Download as PDF, PPTX
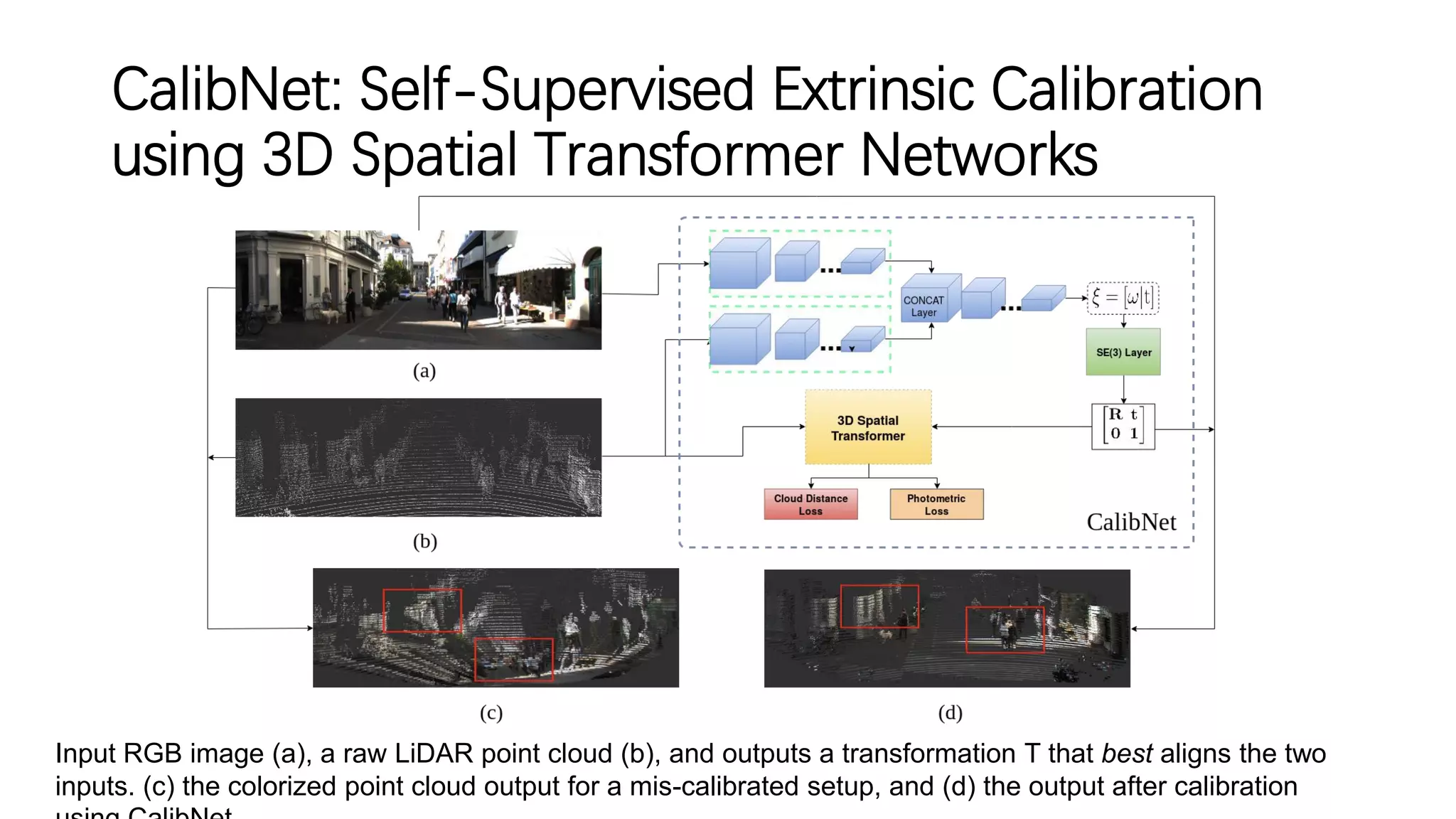
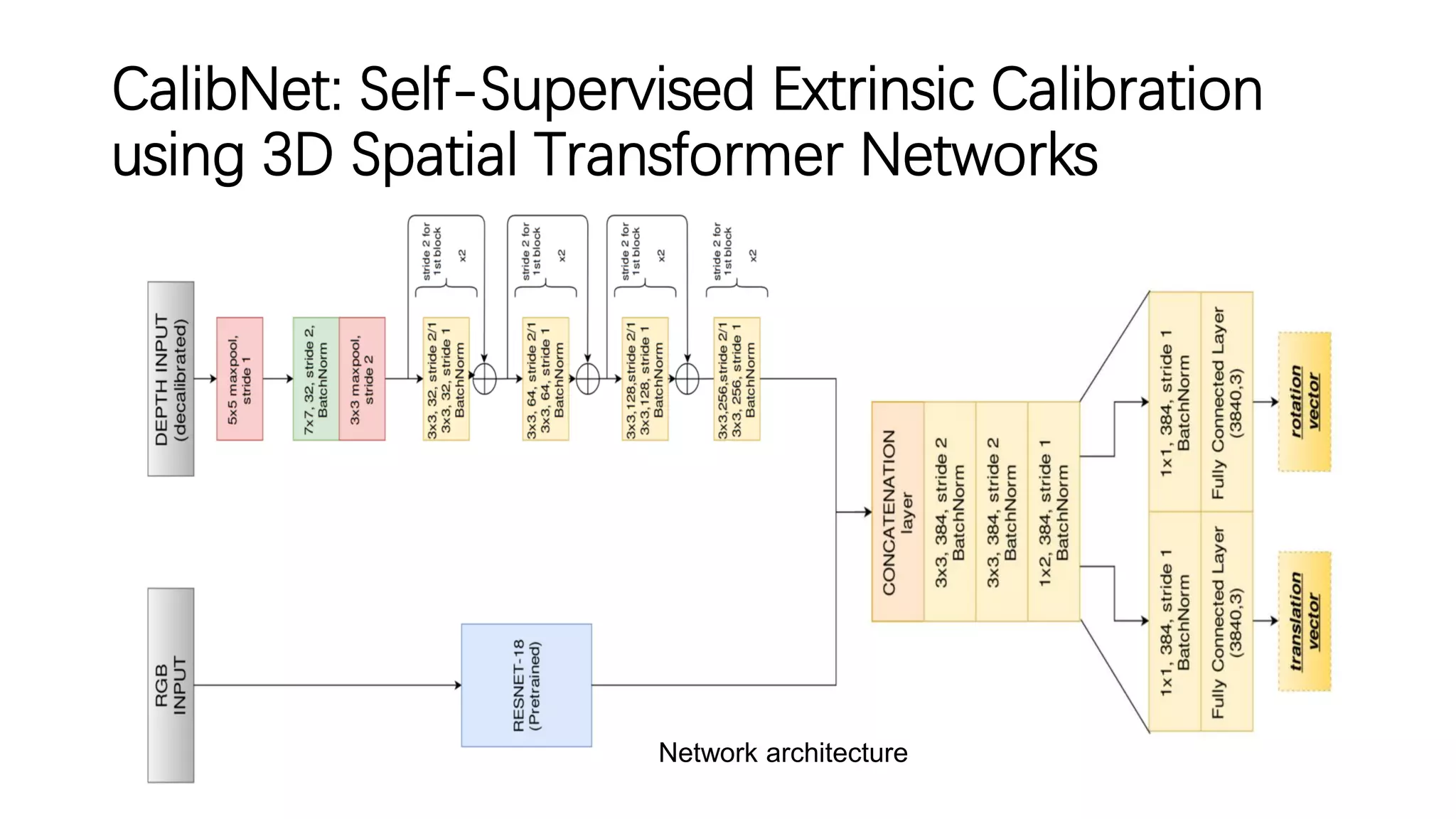
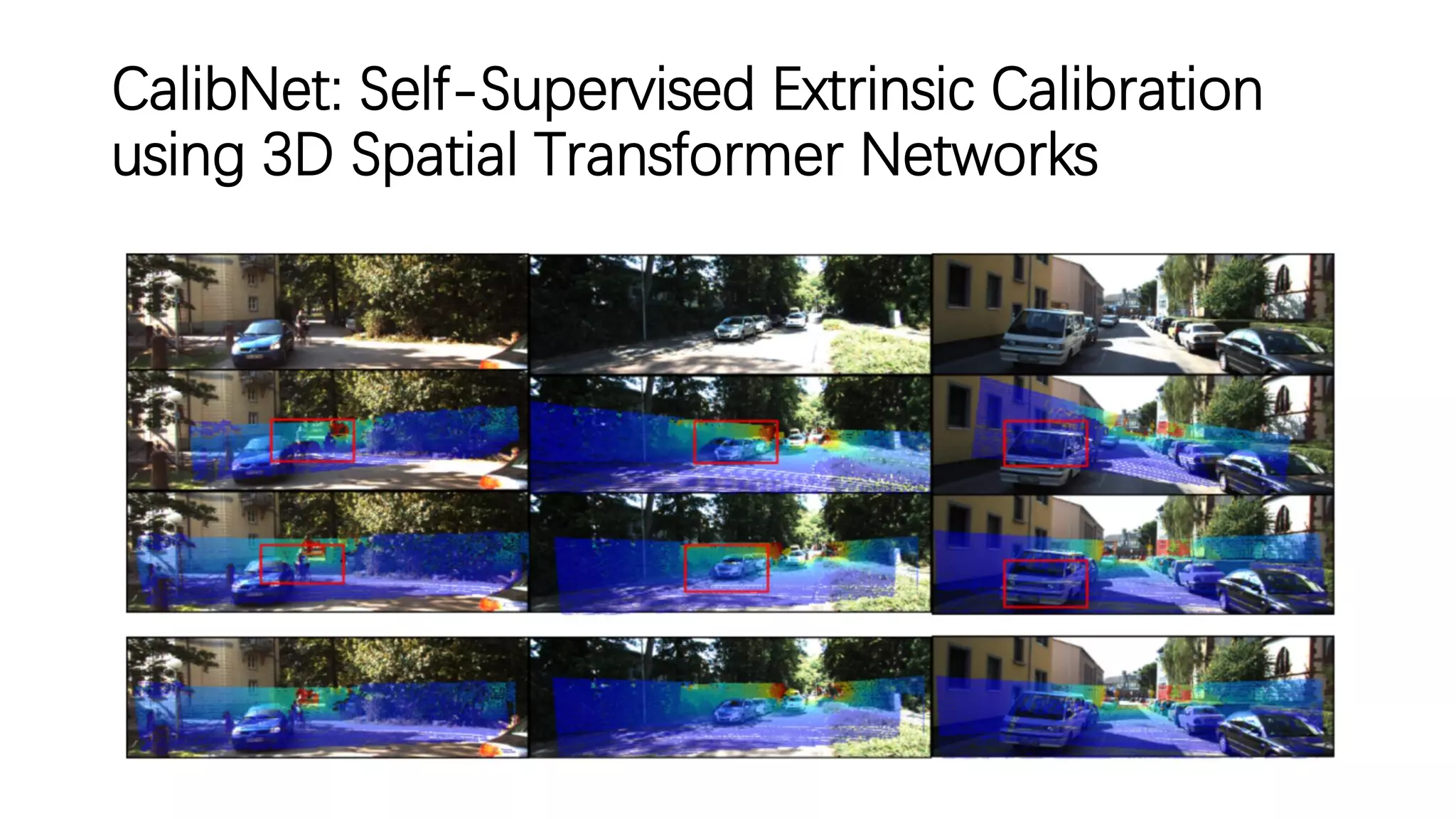



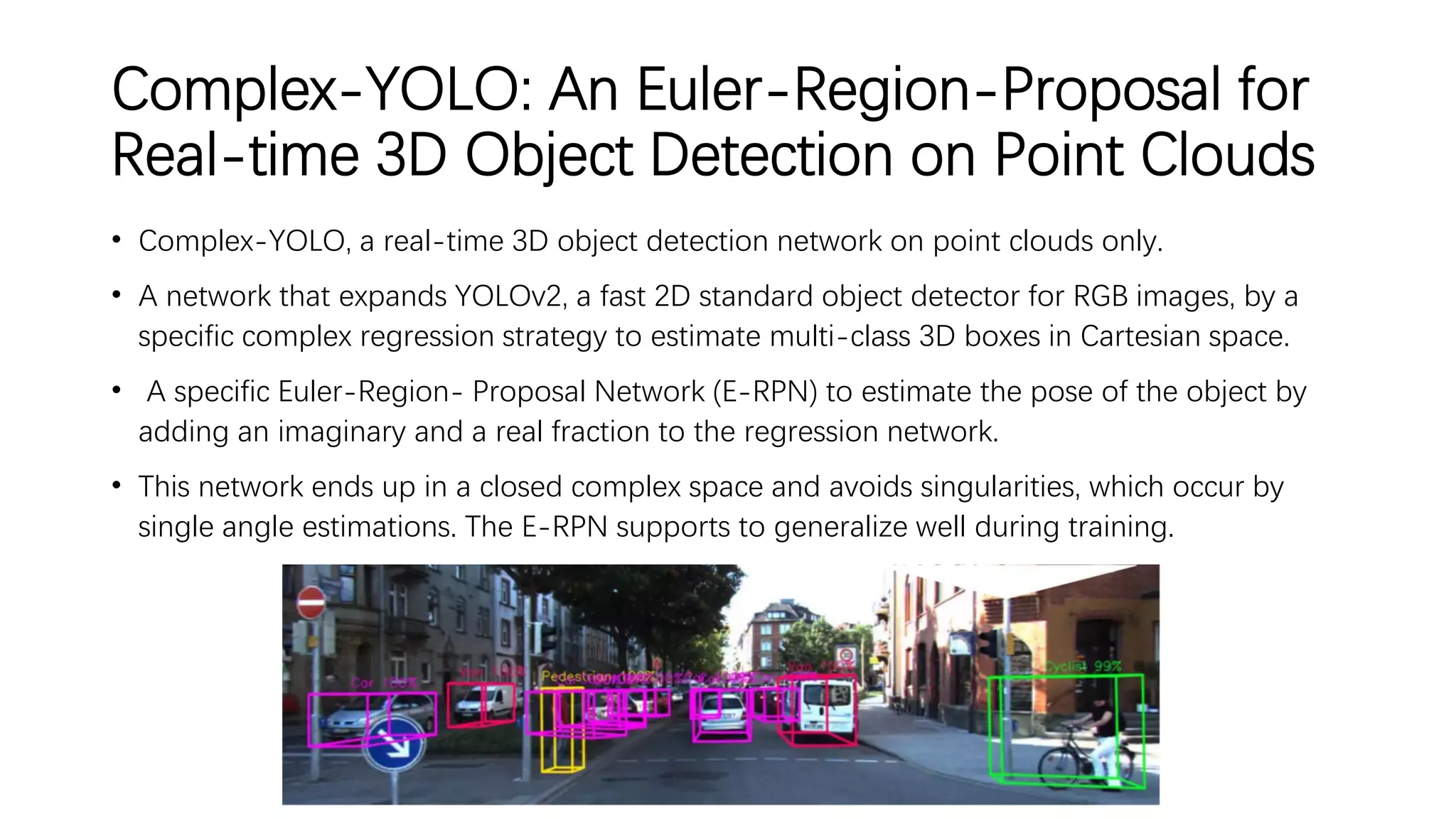
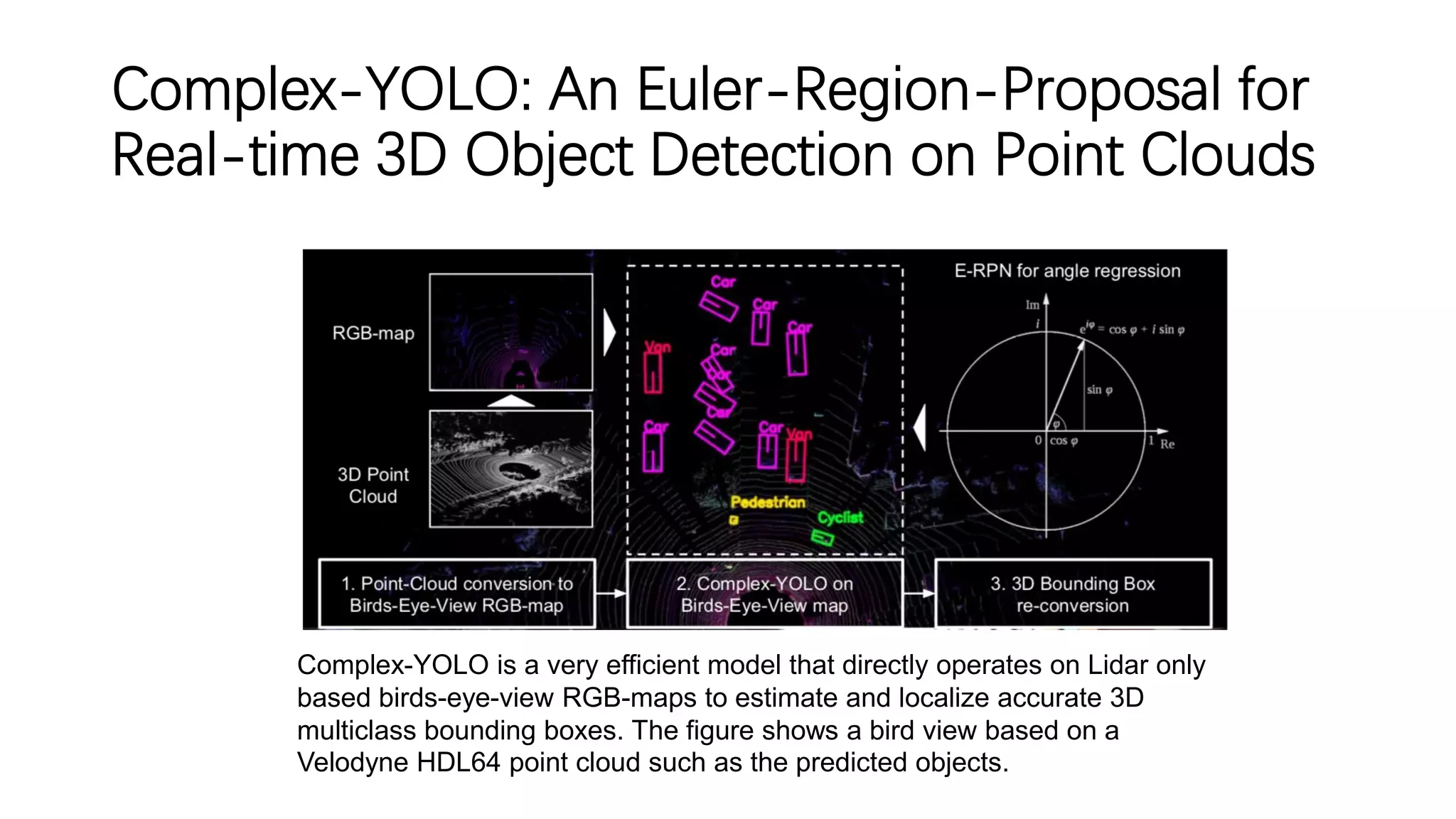
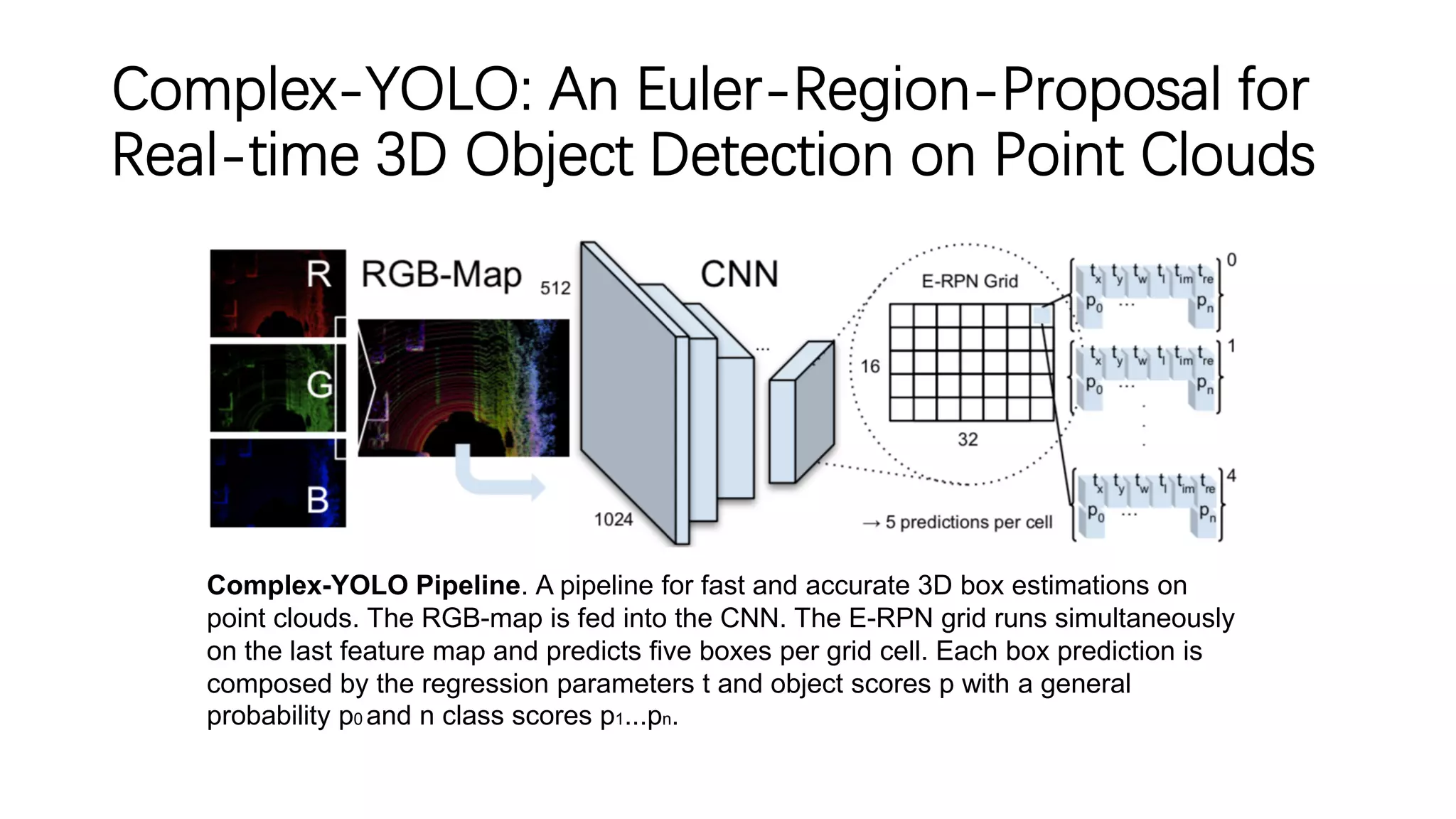
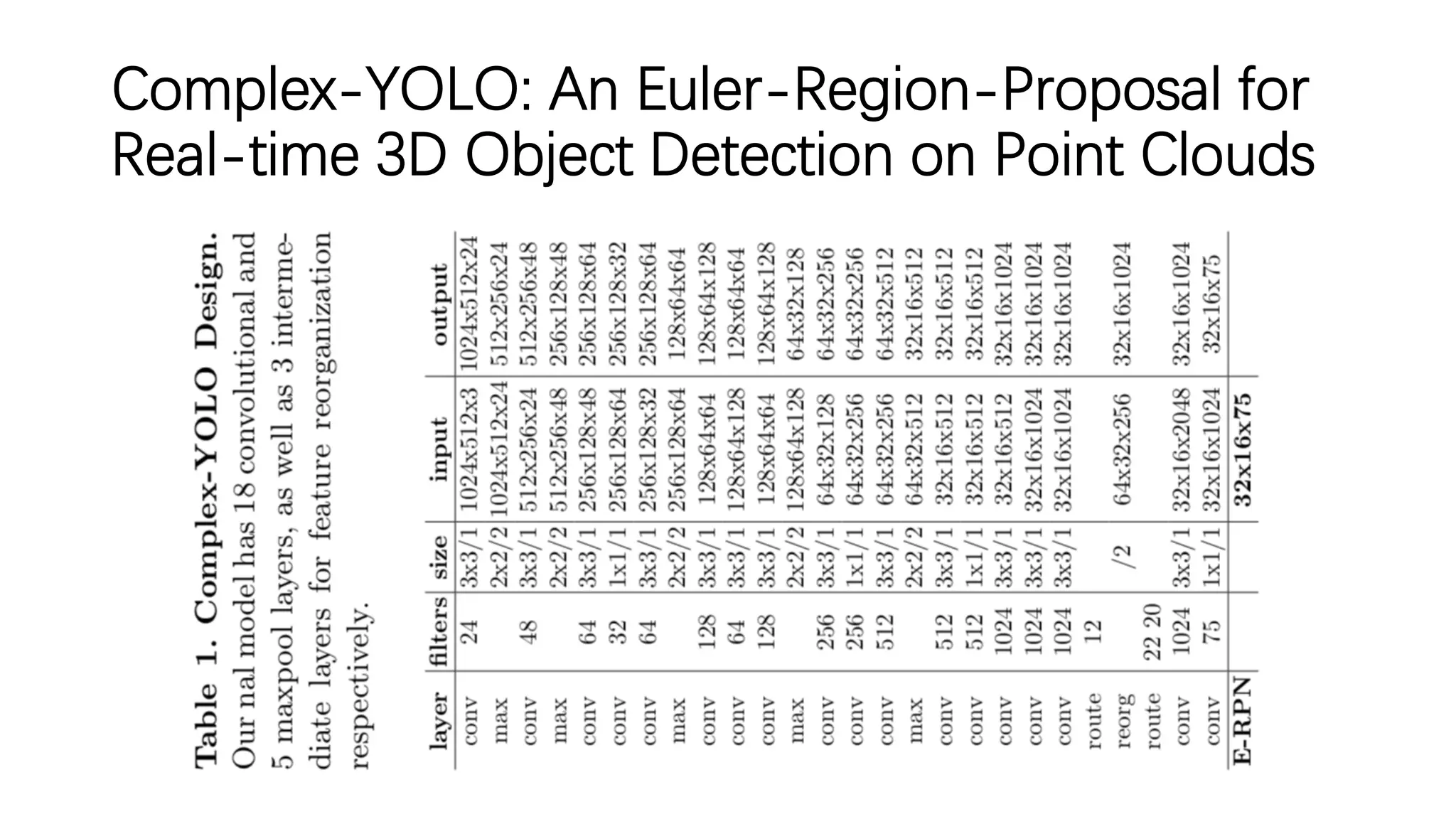
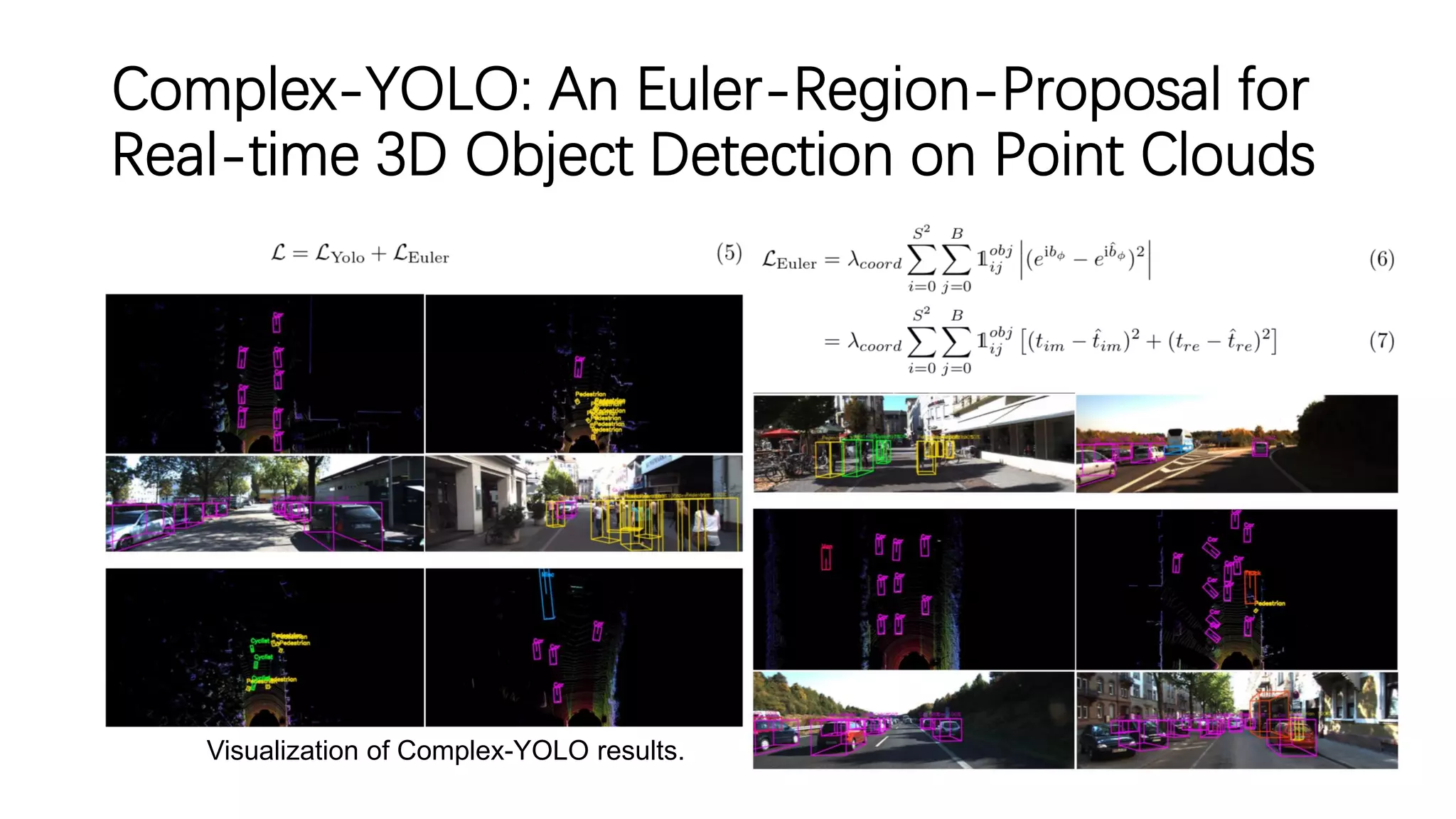
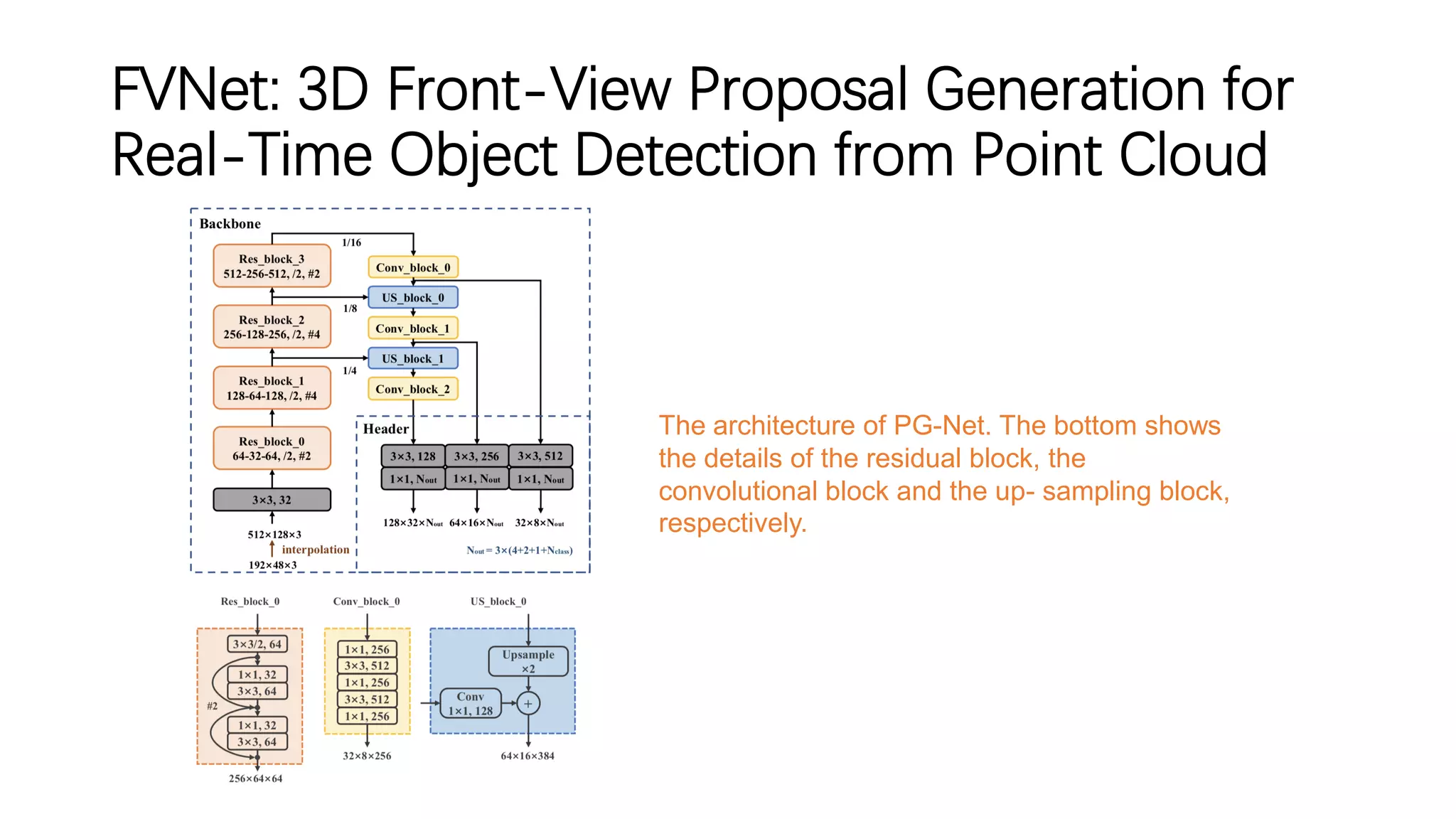
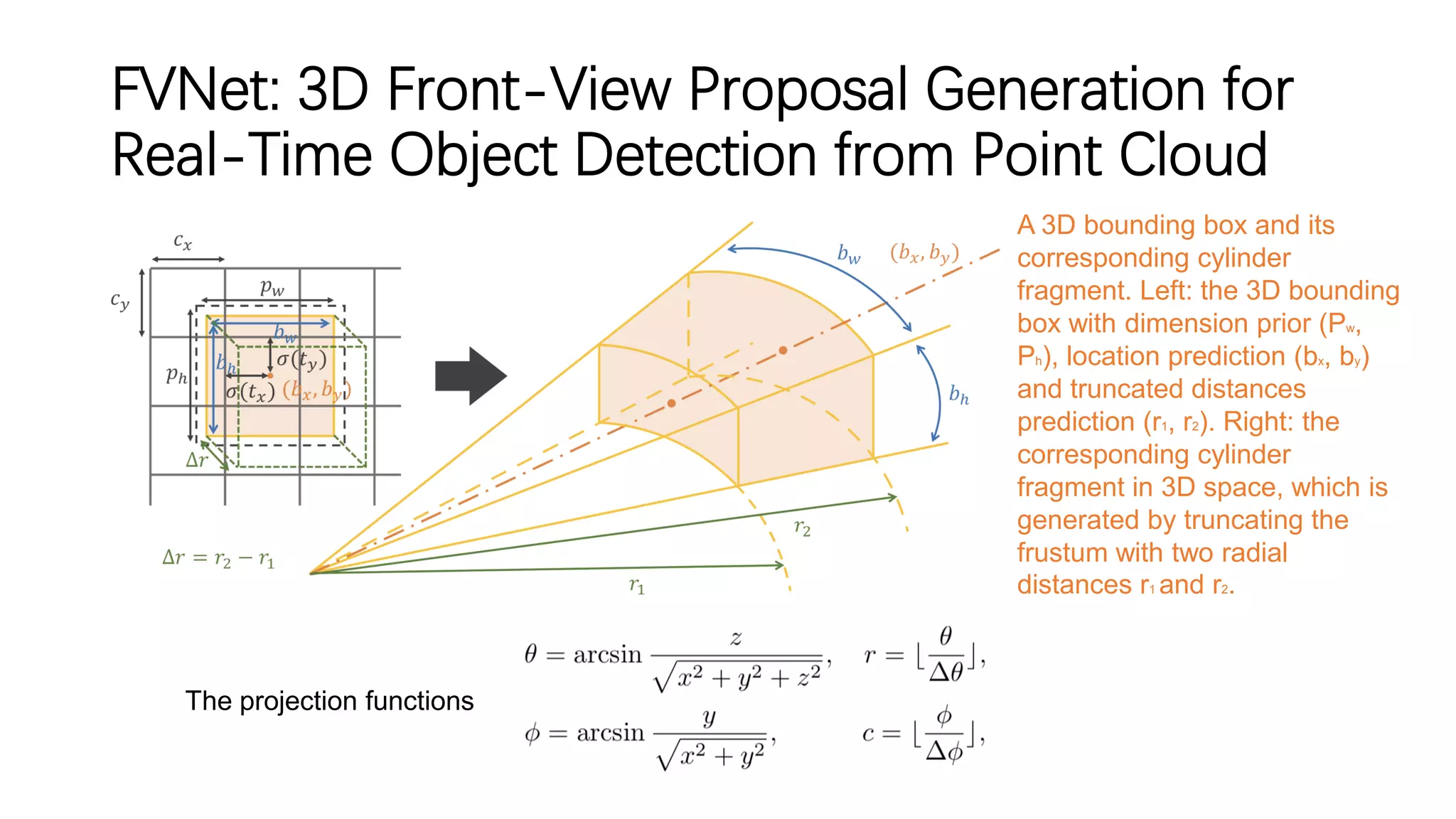
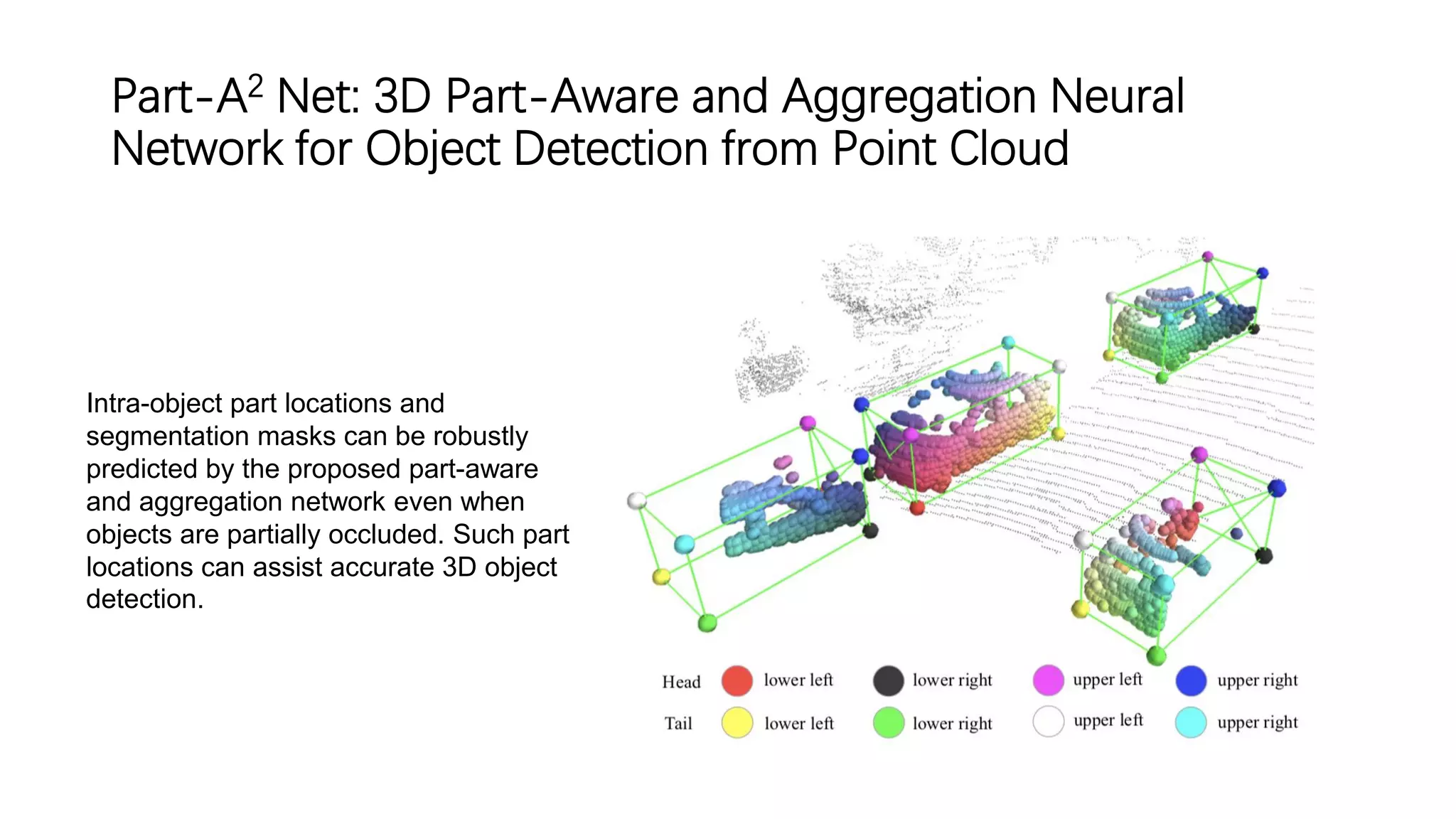
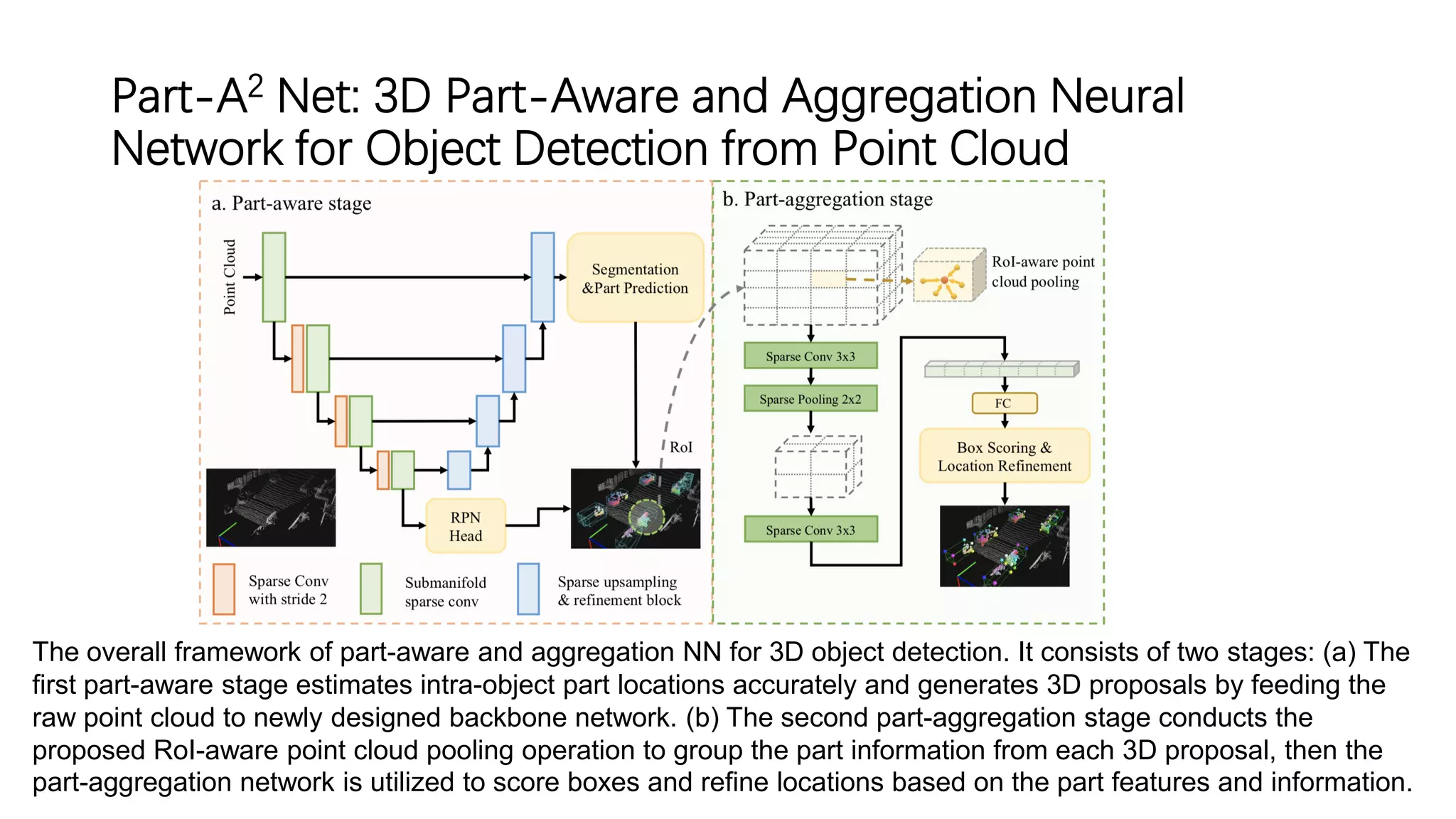
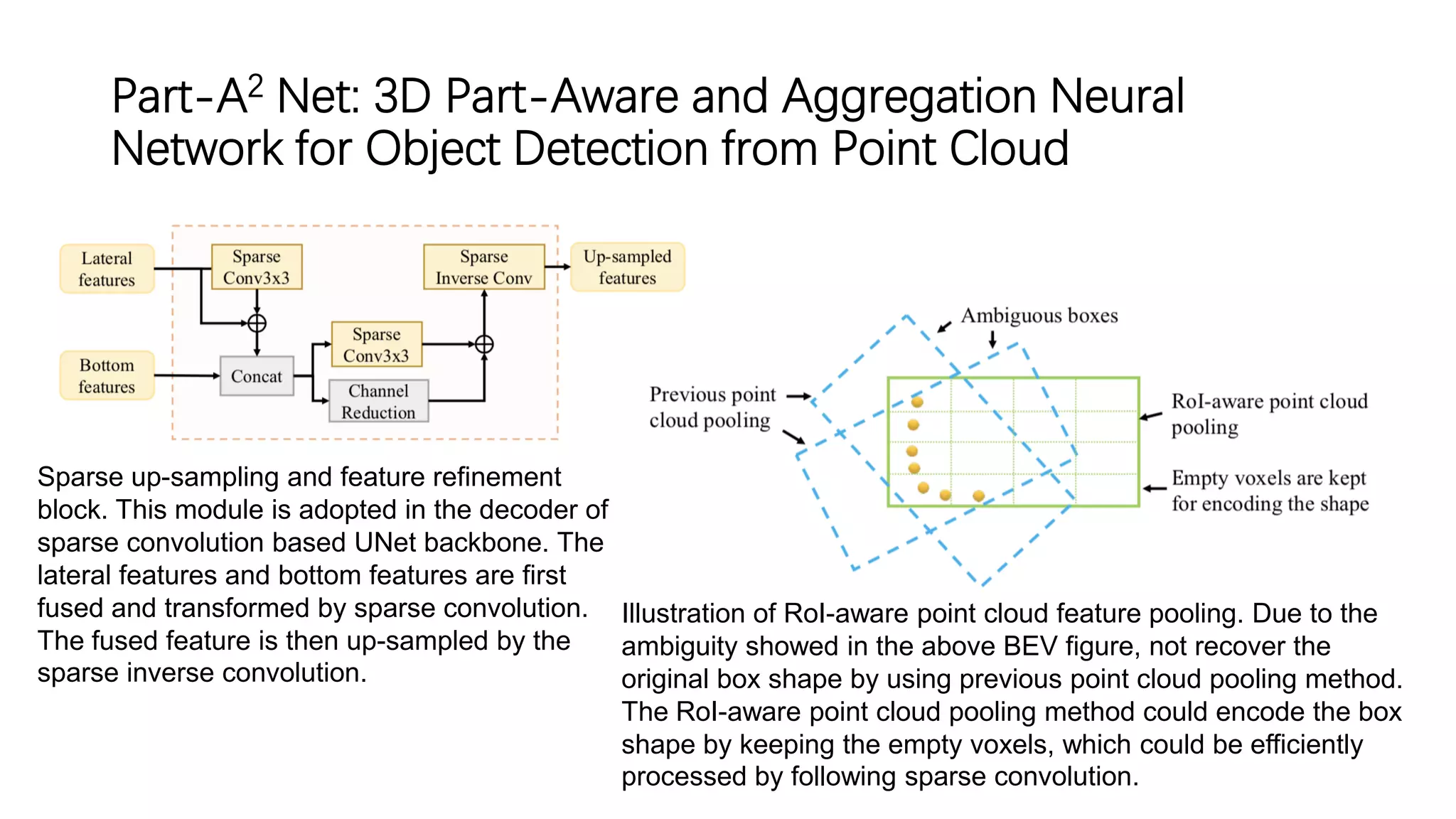
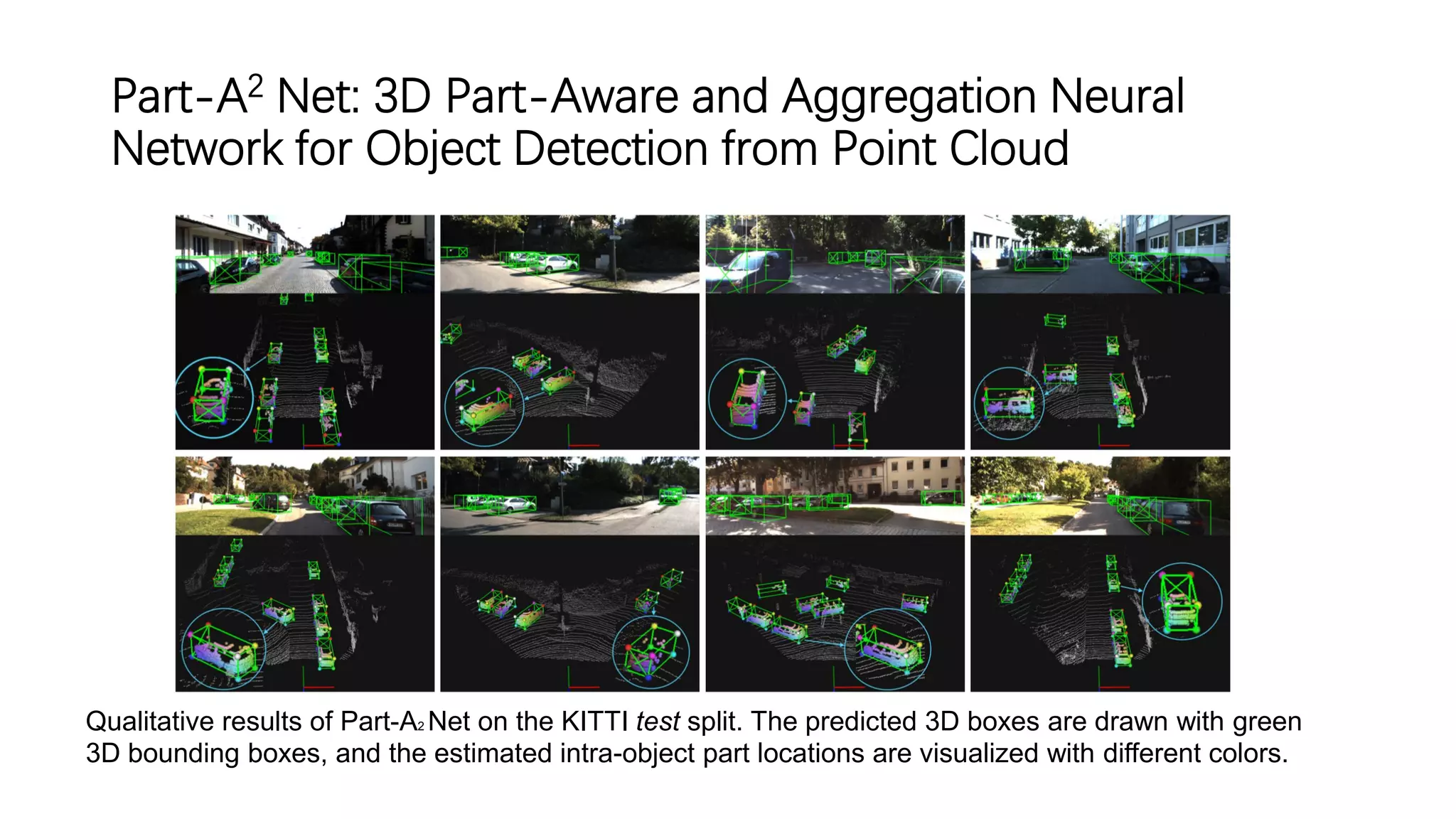


The document discusses various deep learning techniques for lidar-based autonomous driving, focusing on innovations such as CalibNet for self-supervised calibration of sensors, PointPillars for efficient object detection, and Complex-YOLO for real-time 3D detection. It also introduces methods like FVNet for 3D proposal generation, Part-A2 Net for part-aware detection, and Latte for improving lidar point cloud annotation through sensor fusion. Overall, the text presents advancements aimed at enhancing performance and efficiency in detecting and processing objects in autonomous driving scenarios.


















![[DL輪読会]Swin Transformer: Hierarchical Vision Transformer using Shifted Windows](https://cdn.slidesharecdn.com/ss_thumbnails/swintransformer-210514020542-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]A Higher-Dimensional Representation for Topologically Varying Neural R...](https://cdn.slidesharecdn.com/ss_thumbnails/ahigher-dimensionalrepresentationfortopologicallyvaryingneuralradiancefields1-210924021911-thumbnail.jpg?width=640&height=640&fit=bounds)






![[NS][Lab_Seminar_240611]Graph R-CNN.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/nslabseminar240611graphr-cnn-240704112605-f42276be-thumbnail.jpg?width=640&height=640&fit=bounds)