Download as PDF, PPTX
![BB8: A Scalable, Accurate, Robust to Partial Occlusion Method for
Predicting the 3D Poses of Challenging Objects without Using Depth
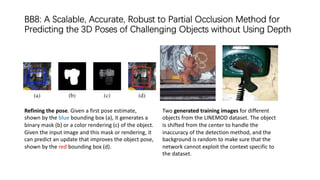
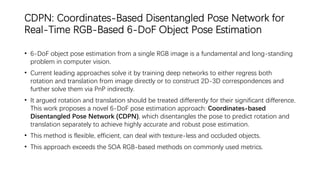
• It first finds the objects in 2D, obtaining a first estimate of the 3D poses, including objects
with a rotational symmetry, and finally refining the initial pose estimates.
• It identifies the 2D centers of the objects of interest in the input images.
• It could use a standard 2D object detector, but it develops an approach based on
segmentation that resulted in better performance as it can provide accurate locations even
under partial occlusions.
• It predicts the 3D pose of an object by applying a Deep Network to an image window
centered on the 2D object center.
• As for the segmentation, it uses VGG as a basis for this network, which allows to handle all
the objects of the target dataset with a single network.
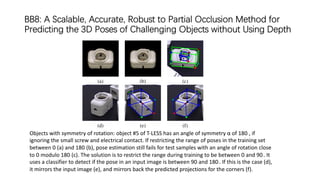
• For an object with an angle of symmetry α, it can therefore restrict the poses used for
training to the poses where the angle of rotation around the symmetry axis is within the
range [0; α], to avoid the ambiguity between images.
• Denote by β the rotation angle, and introduce the intervals r1 = [0; α/2[ and r2 = [α/2; α[.
• To avoid ambiguity, restrict β to be in r1 for the training images used in the optimization.
• It introduces a CNN classifier to predict at run-time if β is in r1 or r2.](https://image.slidesharecdn.com/poseestimationdl-200221210707/85/Pose-estimation-from-RGB-images-by-deep-learning-11-320.jpg)

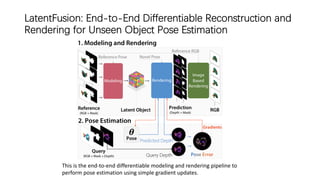
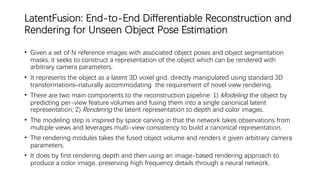
![LatentFusion: End-to-End Differentiable Reconstruction and
Rendering for Unseen Object Pose Estimation
[6] X Deng, A Mousavian, Y Xiang, F Xia, T Bretl, and D Fox. “PoseRBPF: A rao-blackwellized particle filter for
6D object pose tracking”. Robotics: Science and Systems (RSS), 2019.](https://image.slidesharecdn.com/poseestimationdl-200221210707/85/Pose-estimation-from-RGB-images-by-deep-learning-59-320.jpg)

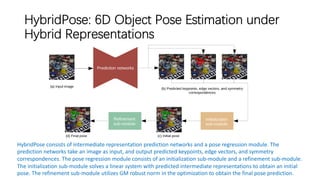
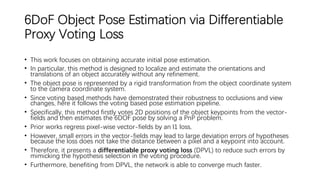


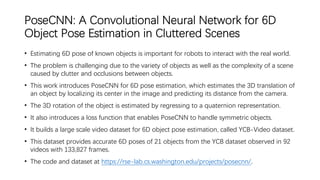
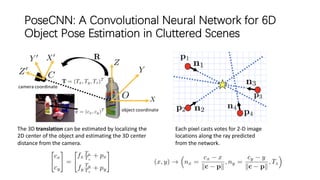
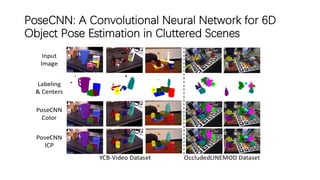
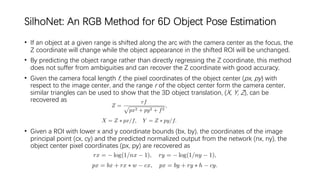
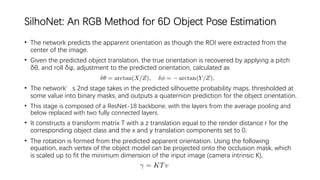
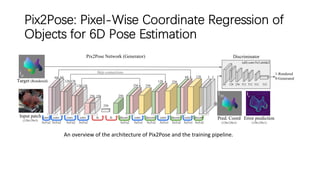
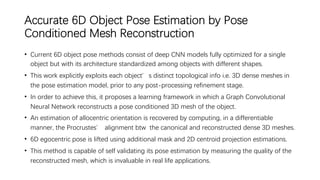
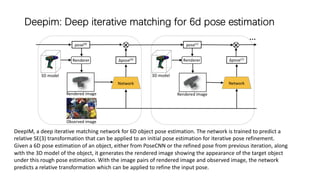
This document discusses various deep learning approaches to 6D object pose estimation from RGB images, focusing on methods such as PoseCNN and BB8, which handle challenges like clutter and occlusion. It outlines the architecture and techniques for accurately estimating the 3D translation and rotation of objects, including the development of specific datasets like the YCB-Video dataset. Additionally, it highlights more recent advancements like PVNet and Silhonet, which improve upon prior models by enhancing keypoint localization and silhouette prediction to achieve robust performance in real-time pose estimation.
![[Mmlab seminar 2016] deep learning for human pose estimation](https://cdn.slidesharecdn.com/ss_thumbnails/mucdgsomrcs8cgkh9gsp-signature-54f17826ed7e29e13653ed835b10fabd79d8e26ac84412798c7e96ef7d109006-poli-160811023645-thumbnail.jpg?width=640&height=640&fit=bounds)

























![Objects as points (CenterNet) review [CDM]](https://cdn.slidesharecdn.com/ss_thumbnails/objectsaspointscenternetreviewcdm-200327113331-thumbnail.jpg?width=640&height=640&fit=bounds)

![[NS][Lab_Seminar_240805]CheckerPose.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/nslabseminar240805checkerpose-240806103350-95148d67-thumbnail.jpg?width=640&height=640&fit=bounds)