Downloaded 153 times

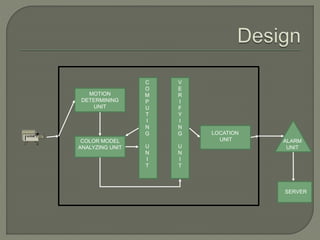
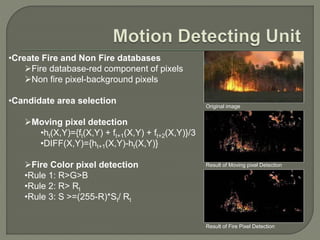
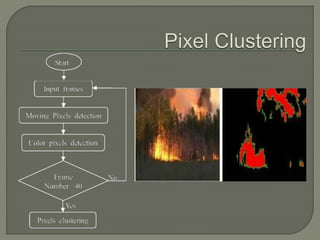
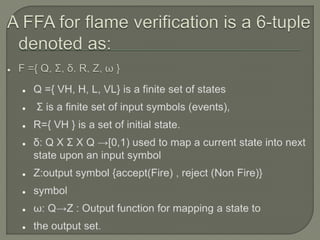
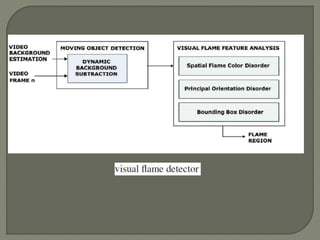
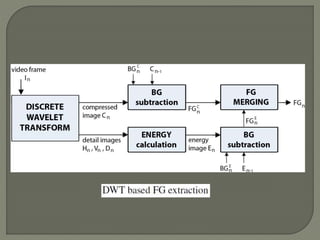
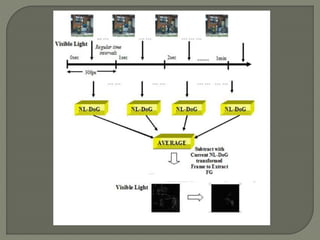

This document discusses the design and implementation of a fire detection system using computer vision. It proposes using a system with multiple units including a motion detecting unit, color analyzing unit, computing unit, verifying unit, location unit, and alarm unit. Different algorithms are considered for fire detection including color-based approaches, motion-based approaches, and approaches using fuzzy logic and hidden Markov models. The system is intended to automatically identify and locate fires as part of a larger surveillance system with benefits of being cheaper and more accurate than existing sensor-based solutions.