
More Related Content
What's hot
What's hot (20)
Similar to Inchworm motor.pptx
Similar to Inchworm motor.pptx (20)
Recently uploaded
Recently uploaded (20)
Inchworm motor.pptx
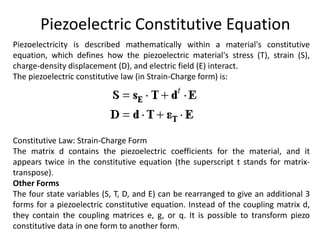
- 1. Piezoelectric Constitutive Equation Piezoelectricity is described mathematically within a material's constitutive equation, which defines how the piezoelectric material's stress (T), strain (S), charge-density displacement (D), and electric field (E) interact. The piezoelectric constitutive law (in Strain-Charge form) is: Constitutive Law: Strain-Charge Form The matrix d contains the piezoelectric coefficients for the material, and it appears twice in the constitutive equation (the superscript t stands for matrix- transpose). Other Forms The four state variables (S, T, D, and E) can be rearranged to give an additional 3 forms for a piezoelectric constitutive equation. Instead of the coupling matrix d, they contain the coupling matrices e, g, or q. It is possible to transform piezo constitutive data in one form to another form.
- 2. Piezo Symbol Definitions Following is a description of all matrix variables used in the piezoelectric constitutive equations.
- 3. Hooke's Law and Dielectrics • What is a constitutive equation? For mechanical problems, a constitutive equation describes how a material strains when it is stressed, or vice-versa. Constitutive equations exist also for electrical problems; they describe how charge moves in a (dielectric) material when it is subjected to a voltage, or vice- versa. • Engineers are already familiar with the most common mechanical constitutive equation that applies for everyday metals and plastics. This equation is known as Hooke's Law and is written as: • In words, this equation states: Strain = Compliance × Stress. • However, since piezoelectric materials are concerned with electrical properties too, we must also consider the constitutive equation for common dielectrics: • In words, this equation states: ChargeDensity = Permittivity × ElectricField.
- 4. Coupled Equation • Piezoelectric materials combine these two seemingly dissimilar constitutive equations into one coupled equation, written as: • The piezoelectric coupling terms are in the matrix d. • In order to describe or model piezoelectric materials, one must have knowledge about the material's mechanical properties (compliance or stiffness), its electrical properties (permittivity), and its piezoelectric coupling properties. Matrix Subscript Definitions • The subscripts in piezoelectric constitutive equations have very important meanings. They describe the conditions under which the material property data was measured. • For example, the subscript E on the compliance matrix sE means that the compliance data was measured under at least a constant, and preferably a zero, electric field. • Likewise, the subscript T on the permittivity matrix eT means that the permittivity data was measured under at least a constant, and preferably a zero, stress field.
- 10. Operation • The actuation process of the inchworm motor is a six step cyclical process after the initial relaxation and initialization phase. Initially, all three piezos are relaxed and unextended. To initialize the inchworm motor the clutching piezo closest to the direction of desired motion (which then becomes the forward clutch piezo) is electrified first then the six step cycle begins as follows (see Figure): • Step 1. Extension of the lateral piezo. • Step 2. Extension of the aft clutch piezo. • Step 3. Relaxation of the forward clutch piezo. • Step 4. Relaxation of the lateral piezo. • Step 5. Extension of the forward clutch piezo. • Step 6. Relaxation of the aft clutch piezo.
- 11. • Electrification of the piezo actuators is accomplished by applying a high bias voltage to the actuators in step according to the "Six Step" process described above. • To move long distances the sequence of six steps is repeated many times in rapid succession. Once the motor has moved sufficiently close to the desired final position, the motor may be switched to an optional fine positioning mode. • In this mode, the clutches receive constant voltage (one high and the other low), and the lateral piezo voltage is then adjusted to an intermediate value, under continuous feedback control, to obtain the desired final position.
- 12. Applications • The inchworm motor is commonly used in scanning tunneling microscopes (STMs). • An STM requires nanometer scale control of its scanning tip near the material it is observing. • This control can be accomplished by connecting the scanning tip to the shaft of the inchworm motor. • The inchworm motor, in turn, allows control in a direction normal to the plane of the observed material's surface. • Movement across the surface is commonly referred to as movement in the x-y plane, whereas movement normal to the surface is commonly referred to as movement in the z-direction. • Movement of the scanning tip by the inchworm motor is either manually controlled or automatically controlled by connecting the motor to a feedback system.
- 13. Patch Clamping • The inchworm motor can be used in the patch clamping of biological cells. • This technique is most often performed with an optical microscope and micromanipulator holding a glass pipette. • The inchworm motor is particularly ideal in patch clamping because it provides the operator with virtually an instantaneous, precise, smooth and predictable motion without drift.
- 14. • Piezoelectric inchworm actuators have a wide application in the field of nano-positioning and ultra-precision detecting instruments. • Ultra-precision positioning equipments are urgently needed in the field of precision optics. • A new piezoelectric linear actuator, based on inchworm motion principle, with a symmetry lever displacement amplification mechanism has been designed. • The whole structure adopts uniaxial-type double-notch right circular flexible hinge as its main hinges, which offers the driving part a larger displacement and makes clamping part have enough clamping force at the same time. • High-precision cross roller guide ways are utilized to improve the positioning accuracy of the actuator. Both theoretical analysis and finite element analysis of clamping mechanism and driving mechanism have been carried out. • An experimental test platform has been built, and a controlling program of the actuator is compiled by LabVIEW. • The experimental results show that the working stroke of the actuator is ± 25 mm, resolution is 60 nm, the clamping force is 17 N, and the bearing capacity is 11 N; the actuator has a highest speed of 1.259 mm/s at the driving voltage 150 V.