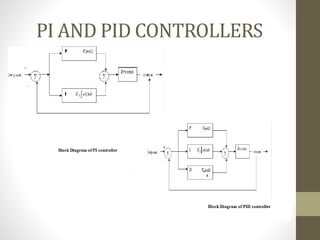
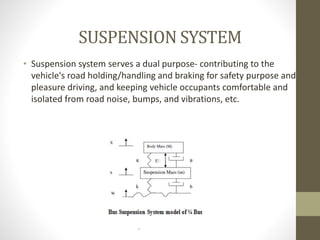
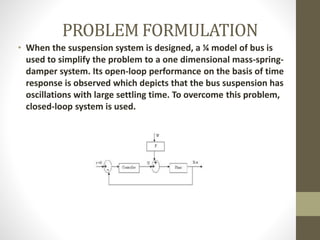
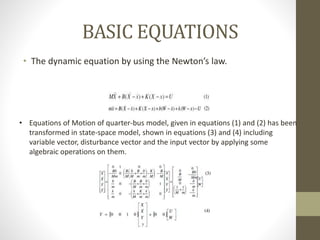
This document discusses using PI and PID controllers to control the vibration of a bus suspension system. It presents a quarter-bus model to simplify the suspension system to a single mass-spring-damper system. The open-loop response shows oscillations with a large settling time. To address this, closed-loop control with PI and PID controllers is proposed. The controllers use proportional, integral and derivative terms to increase response speed and eliminate steady state error from disturbances. Simulation results in MATLAB/Simulink will analyze and improve the bus suspension system response.