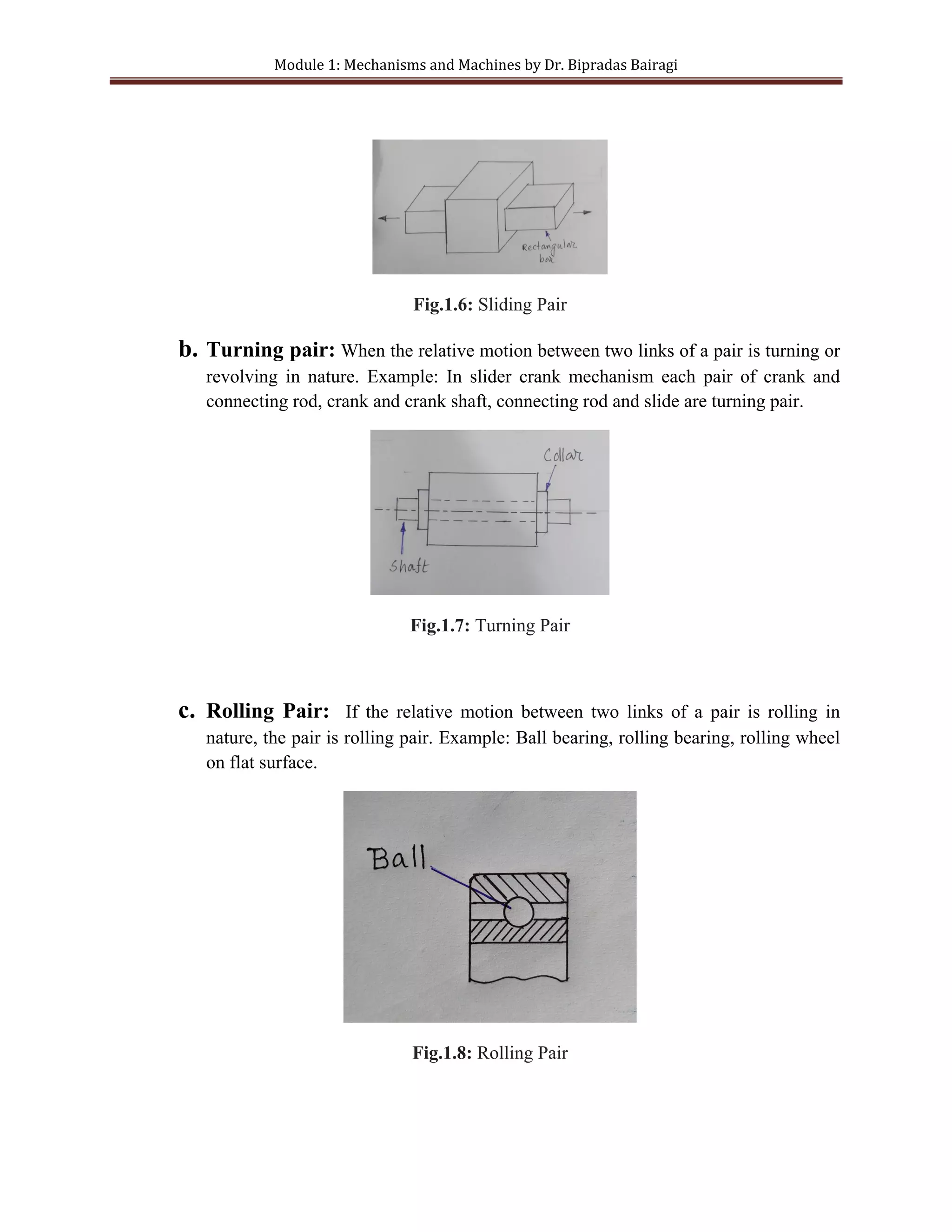
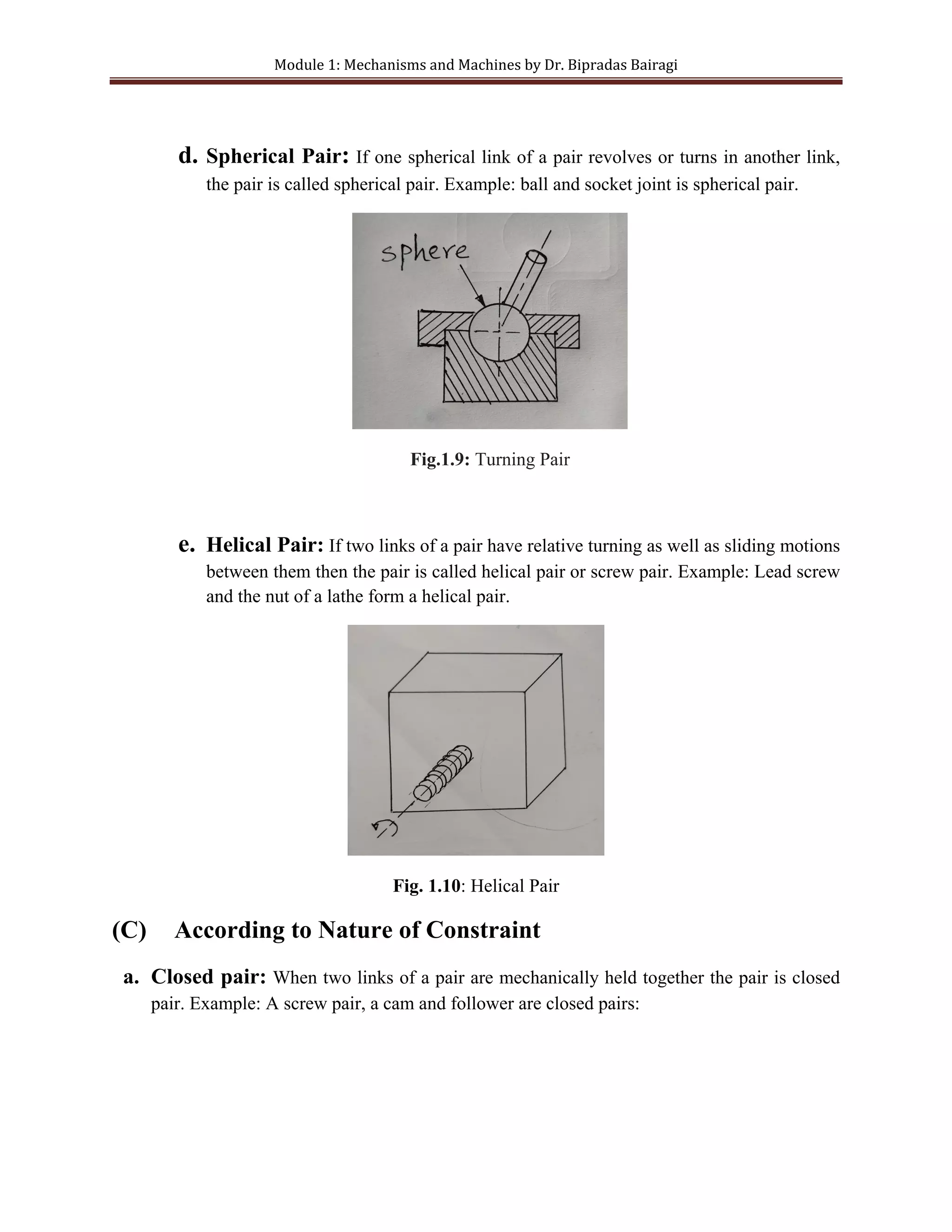
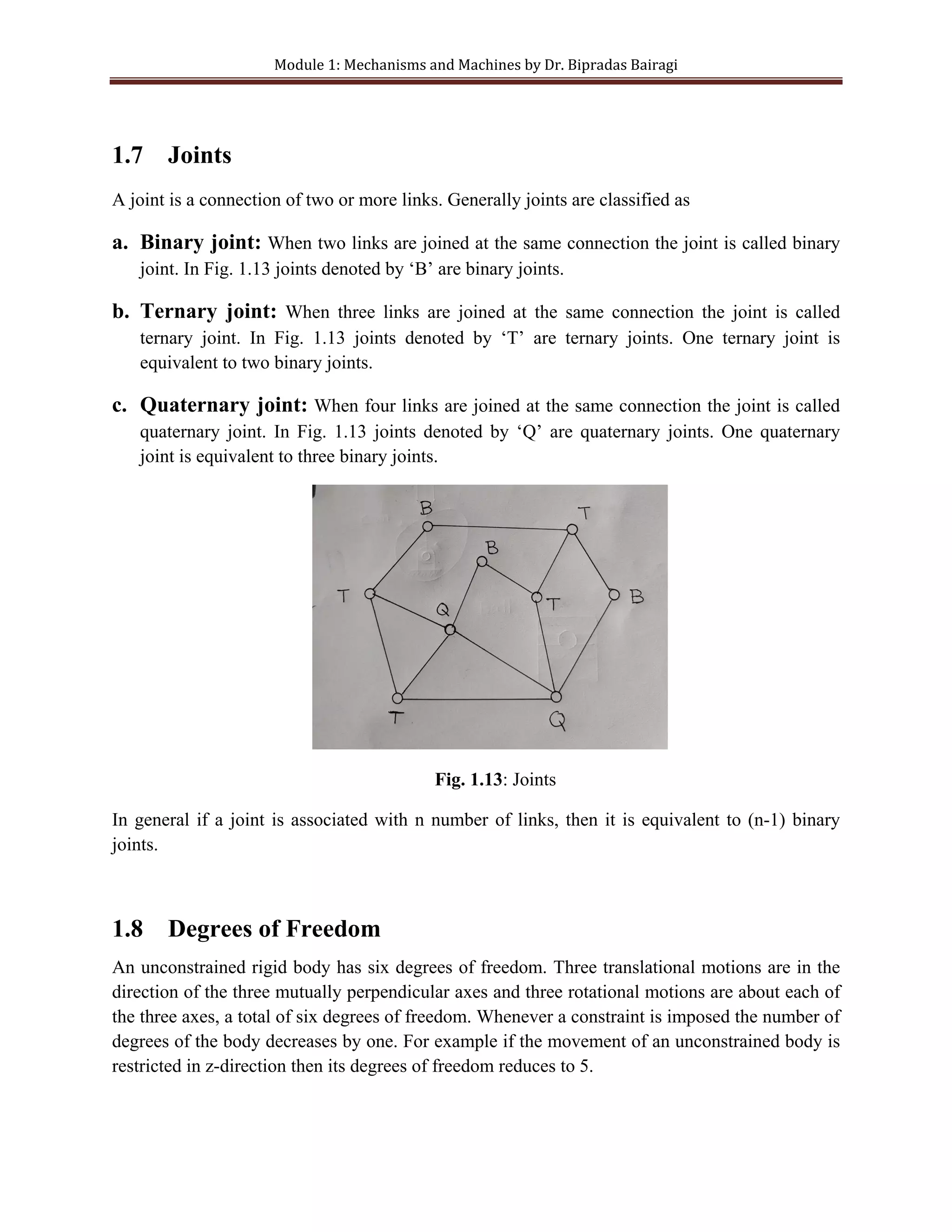
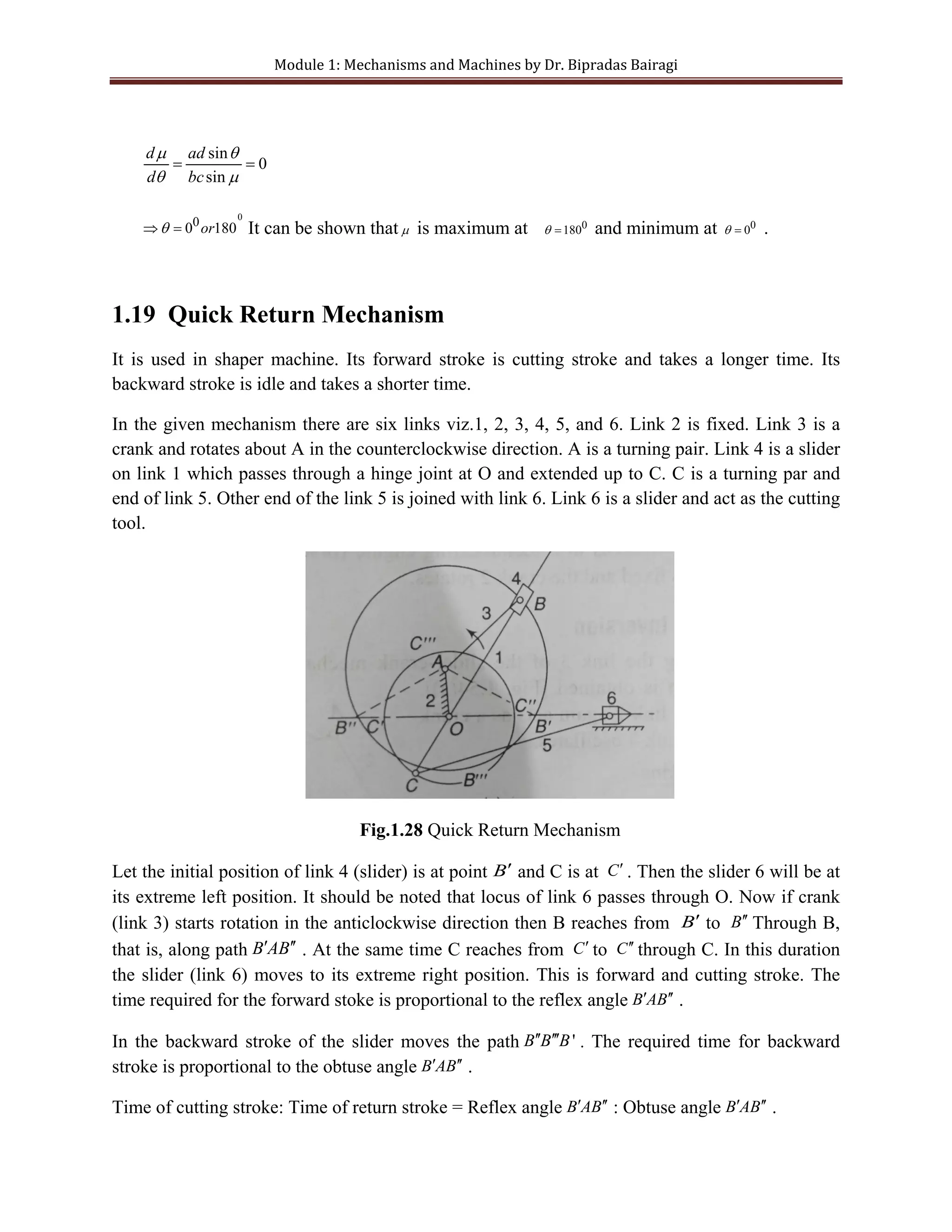
This document provides an overview of kinematics theory and concepts related to mechanisms and machines. It defines key terms like mechanisms, kinematic pairs, degrees of freedom, and mobility. It also describes common mechanisms like the slider-crank and four-bar mechanisms. Examples of constrained motions and different types of links, joints, and chains are explained.