Download to read offline


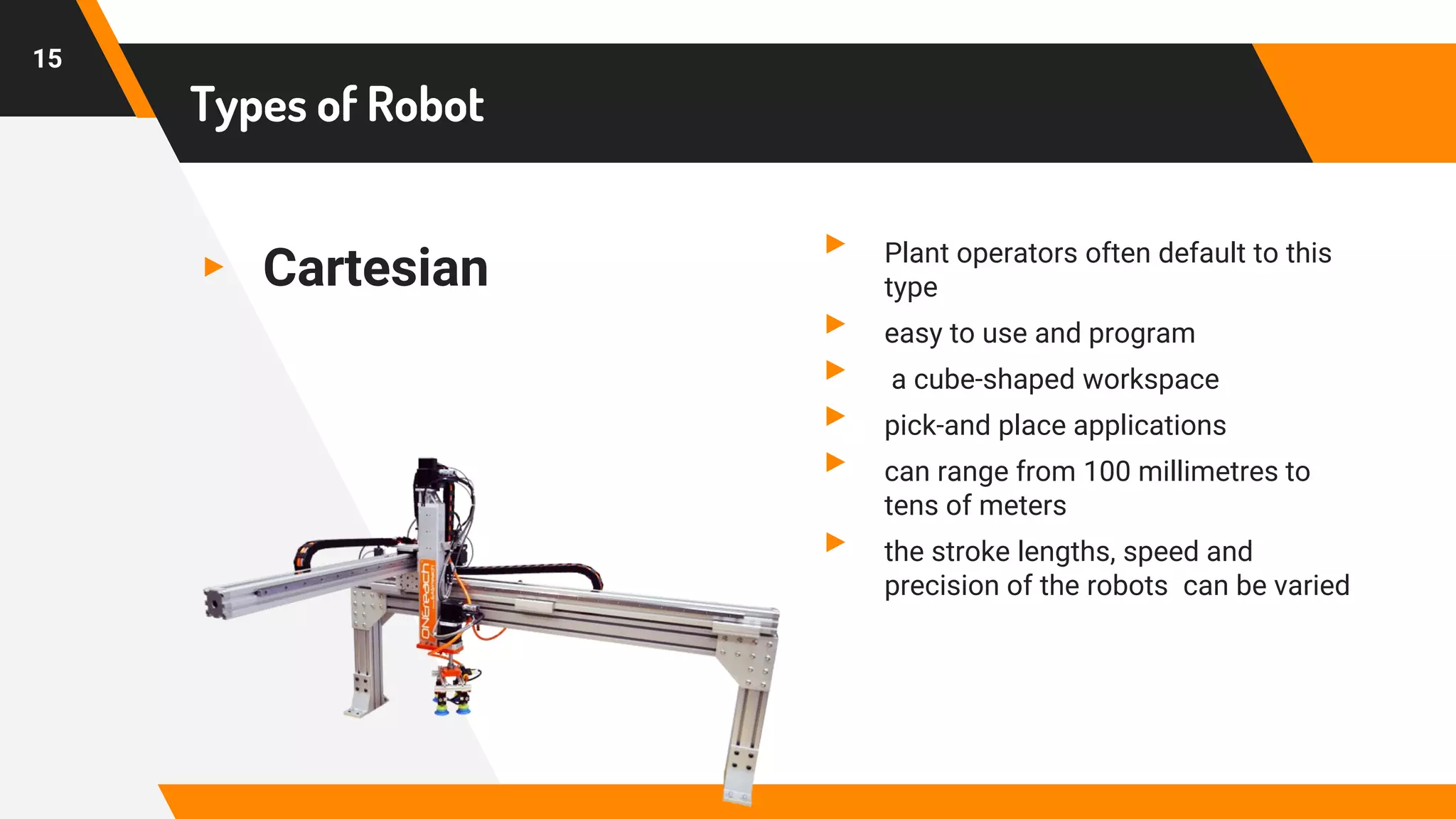
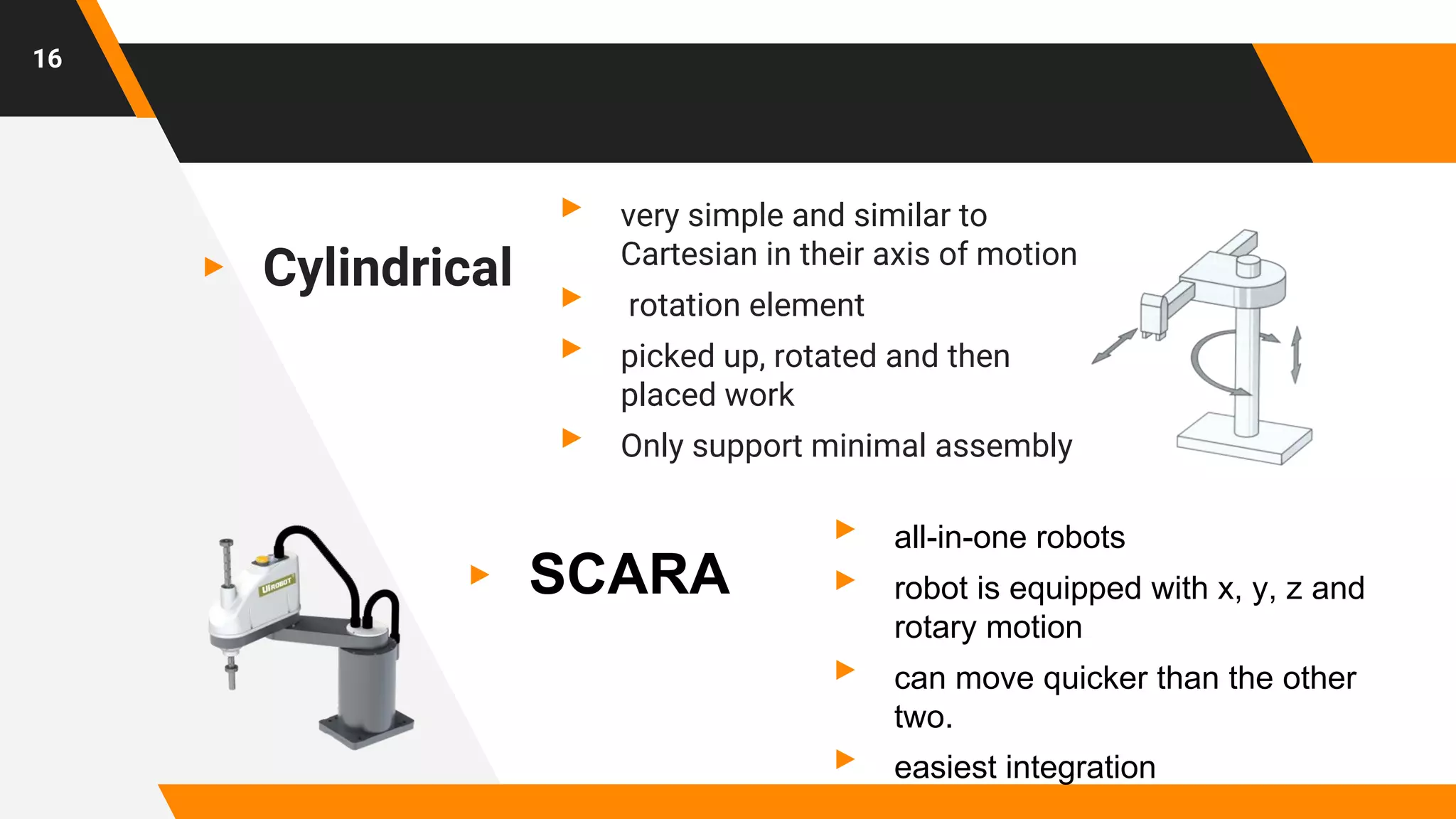
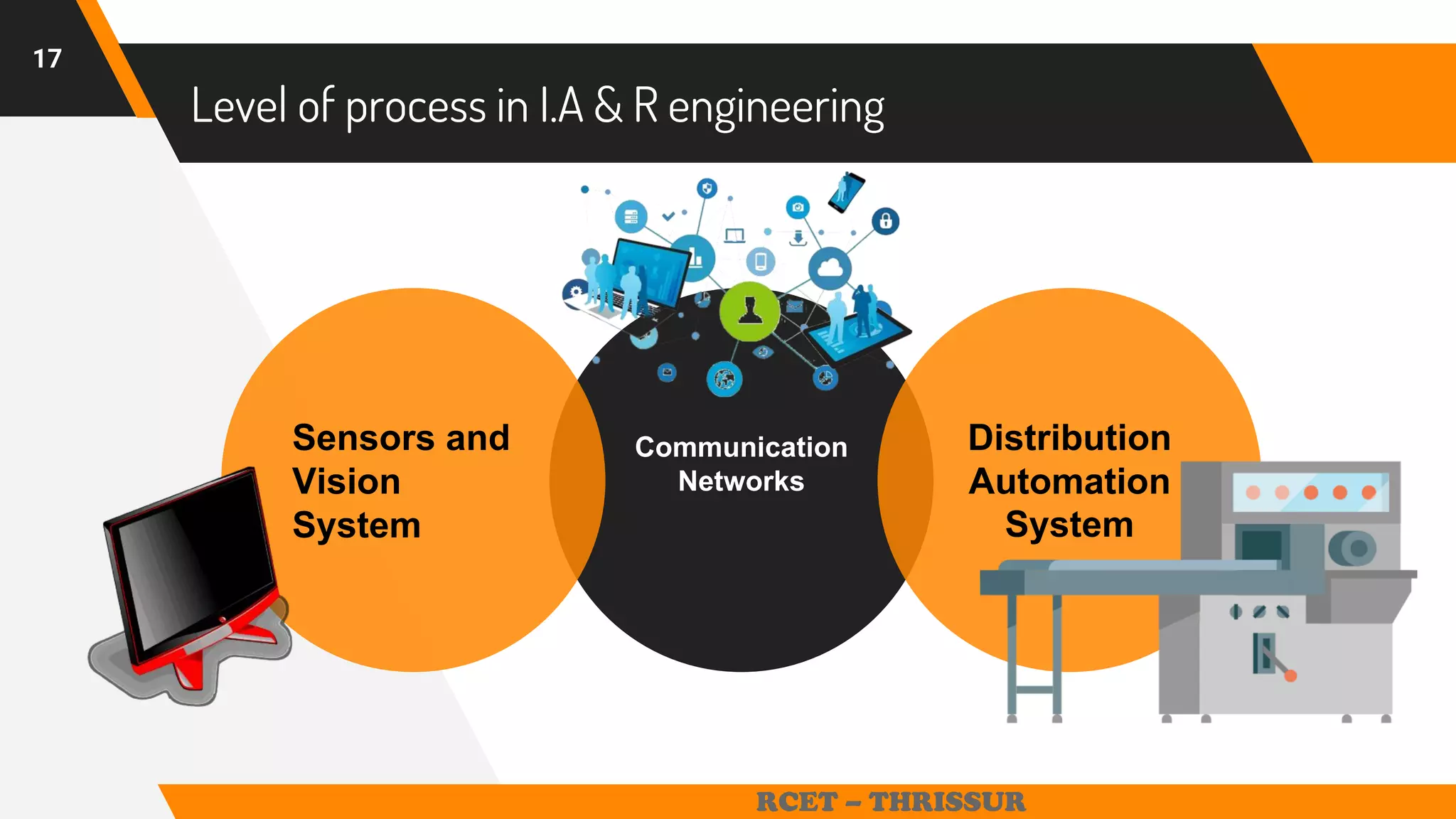
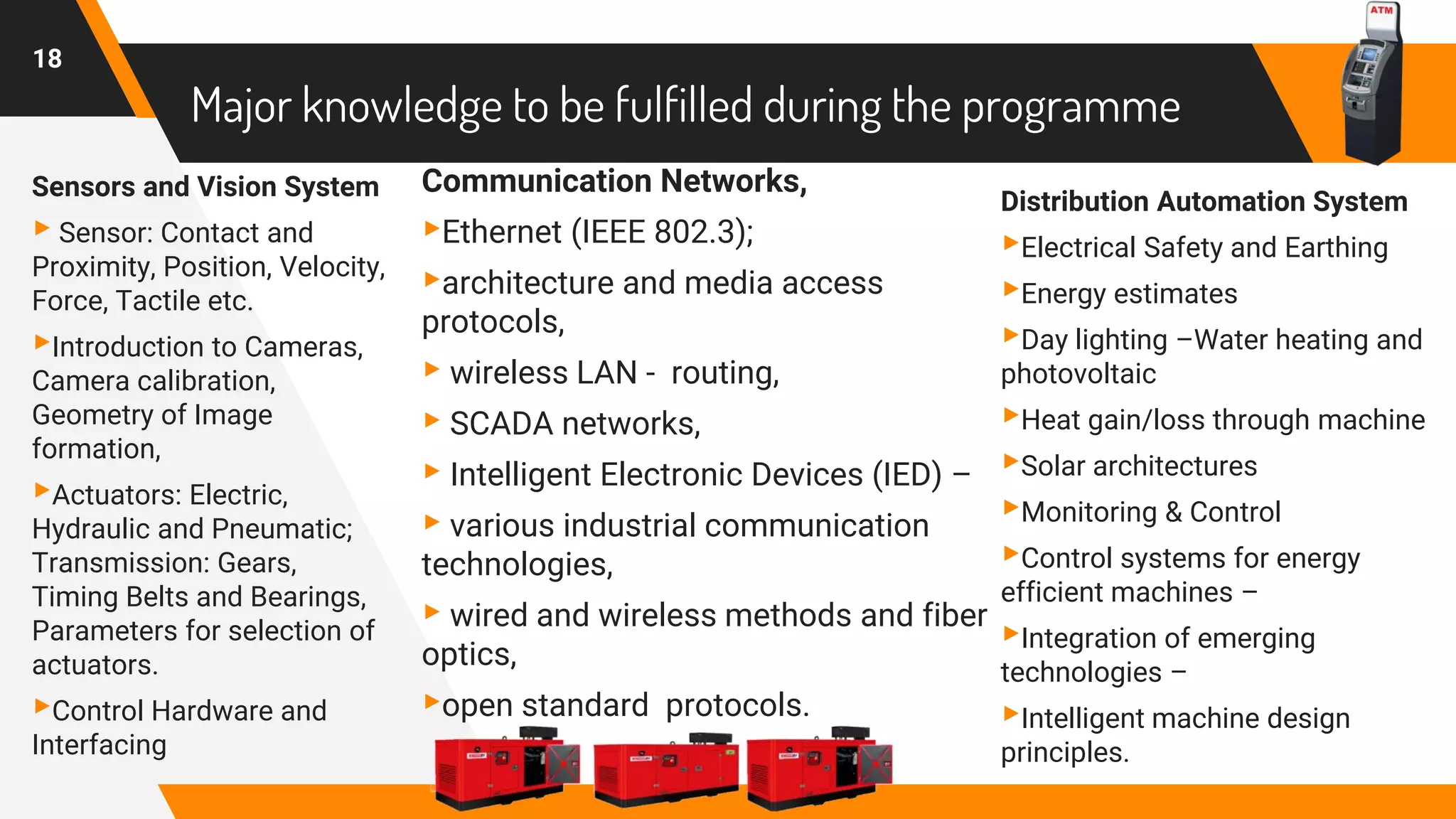
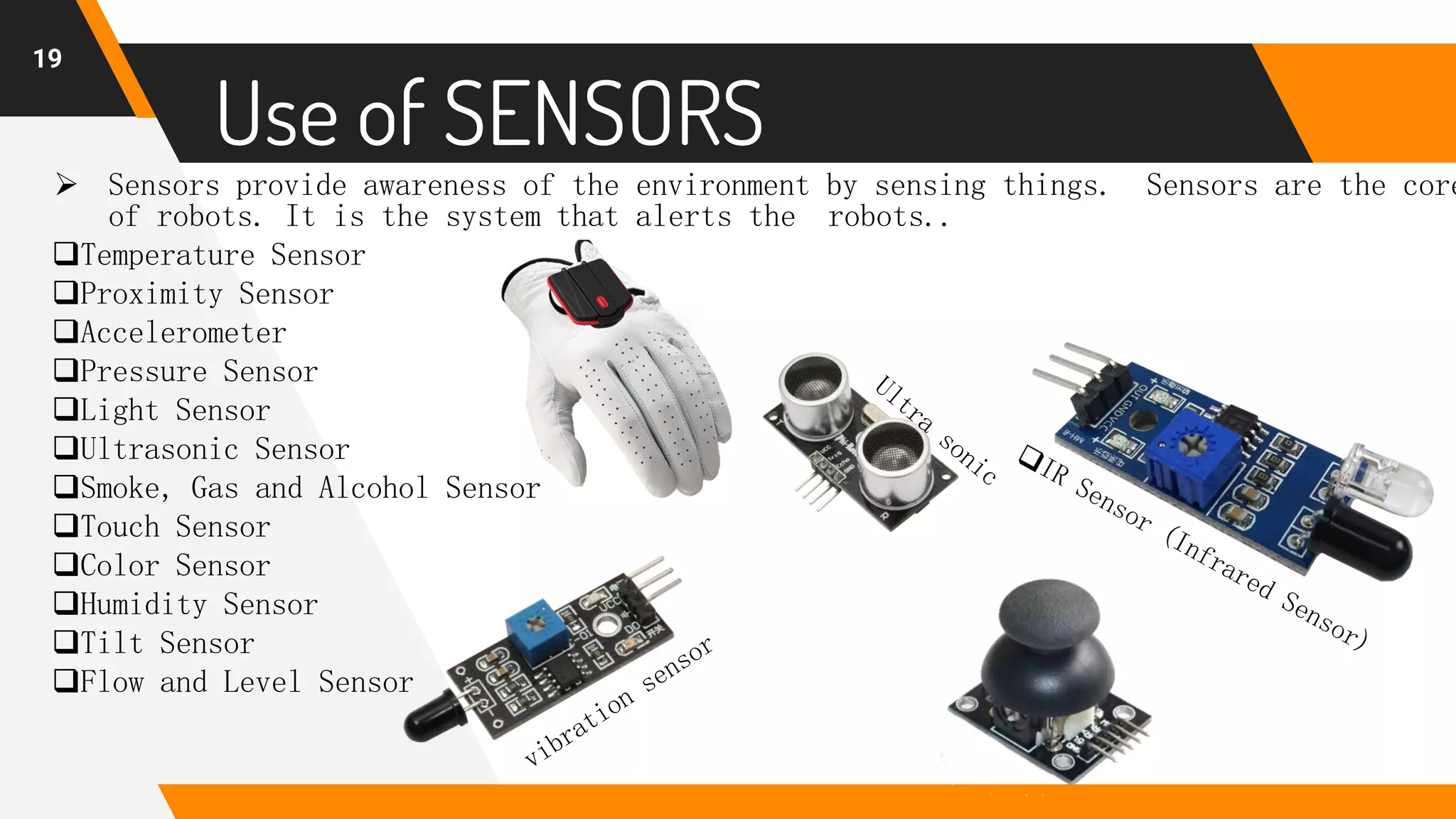
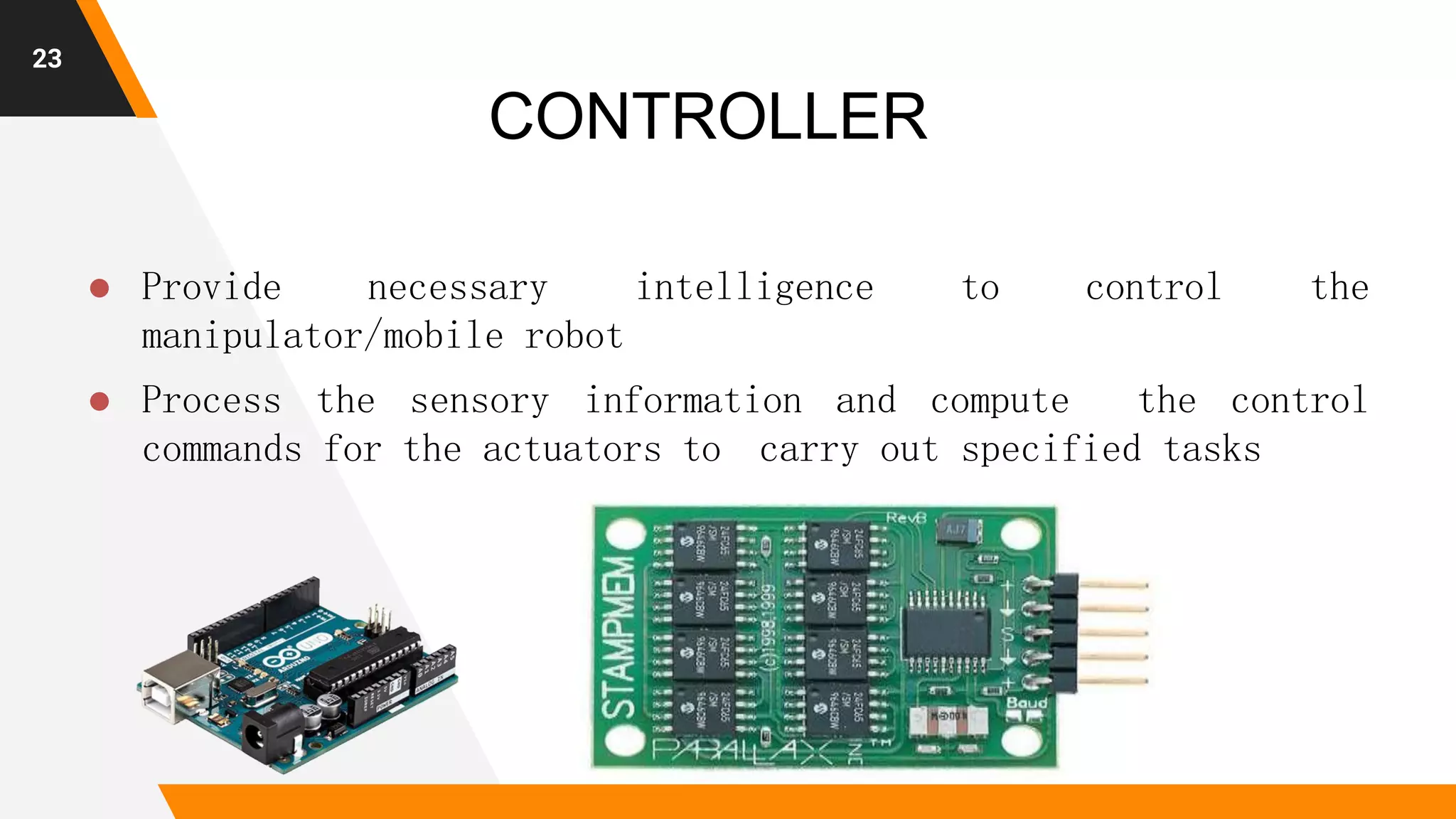





This document provides an overview of intelligent automation and robotics. It discusses the vision and mission of Royal College of Engineering & Technology in Thrissur, India. It then covers topics like the history of robotics, types of robots, automation processes, need for automation engineers, robot programming, sensors used in robots, and practical learning objectives for students in the field of robotics and intelligent automation.



























































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)






