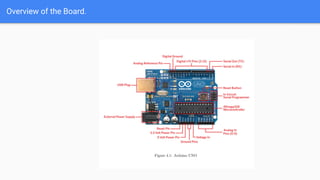
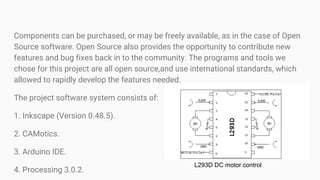
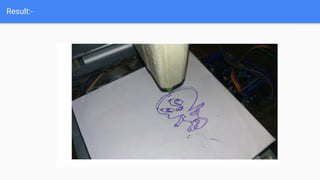
This document describes a mini CNC machine project created by Shakti Patel at Parul University. The project uses an Arduino UNO to control stepper motors and a servo motor to move a cutting head along X, Y, and Z axes. Open source software like Inkscape, CAMotics, the Arduino IDE, and Processing are used to design models, generate G-code instructions, and control the hardware. The project aims to build a basic low-cost 2D CNC machine within constraints of understanding CNC models and integrating different software and hardware components.