1) The document discusses opportunities in the robotics field, including the robotics market, required skill sets, and popular robotic products.
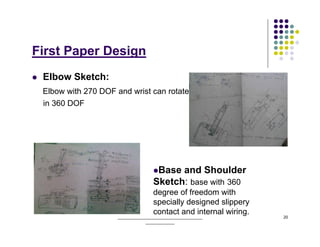
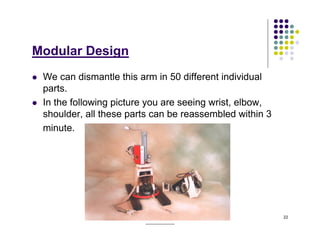
2) It describes the author's first robotic arm project, including modular design, pick and place demonstration, and hardware.
3) The author's vision is to design more advanced robotic arms and home service robots through opportunities that bring together a multi-disciplinary team with a common goal.