Download as PDF, PPTX


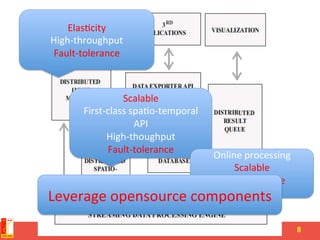
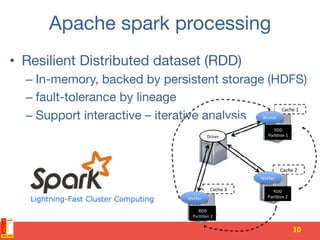
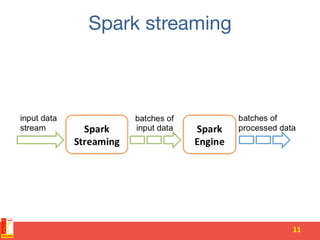
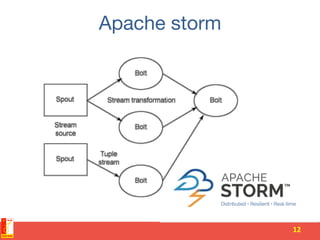
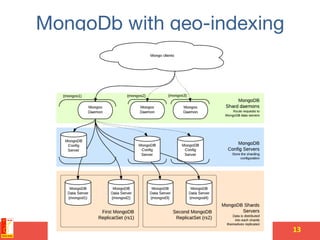
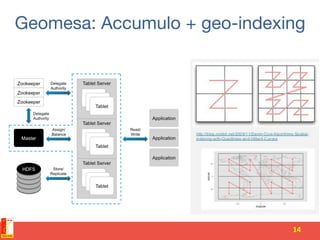
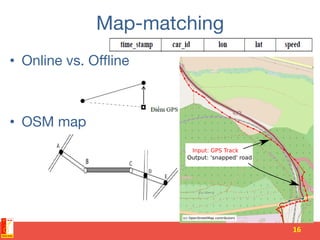
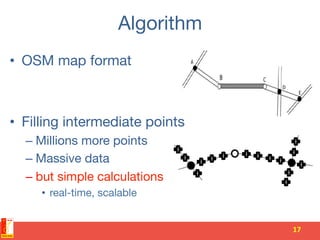
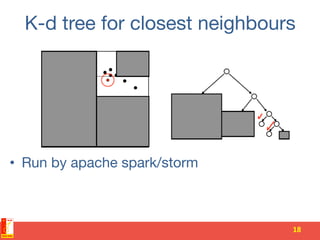
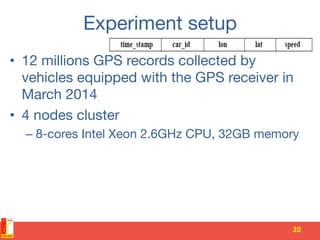
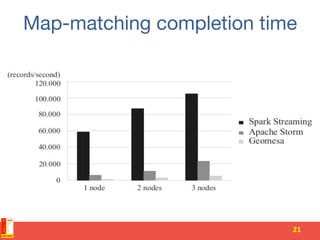
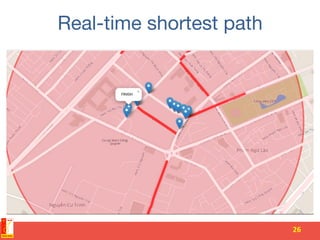

This document presents GPSInsights, a framework for efficiently storing and mining massive real-time vehicle location data. The framework uses an architecture based on scalable open-source components like Apache Spark, Storm, MongoDB and GeoMesa to store GPS data in real-time and perform mining tasks like scalable map-matching. The document describes experiments on 12 million GPS records which showed the framework can complete map-matching within seconds and scale to support millions of vehicles.