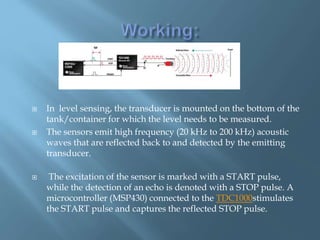
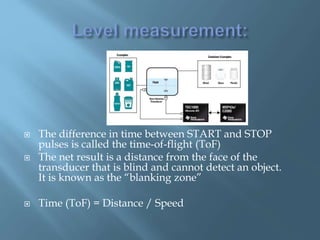
This document discusses ultrasonic level sensing using transducers that emit high frequency acoustic waves and measure the time-of-flight of reflected echoes to determine the distance to the surface of a liquid. It describes the basic working involving excitation of a start pulse and detection of a stop pulse, with the time difference providing the time-of-flight and corresponding distance. It also mentions that there is a blanking zone near the transducer face where objects cannot be detected. Finally, it notes this technology is used for level sensing in tanks, containers, and various industrial equipment.