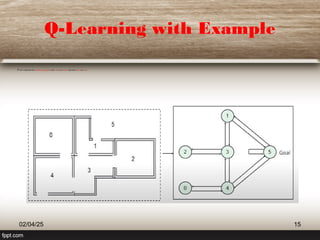
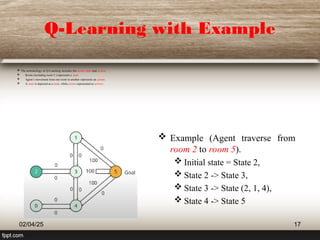
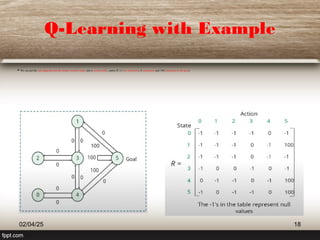
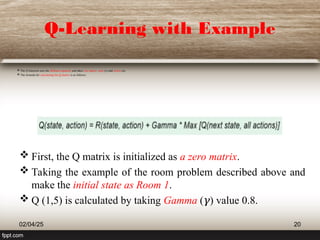
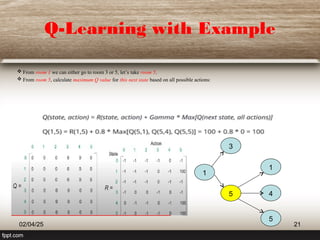
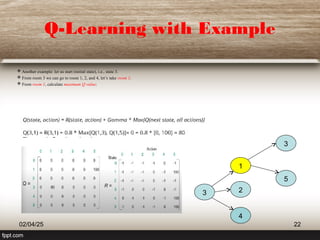
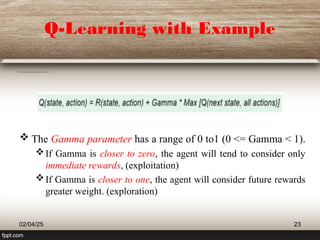
The document outlines the principles of reinforcement learning, a subset of machine learning where an agent learns behavior through interaction with an environment. Key components include the agent, environment, actions, states, and rewards, with a focus on maximizing rewards through exploration and exploitation. The document also explains q-learning, a value-based algorithm used for determining optimal action-selection policy, illustrated with examples such as navigating rooms with associated rewards.





















![Q-Learning Algorithm: A Concise Introduction [Shakeeb A.]](https://cdn.slidesharecdn.com/ss_thumbnails/q-learningshakeebabuzarmustafasneha-200921155609-thumbnail.jpg?width=640&height=640&fit=bounds)