Downloaded 77 times






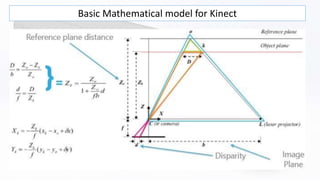
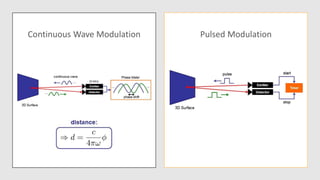
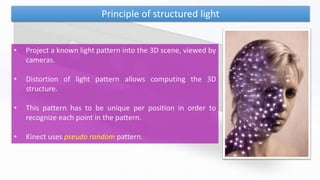
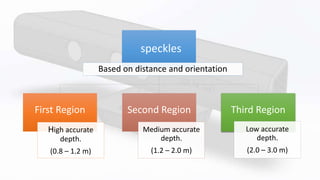
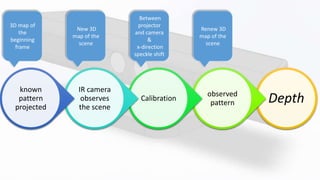

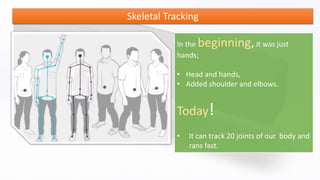
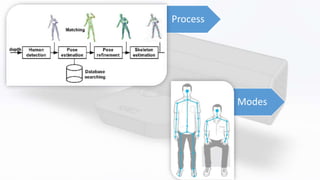

The Kinect sensor is an input device by Microsoft that uses cameras and microphones to track body movements and recognize gestures and voices. It consists of an RGB camera, depth sensor using infrared light, and 4-microphone array. The depth sensor uses structured light to measure distances by projecting a pattern and analyzing its distortion. Kinect can track up to 20 joints of the human body in real-time using skeletal tracking. It has applications in 3D scanning, sign language translation, augmented reality, robot control, and virtual fitting rooms due to its low-cost depth sensing capabilities.








































































