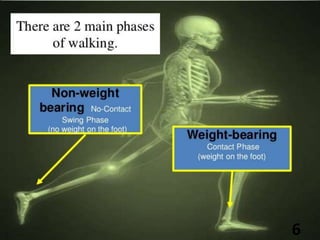
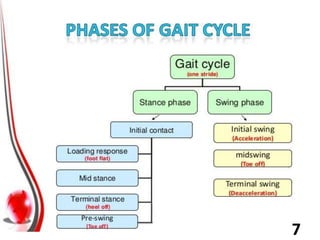
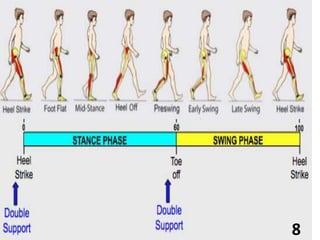
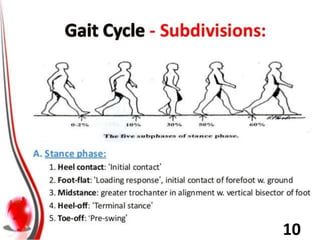
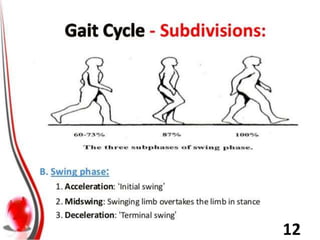
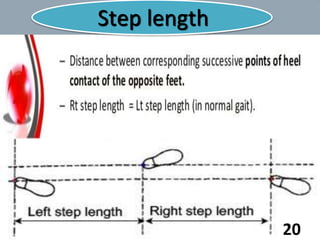
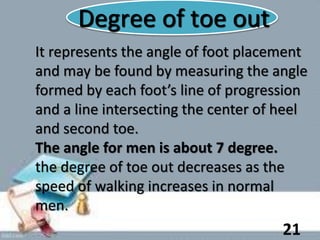
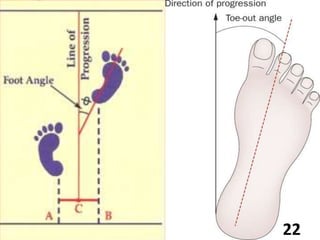
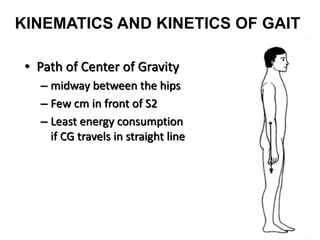
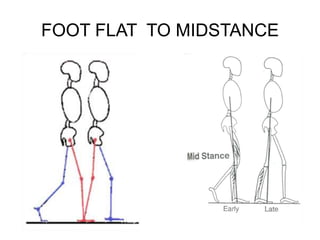
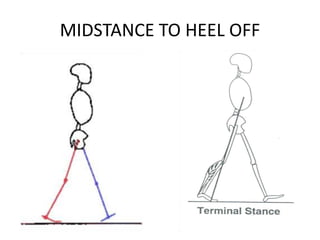
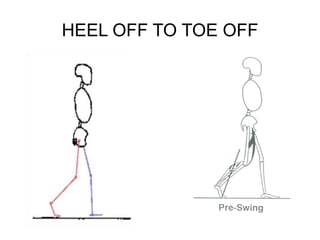
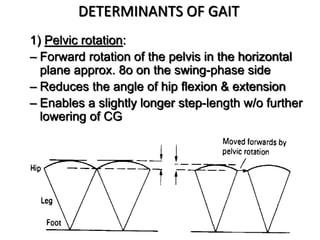
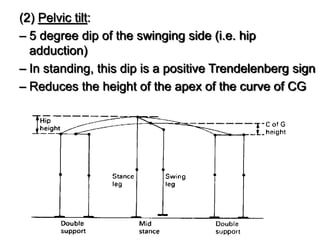
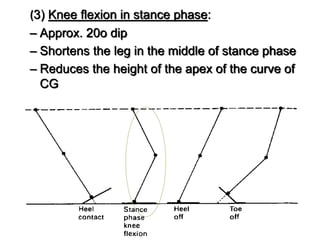
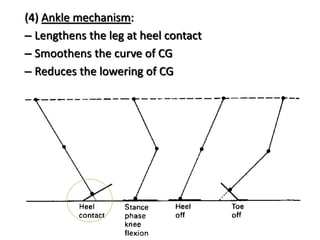
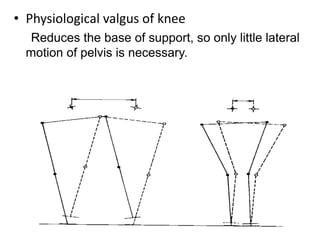
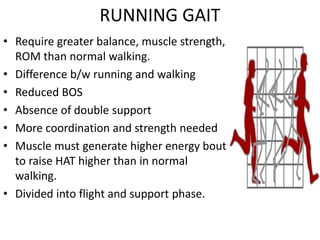
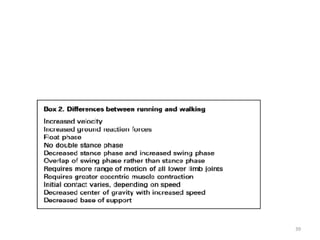
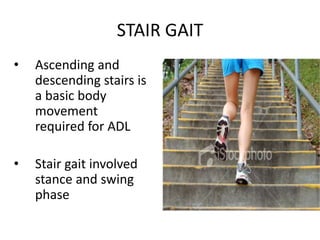
The document discusses gait and the gait cycle. It defines gait as a person's pattern of walking and notes walking patterns can differ between individuals. The gait cycle is defined as the period from one heel strike to the next heel strike of the same limb. The gait cycle consists of the stance phase, when the foot is on the ground, and the swing phase, when the foot is off the ground. Temporal and distance variables are used to analyze gait, including single limb support time, stride length, and degree of toe out. The document also reviews the kinematics and kinetics of normal gait.

































































![CASE_PRESENTATION_ON_subdural_hematoma(SDH)[1 FINAL PPT]-1.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/casepresentationonsubduralhematomasdh1finalppt-1-260129172522-d405d375-thumbnail.jpg?width=640&height=640&fit=bounds)









