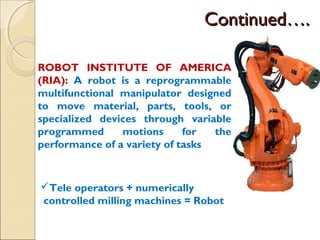
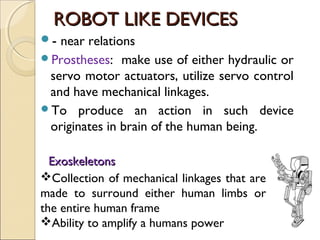
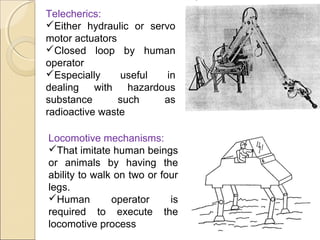
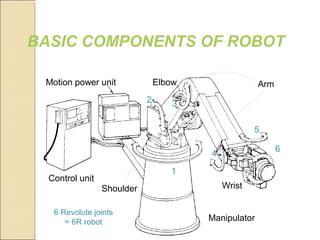
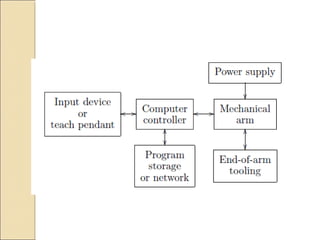
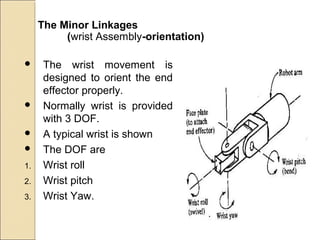
This document provides information about robotics and machine vision systems. It discusses the objectives of studying these topics, which include understanding the components of industrial robots, deriving kinematics and dynamics equations, programming robots for applications, and learning machine vision systems. Key events in the history of robotics are outlined from the 1940s to present day. The basic components and functions of an industrial robot are described. Reasons for using robots include handling hazardous materials, improving consistency and productivity.