Download as PDF, PPTX


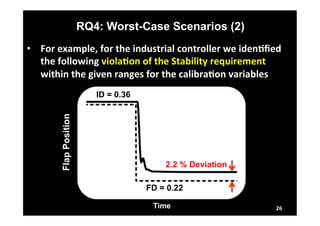
![Our Earlier Work:
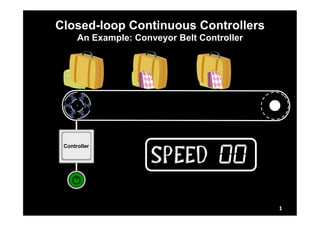
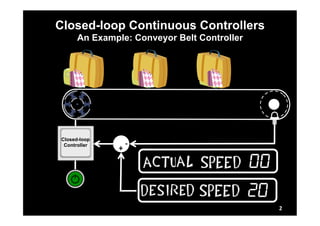
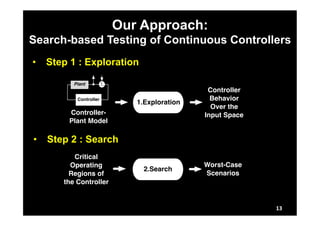
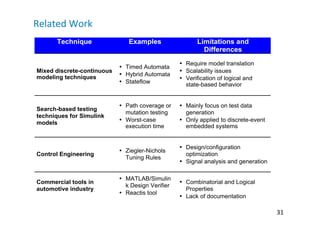
Search-based Testing of Continuous Controllers
with fixed values for the configuration parameters
1.Exploration 2.Single-state
ID FD
FD
ID
Smoothness HeatMap
Initial Desired (ID)
Final Desired (FD)
Smoothness Worst-case Scenario
Controller-plant
model
HeatMap
Diagram
Worst-Case
Scenarios
List of
Critical
Regions
Domain
Expert
search
Controller Input Space
Fst
Fsm
Fr
14
Published
in
[IST
Journal
2014,
SSBSE
2013]](https://image.slidesharecdn.com/reza-ase-140922102523-phpapp02/85/MiL-Testing-of-Highly-Configurable-Continuous-Controllers-15-320.jpg)
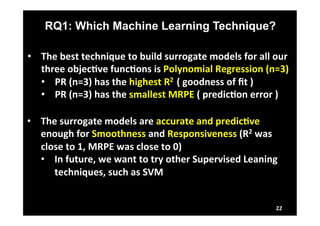


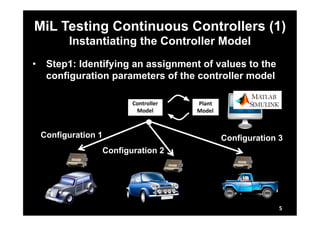
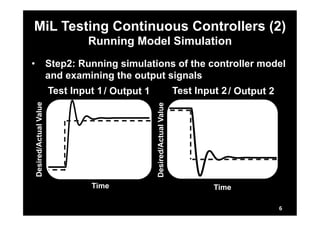
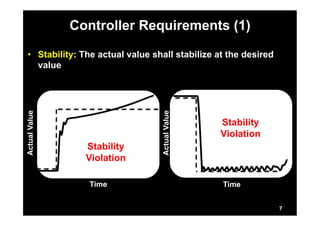
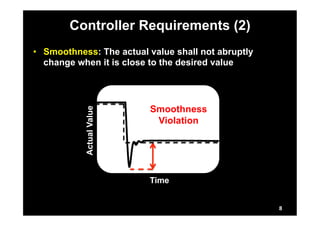
This document describes research on model-in-the-loop (MiL) testing of highly configurable continuous controllers. The researchers developed an approach using dimensionality reduction, surrogate modeling, and search-based techniques to efficiently test controllers across large configuration spaces. They applied their approach to an industrial conveyor belt controller case study. Evaluation results showed that their technique could find stability, smoothness, and responsiveness violations that previous approaches had missed. It provided a scalable way to thoroughly test continuous controller models over varied parameter configurations.