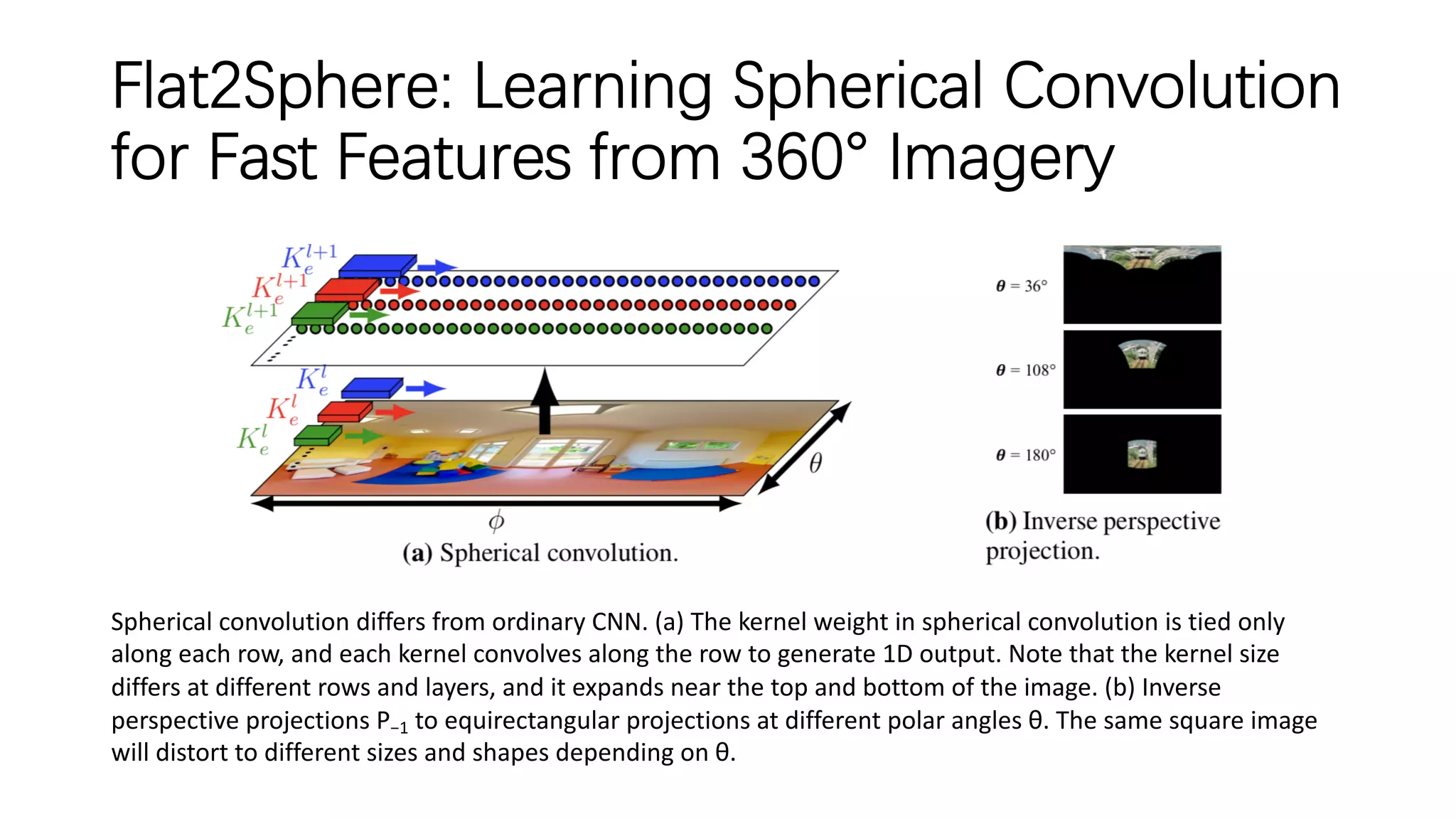
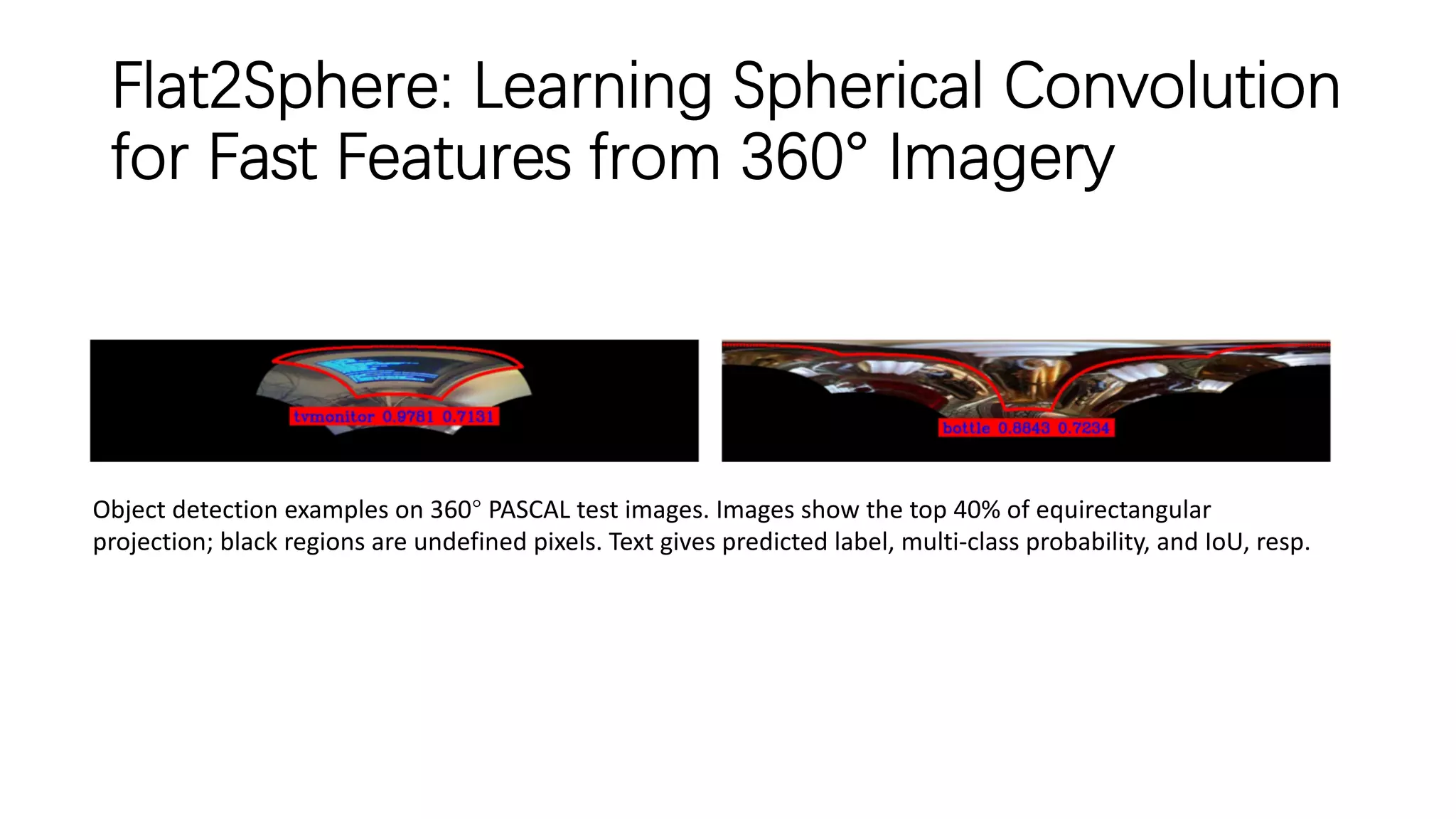
This document discusses several papers related to using omnidirectional/fisheye camera views for autonomous driving applications. The papers propose methods for tasks like image classification, object detection, scene understanding from 360 degree camera data. Specific approaches discussed include graph-based classification of omnidirectional images, learning spherical convolutions for 360 degree imagery, spherical CNNs, and networks for scene understanding and 3D object detection using around view monitoring camera systems.






![[DL輪読会]VoxelPose: Towards Multi-Camera 3D Human Pose Estimation in Wild Envir...](https://cdn.slidesharecdn.com/ss_thumbnails/20201023voxelposekuboshizuma-201023025841-thumbnail.jpg?width=640&height=640&fit=bounds)




![[PR12] You Only Look Once (YOLO): Unified Real-Time Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/yolo-170616085751-thumbnail.jpg?width=640&height=640&fit=bounds)










































































