Download as PDF, PPTX
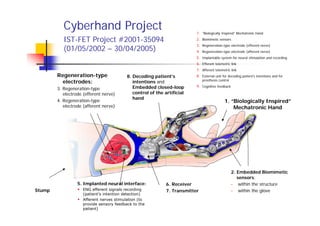
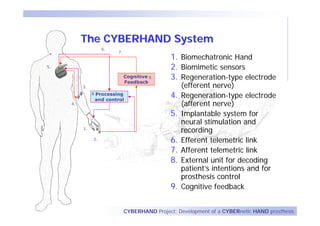
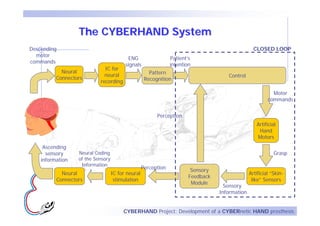
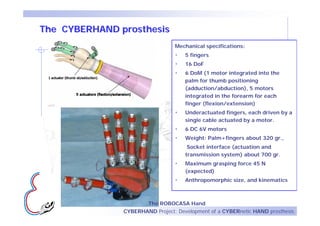
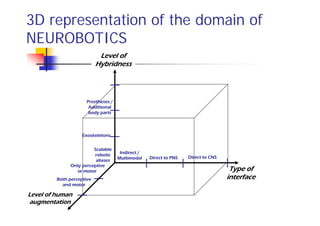
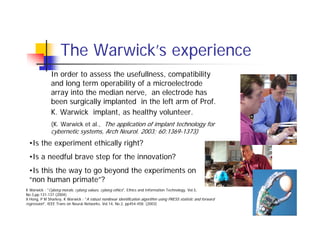



1. The document summarizes a workshop on robo-ethics that discussed two case studies: the CYBERHAND project developing a prosthetic hand connected to the nervous system, and the NEUROBOTICS project investigating hybrid bionic systems. 2. The CYBERHAND project aims to develop a prosthetic hand that provides natural sensory feedback through stimulation of afferent nerves and is controlled naturally by processing efferent neural signals. 3. The CYBERHAND system includes a biomechatronic hand, biomimetic sensors, regeneration electrodes for connecting to nerves, an implantable system for neural stimulation and recording, and an external unit for decoding intentions and controlling the prosthesis.
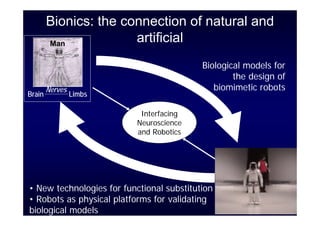
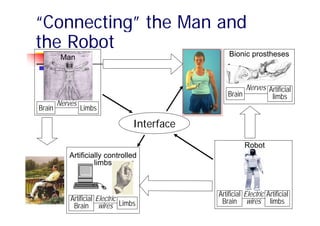
![[IJET-V1I5P6] Authors:M. Newlin Rajkumar, M. Lavanya](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v1i5p6-151022011423-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)