Downloaded 283 times


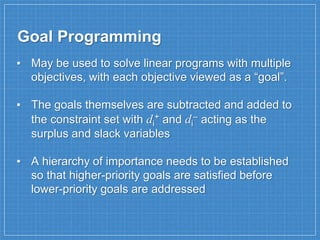

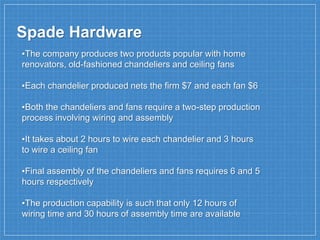
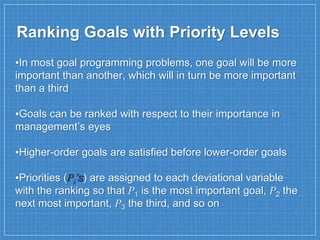
![LP Formulation
[Maximize Profit]
Z = 7x1 + 6x2
[Subject To]
2x1 + 3x2 <= 12 (Wiring Hours)
6x1 + 5x2 <= 30 (Assembly Hours)
x1,x2 >= 0
[Let]
x1 = # of chandeliers produced
x2 = # of ceiling fans produced](https://image.slidesharecdn.com/goalprogramming-150911073618-lva1-app6891/85/Goal-Programming-8-320.jpg)
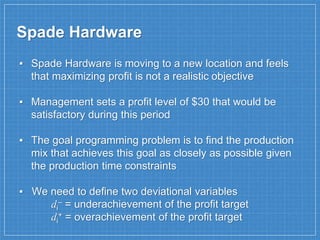
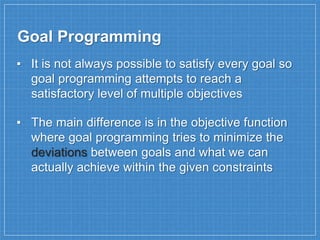
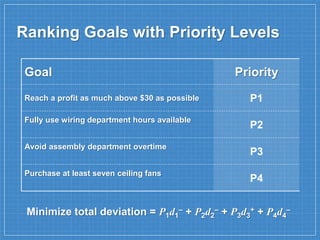
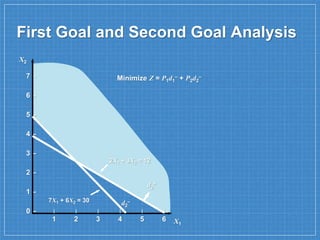
![[Minimize Total Deviation]
d1
– + d2
– + d3
+ + d4
–
[Subject To]
7x1 + 6x2 + d1
– – d1
+ = 30 (Profit Constraint)
2x1 + 3x2 + d2
– – d2
+ = 12 (Wiring Hours)
6x1 + 5x2 + d3
– – d3
+ = 30 (Assembly Hours)
x2 + d4
– – d4
+ = 7 (Ceiling Fan Constraint)
All xi,di variables >= 0
GP Model](https://image.slidesharecdn.com/goalprogramming-150911073618-lva1-app6891/85/Goal-Programming-12-320.jpg)
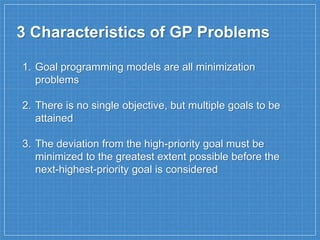
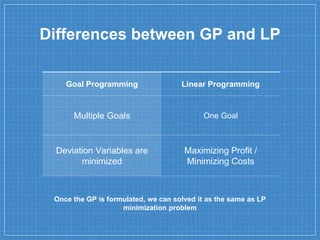
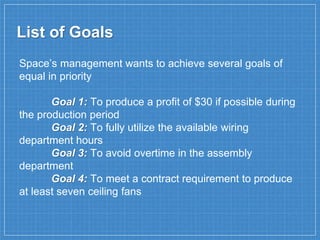
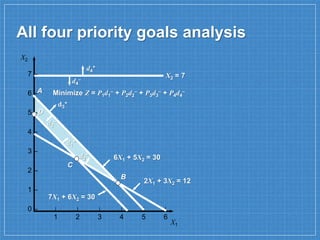
![[Minimize Total Deviation]
P1d1
– + P2d2
– + P3d3
+ + P4d4
–
[Subject To]
7x1 + 6x2 + d1
– – d1
+ = 30 (Profit Constraint)
2x1 + 3x2 + d2
– – d2
+ = 12 (Wiring Hours)
6x1 + 5x2 + d3
– – d3
+ = 30 (Assembly Hours)
x2 + d4
– – d4
+ = 7 (Ceiling Fan Constraint)
All xi,di variables >= 0
Recalling GP Model](https://image.slidesharecdn.com/goalprogramming-150911073618-lva1-app6891/85/Goal-Programming-16-320.jpg)
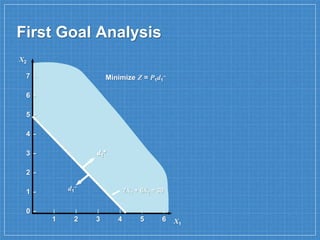
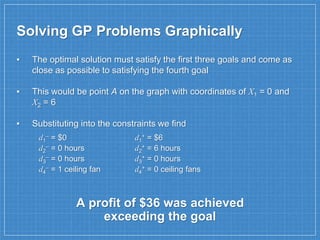


The document discusses goal programming, which is used to solve linear programs with multiple objectives viewed as goals. It describes goal programming as attempting to reach a satisfactory level of multiple objectives by minimizing deviations between goals and what can actually be achieved given constraints. An example problem involves a hardware company with goals of achieving a $30 profit, fully utilizing wiring hours, avoiding assembly overtime, and producing at least 7 ceiling fans. The goal programming model for this problem is formulated and graphically solved to satisfy the higher priority goals as closely as possible before lower goals.


































































![제 23회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [MBOAX] : ABSA를 활용한 소비자 반응 분석 기반 운영 효율화 대시보드 설계](https://cdn.slidesharecdn.com/ss_thumbnails/3-1boaz23rdconferencemboax-260203102709-9d519923-thumbnail.jpg?width=640&height=640&fit=bounds)







