Download as PDF, PPTX
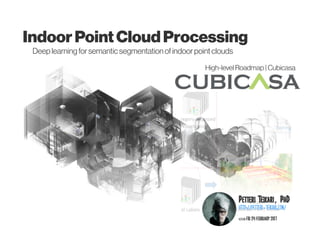

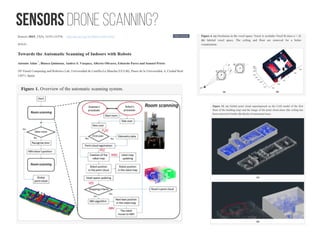
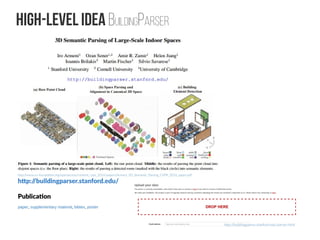
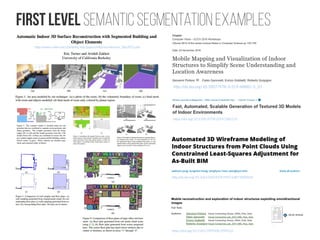
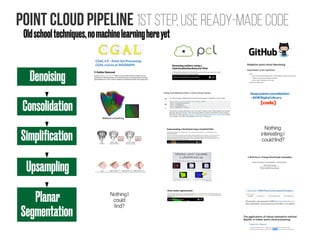
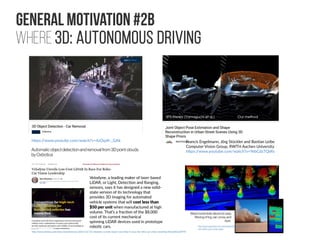
![First level Pre-processing justuseexistingcode
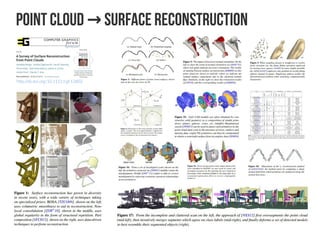
Point CloudDenoisingviaMovingRPCA
EMattei,ACastrodad,2016-Computer GraphicsForum-WileyOnlineLibrary
Walls become a lot better planar in top view
Optimize consolidation
for point clouds
Screened PoissonReconstruction
https://github.com/mkazhdan/PoissonRecon, C++ code)
CGAL, PointSetProcessing
http://doc.cgal.org/latest/Point_set_processing_3/
http://vcc.szu.edu.cn/research/2013/EAR/
Deep points consolidation -ACMDigital Library
bySWu -2015- Cited by 2 - Related articles
[webpage] [pdf] [video] [ppt] [code] [data]
EAR/WLOPCODE AVAILABLE
in CGAL as illustrated below
Consolidationof Low qualityPoint‐
Clouds fromOutdoorScenes](https://image.slidesharecdn.com/petteri-indoorpointcloudprocessing-170322134125/85/Indoor-Point-Cloud-Processing-Deep-learning-for-semantic-segmentation-of-indoor-point-clouds-11-320.jpg)

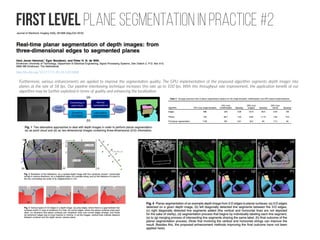
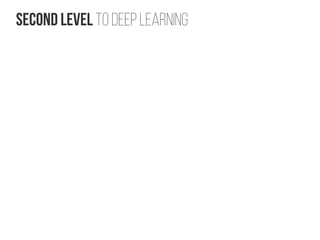
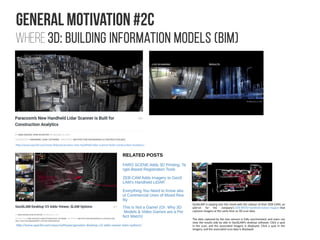
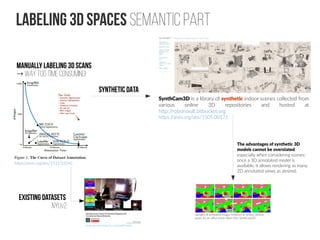
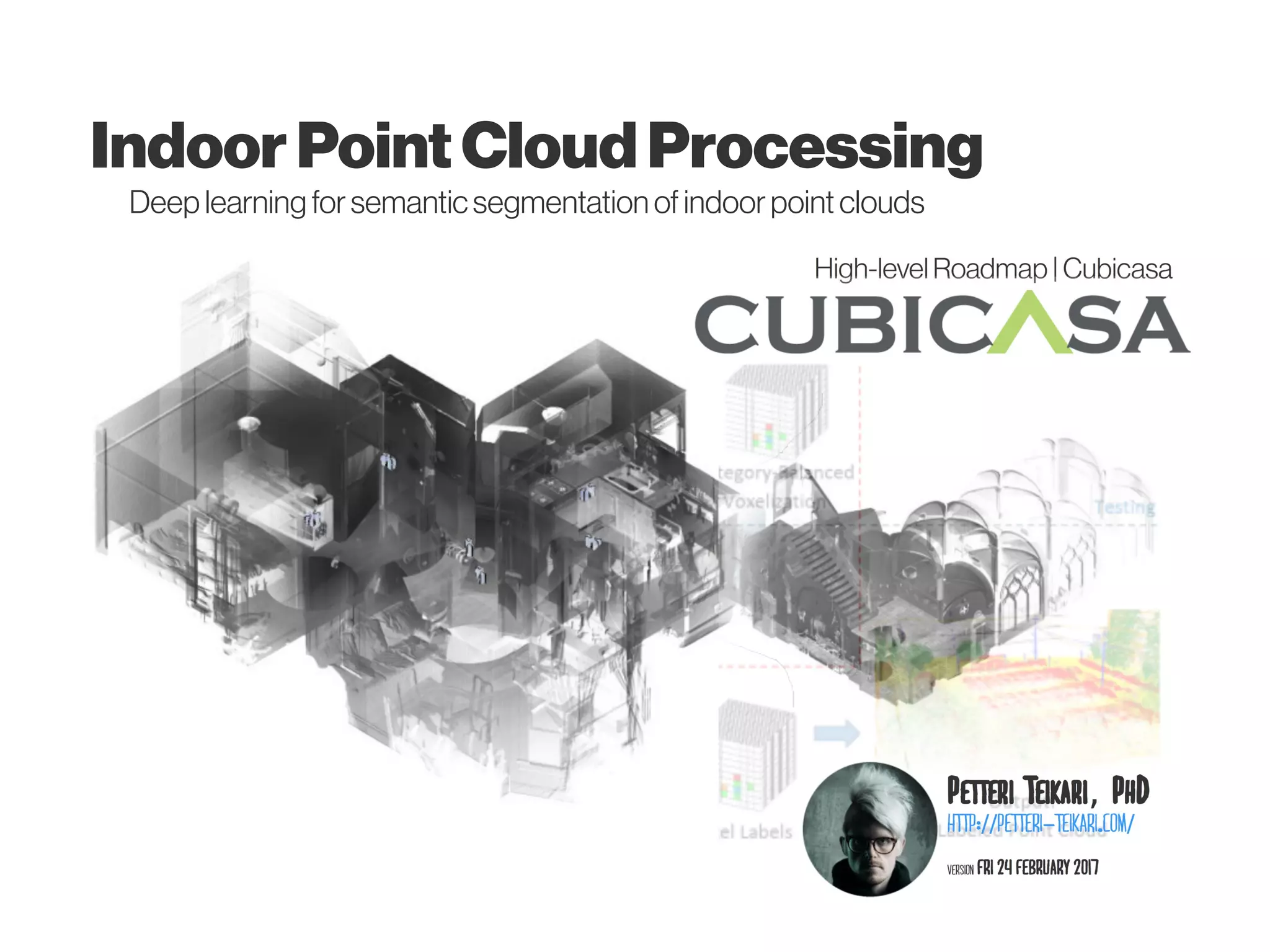
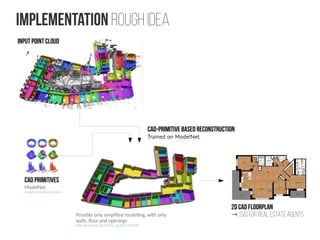
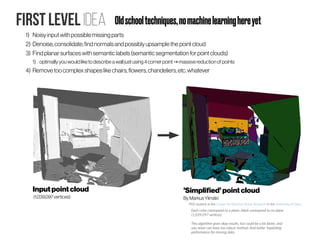
![SYNTHETIC Datasets #2
Creating large datasets with pixelwise semantic labels is known to be very challenging
due to the amount of human effort required to trace accurate object boundaries.
High-quality semantic labeling was reported to require 60 minutes per image for the
CamVid dataset and 90 minutes per image for the Cityscapes dataset. Due to the
substantial manual effort involved in producing pixel-accurate annotations, semantic
segmentation datasets with precise and comprehensive label maps are orders of
magnitude smaller than image classification datasets. This has been referred to as the
“curse of dataset annotation”: the more detailed the semantic labeling, the smaller
the datasets.
Somewhat orthogonal to our work is the use of indoor scene models to train deep
networks for semantic understanding of indoor environments from depth images [
15, 33]. These approaches compose synthetic indoor scenes from object models and
synthesize depth maps with associated semantic labels. The training data synthesized
in these works provides depth information but no appearance cues. The trained
models are thus limited to analyzing depth maps.
15
SynthCam3D
previous slide
33](https://image.slidesharecdn.com/petteri-indoorpointcloudprocessing-170322134125/85/Indoor-Point-Cloud-Processing-Deep-learning-for-semantic-segmentation-of-indoor-point-clouds-29-320.jpg)
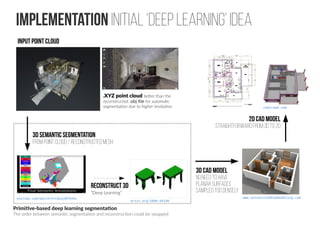
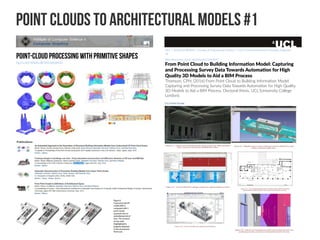
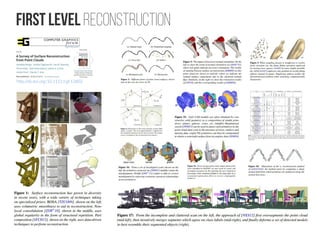
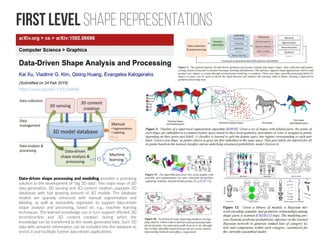
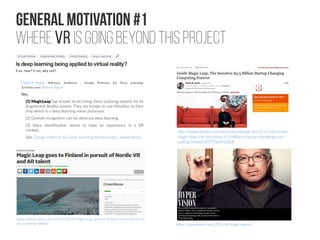
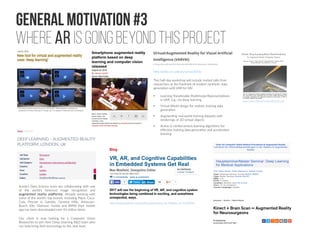
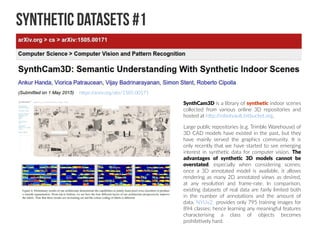
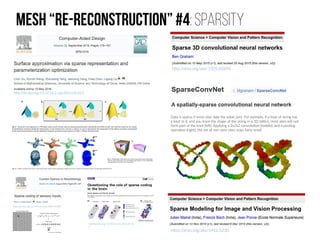
![Point clouds with deep learning: example with Normals
Eurographics Symposium on Geometry Processing 2016, Volume 35 (2016), Number 5
http://dx.doi.org/10.1111/cgf.12983
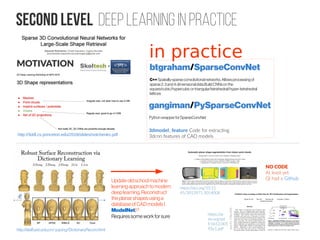
Convolutional neural networks Work on normal estimation with CNNs focus on
using as input RGB images, or possibly RGB-D, but not sparse data such as
unstructured 3D point clouds. CNN-based techniques have been applied to 3D
data though, but with a voxel-based perspective, which is not accurate enough
for normal estimation. Techniques to efficiently apply CNN-based methods to
sparse data have been proposed too [Gra15], but they mostly focus on efficiency
issues, to exploit sparsity; applications are 3D object recognition, again with voxel-
based granularity, and analysis of space-time objects. An older, neuron-inspired
approach [JIS03] is more relevant to normal estimation in 3D point clouds but it
actually addresses the more difficult task of meshing. It uses a stochastic
regularization based on neighbors, but the so-called “learning process” actually is
just a local iterative optimization.
CNNs can also address regression problems such as object pose estimation
[PCFG12]. These same properties seem appropriate as well for the task of learning
how to estimate normals, including in the presence of noise and when several
normal candidates are possible near sharp features of the underlying surface
The question, however, is how to interpret the local neighborhood of a 3D point
as an image-like input that can be fed to a CNN. If the point cloud is structured, as
given by a depth sensor, the depth map is a natural choice as CNN input. But if the
point cloud is unstructured, it is not clear what to do. In this case, we propose to
associate an image-like representation to the local neighborhood of a 3D point via a
Hough transform. In this image, a pixel corresponds to a normal direction, and its
intensity measures the number of votes for that direction; besides, pixel adjacency
relates to closeness of directions. It is a planar map of the empirical probability of
the different possible directions. Then, just as a CNN for ordinary images can exploit
the local correlation of pixels to denoise the underlying information, a CNN for
these Hough-based direction mapsmight also be able to handle noise, identifying a
flat peak around one direction. Similarly, just as a CNN for images can learn a robust
recognizer, a CNN for direction maps might be able to make uncompromising
decisions near sharp features, when different normals are candidate, opting for one
specific direction rather than trading off for an average, smoothed normal.
Moreover, outliers can be ignored in a simple way by limiting the size of the
neighborhood, thus reducing or preventing the influence of points lying far from a
more densely sampled surface
Makes computationally
feasible](https://image.slidesharecdn.com/petteri-indoorpointcloudprocessing-170322134125/85/Indoor-Point-Cloud-Processing-Deep-learning-for-semantic-segmentation-of-indoor-point-clouds-31-320.jpg)

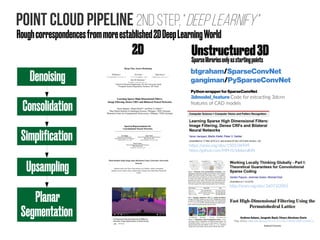
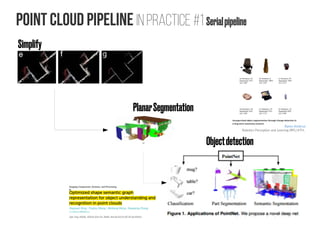

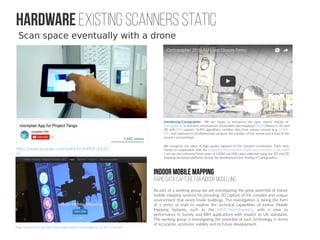
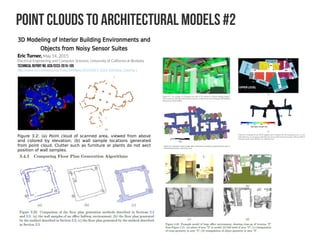
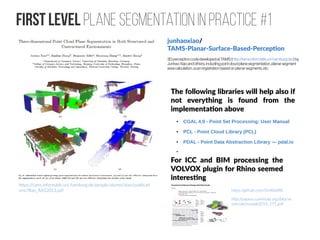
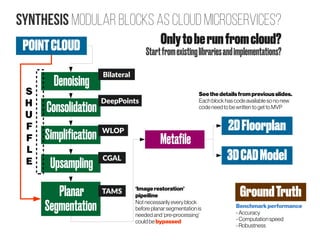
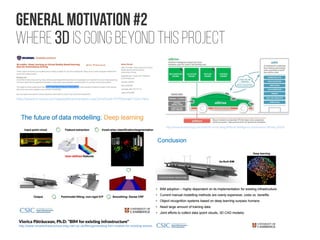
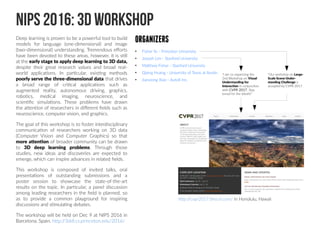
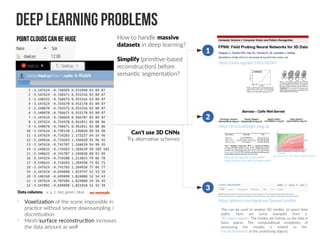
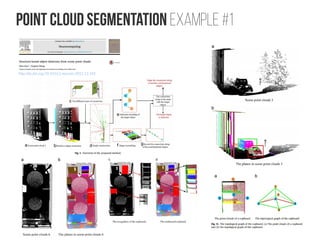
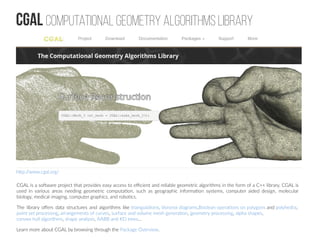
![Point cloud Segmentation Introduction
http://dx.doi.org/10.1016/j.cag.2015.11.003
There are three kinds of methods for point cloud segmentation [14]. The first
type is based on primitive fitting [3], [15] and [5]. It is hard for these methods
to deal with objects with complex shape.
The second kind of techniques is the region growing method. Nan et al. [2]
propose a controlled region growing process which searches for meaningful
objects in the scene by accumulating surface patches with high classification
likelihood. Berner et al. [16] detect symmetric regions using region growing.
Another line of methods formulates the point cloud segmentation as a Markov
Random Field (MRF) or Conditional Random Field (CRF) problem [4], [17] and
[14]. A representative random field segmentation method is the min-cut
algorithm [17]. The method extracts foreground from background through
building a KNN graph over which min-cut is performed. The shortcoming of
min-cut algorithm is that the selection of seed points relies on human
interaction. We extend the min-cut algorithm by first generating a set of object
hypotheses via multiple binary min-cuts and then selecting the most probable
ones based on a voting scheme, thus avoiding the seed selection.
Plane extraction from the point cloud
of a tabletop scene by using our
method (a) and RANSAC based
primitive fitting (b), respectively.
While our method can segment out
the supporting plane accurately,
RANSAC missed some points due to
the thin objects.
An overview of our algorithm. We first over-segment the scene and extract the supporting
plane on the patch graph, then segment the scene into segments and represent the whole
scene using a segment graph (a). To obtain the contextual information, we train a set of
classifiers for both single objects and object groups using multiple kernel learning (b). The
classifiers are used to group the segments into objects or object groups (c).](https://image.slidesharecdn.com/petteri-indoorpointcloudprocessing-170322134125/85/Indoor-Point-Cloud-Processing-Deep-learning-for-semantic-segmentation-of-indoor-point-clouds-43-320.jpg)
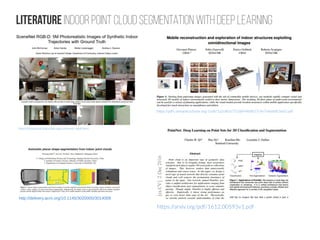
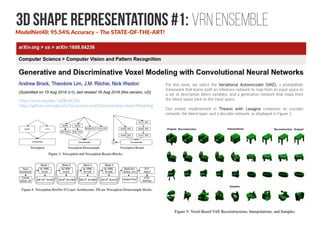
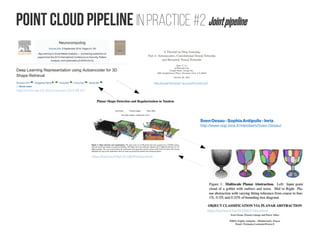
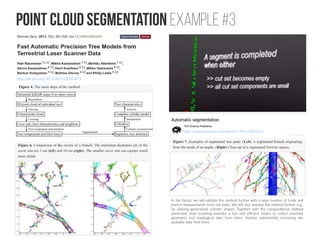
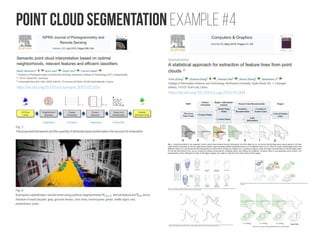
![Point cloud Segmentation Example #2
http://dx.doi.org/10.1109/TGRS.2016.255154
6
Principal component analysis (PCA)-based local saliency features,
e.g., normal and curvature, have been frequently used in many
ways for point cloud segmentation.
However, PCA is sensitive to outliers; saliency features from
PCA are non-robust and inaccurate in the presence of outliers;
consequently, segmentation results can be erroneous and
unreliable. As a remedy, robust techniques, e.g., RANdom
SAmple Consensus (RANSAC), and/or robust versions of PCA
(RPCA) have been proposed. However RANSAC is influenced by
the well-known swamping effect, and RPCA methods are
computationally intensive for point cloud processing.
We propose a region growing based robust segmentation
algorithm that uses a recently introduced maximum consistency
with minimum distance based robust diagnostic PCA (RDPCA)
approach to get robust saliency features.
Many methods have been developed to improve the quality of
segmentation in PCD that can be grouped into three main
categories: 1) edge/border based; 2) region growing based; and 3)
hybrid. In edge/border based methods, points on edges/ borders are
detected, a border linkage process constructs the continuous
edge/border, and then points are grouped within the identified
boundaries and connected edges. Castillo et al. [14] stated that, due
to noise or uneven point distributions, such methods often detect
disconnected edges, which make it difficult for a filling or an
interpretation procedure to identify closed segments.](https://image.slidesharecdn.com/petteri-indoorpointcloudprocessing-170322134125/85/Indoor-Point-Cloud-Processing-Deep-learning-for-semantic-segmentation-of-indoor-point-clouds-45-320.jpg)
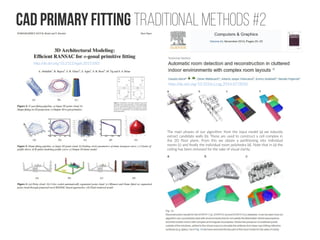
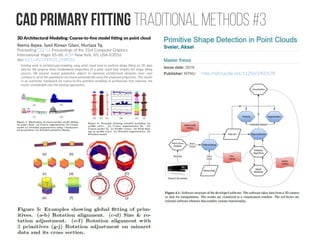
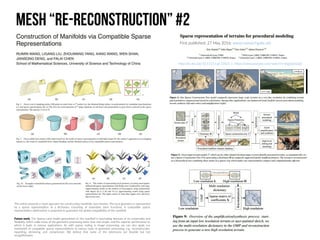
![Cad Primary fitting traditional methods #1
http://dx.doi.org/10.1111/j.1467-8659.2007.01016.x; Cited by 680 http://dx.doi.org/10.1111/j.1467-8659.2009.01389.x; Cited by 63
[SDK09][SWK07]
http://dx.doi.org/10.1111/cgf.12802](https://image.slidesharecdn.com/petteri-indoorpointcloudprocessing-170322134125/85/Indoor-Point-Cloud-Processing-Deep-learning-for-semantic-segmentation-of-indoor-point-clouds-48-320.jpg)

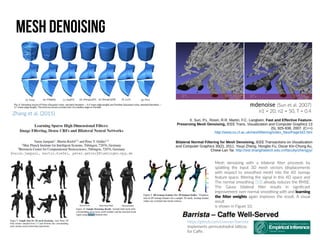
![Mesh Simplification
Huang et al. 2013
http://web.siat.ac.cn/~huihuang/EAR/EAR_page.html
CGAL, Point Set Processing
http://doc.cgal.org/latest/Point_set_processing_3/
Wei et al. (2015)
Borouchaki and Frey (2005)
QSlim Simplification Software, http://www.cs.cmu.edu/~./garland/quadrics/qslim.html
Monette-Theriault (2014): “he Matlab wrapper of QSlim is adapted from [19] and the same platform
is ... Using the initial mesh as a reference”](https://image.slidesharecdn.com/petteri-indoorpointcloudprocessing-170322134125/85/Indoor-Point-Cloud-Processing-Deep-learning-for-semantic-segmentation-of-indoor-point-clouds-56-320.jpg)

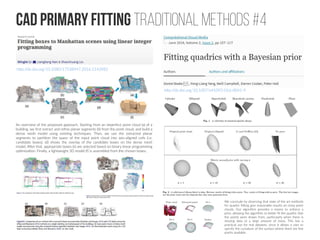
This document discusses using deep learning techniques for semantic segmentation of indoor point clouds. It provides an overview of initial ideas for using deep learning models trained on 3D CAD models to classify and label points in an indoor point cloud. It also discusses pre-processing the point cloud through techniques like denoising, upsampling, and finding planar surfaces to simplify the input before semantic segmentation. The order of semantic segmentation and 3D reconstruction is noted as something that could potentially be swapped.










![[3D勉強会@関東] Deep Reinforcement Learning of Volume-guided Progressive View Inpa...](https://cdn.slidesharecdn.com/ss_thumbnails/201908313dmeeting-190831035350-thumbnail.jpg?width=640&height=640&fit=bounds)
![[論文紹介] BlendedMVS: A Large-scale Dataset for Generalized Multi-view Stereo Ne...](https://cdn.slidesharecdn.com/ss_thumbnails/blendedmvsslideshare-200630044345-thumbnail.jpg?width=640&height=640&fit=bounds)










![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS3] 広域環境の3D計測と認識 ~ 人が活動する場のセンシングとモデル化 ~(オーガナイザーによる冒頭の導入)](https://cdn.slidesharecdn.com/ss_thumbnails/os3-01-210605061816-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Variational Autoencoder with Arbitrary Conditioning](https://cdn.slidesharecdn.com/ss_thumbnails/190412nonakadlhacksv2-190422075347-thumbnail.jpg?width=640&height=640&fit=bounds)









![[DSC 2016] 系列活動:李宏毅 / 一天搞懂深度學習](https://cdn.slidesharecdn.com/ss_thumbnails/1-160521014039-thumbnail.jpg?width=640&height=640&fit=bounds)
















![[NS][Lab_Seminar_240611]Graph R-CNN.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/nslabseminar240611graphr-cnn-240704112605-f42276be-thumbnail.jpg?width=640&height=640&fit=bounds)





















