Downloaded 167 times











![- 物体表面での光のふるまいをモデル化
鏡面反射
拡散反射
表面下散乱
屈折・透過
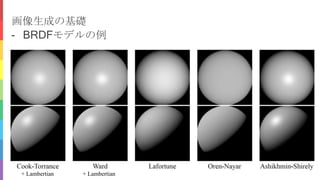
• BRDF(反射)
• BTDF(透過)
• BSDF(反射+透過)
• BSSRDF(散乱面反射)
Bidirectional [X] Distribution Function
BSDFとBSSRDFの違い
BSDFはあくまでも単一点における反射方向における光の割合を表したもの
BSSRDFは異なる2点間での関係性を示したもの
画像生成の基礎](https://image.slidesharecdn.com/ts1-200605045326/85/SSII2020TS-16-320.jpg)
























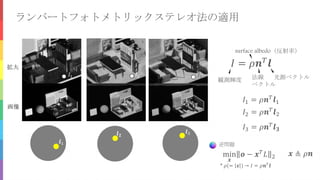
![ランバートフォトメトリックステレオ法の適用(結果)
復元された法線 復元された反射
率
参考入力画像
*法線のカラーマッピング 127 * ([nx, ny, nz] +
1)](https://image.slidesharecdn.com/ts1-200605045326/85/SSII2020TS-46-320.jpg)


























SSII2020 チュートリアルセッション TS1 6/10 (水) 9:45~10:55 メイン会場 (vimeo + sli.do) 物理ベースビジョンとは、画像生成を物理・光学現象として捉え、それに基づいて画像から被写体の形状や材質を復元するコンピュータビジョンの一分野である。代表的なものには、1枚の陰影画像から被写体の形状を復元するシェープフロムシェーディング法や複数枚の陰影画像を利用するフォトメトリックステレオ法がある。本チュートリアルでは、1980年代から存在する物理ベースビジョンの基本的な考え方と基礎技術、および近年の研究動向について解説する。









![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Neural Radiance Flow for 4D View Synthesis and Video Processing (NeRF...](https://cdn.slidesharecdn.com/ss_thumbnails/20210806journalclub-210806023711-thumbnail.jpg?width=640&height=640&fit=bounds)





![SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...](https://cdn.slidesharecdn.com/ss_thumbnails/ss1-01-210607043349-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]A Higher-Dimensional Representation for Topologically Varying Neural R...](https://cdn.slidesharecdn.com/ss_thumbnails/ahigher-dimensionalrepresentationfortopologicallyvaryingneuralradiancefields1-210924021911-thumbnail.jpg?width=640&height=640&fit=bounds)








![SSII2020 [O3-01] Extreme 3D センシング](https://cdn.slidesharecdn.com/ss_thumbnails/200612-ssii-extreme3dsensing-print3-200608114658-thumbnail.jpg?width=640&height=640&fit=bounds)

















![SSII2022 [OS2-01] イメージング最前線](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os2-1-220607020403-b550c379-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [TS2] 自律移動ロボットのためのロボットビジョン〜 オープンソースの自動運転ソフトAutowareを解説 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2ssii2022r4-220607054405-1c6b5fc2-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [TS3] コンテンツ制作を支援する機械学習技術〜 イラストレーションやデザインの基礎から最新鋭の技術まで 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts32022ssiiess-220607054523-e80be8dc-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [OS3-04] Human-in-the-Loop 機械学習](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os3-04-220607021031-e69700d5-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [TS3] 機械学習のアノテーションにおける データ収集 〜 精度向上のための仕組み・倫理や社会性バイアス 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts3-01-210607043121-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法](https://cdn.slidesharecdn.com/ss_thumbnails/os2-02final-210610091211-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [OS3-01] 深層学習のための効率的なデータ収集と活用](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os3-01-220607020740-e80781dc-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss2ssii2022-220607054716-2760bd30-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [OS3-03] スケーラブルなロボット学習システムに向けて](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os3-03-220607020929-1e2b15e8-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [OS3-02] Federated Learningの基礎と応用](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os3-02-220607020834-2b5f93ff-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS3-01] 設備や環境の高品質計測点群取得と自動モデル化技術](https://cdn.slidesharecdn.com/ss_thumbnails/os3-02-210605062048-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [TS2] 深層強化学習 〜 強化学習の基礎から応用まで 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2-01-210607042910-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [OS1-01] AI時代のチームビルディング](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os1-01-220607015404-49188612-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向](https://cdn.slidesharecdn.com/ss_thumbnails/os2-03latest-210610045610-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS3-02] BIM/CIMにおいて安価に点群を取得する目的とその利活用](https://cdn.slidesharecdn.com/ss_thumbnails/os3-03-210605062350-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS3-03] 画像と点群を用いた、森林という広域空間のゾーニングと施業管理](https://cdn.slidesharecdn.com/ss_thumbnails/os3-04-210605062524-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [SS2] Deepfake Generation and Detection – An Overview (ディープフェイクの生成と検出)](https://cdn.slidesharecdn.com/ss_thumbnails/ss2-01-210607043612-thumbnail.jpg?width=640&height=640&fit=bounds)












