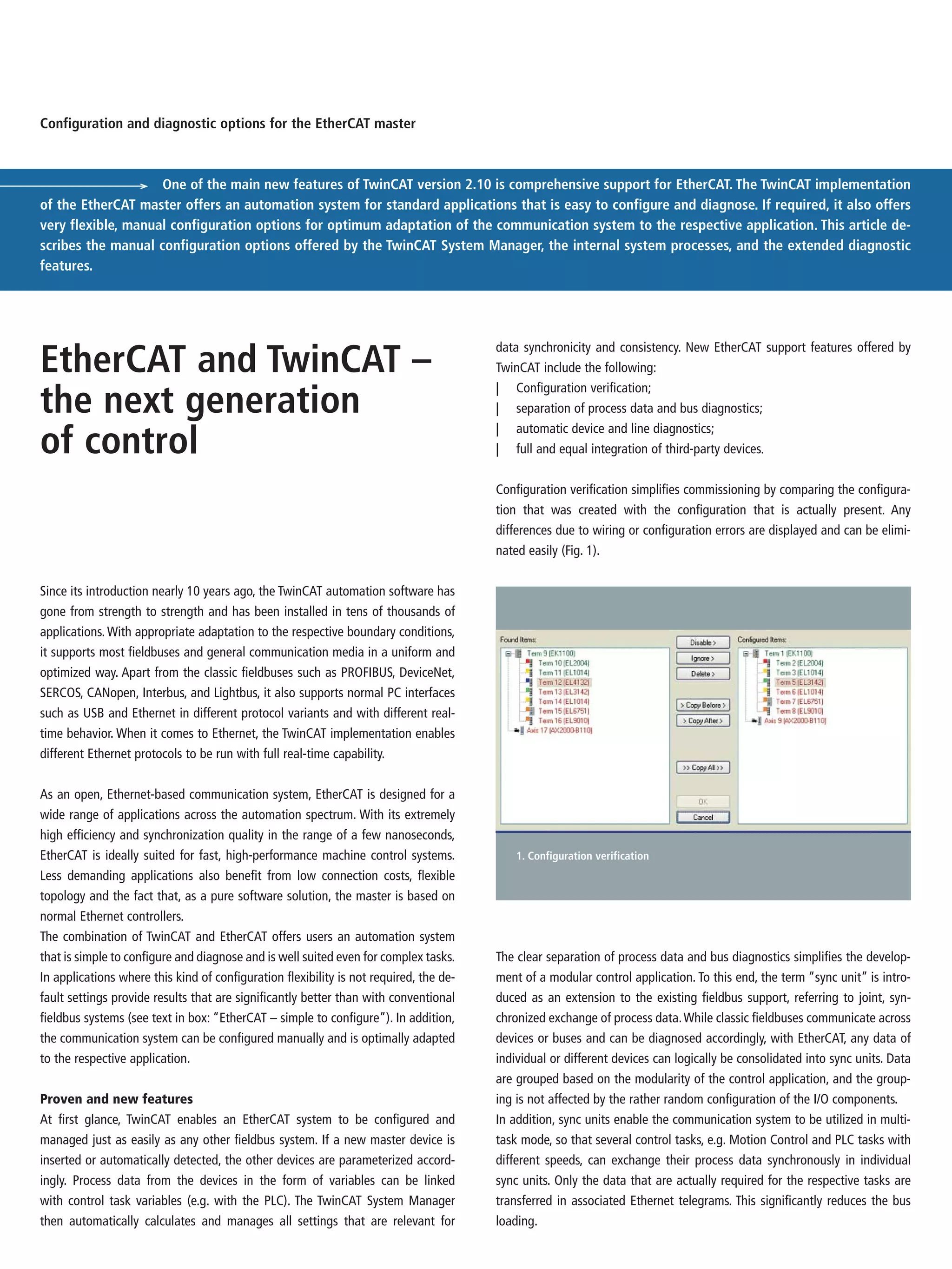
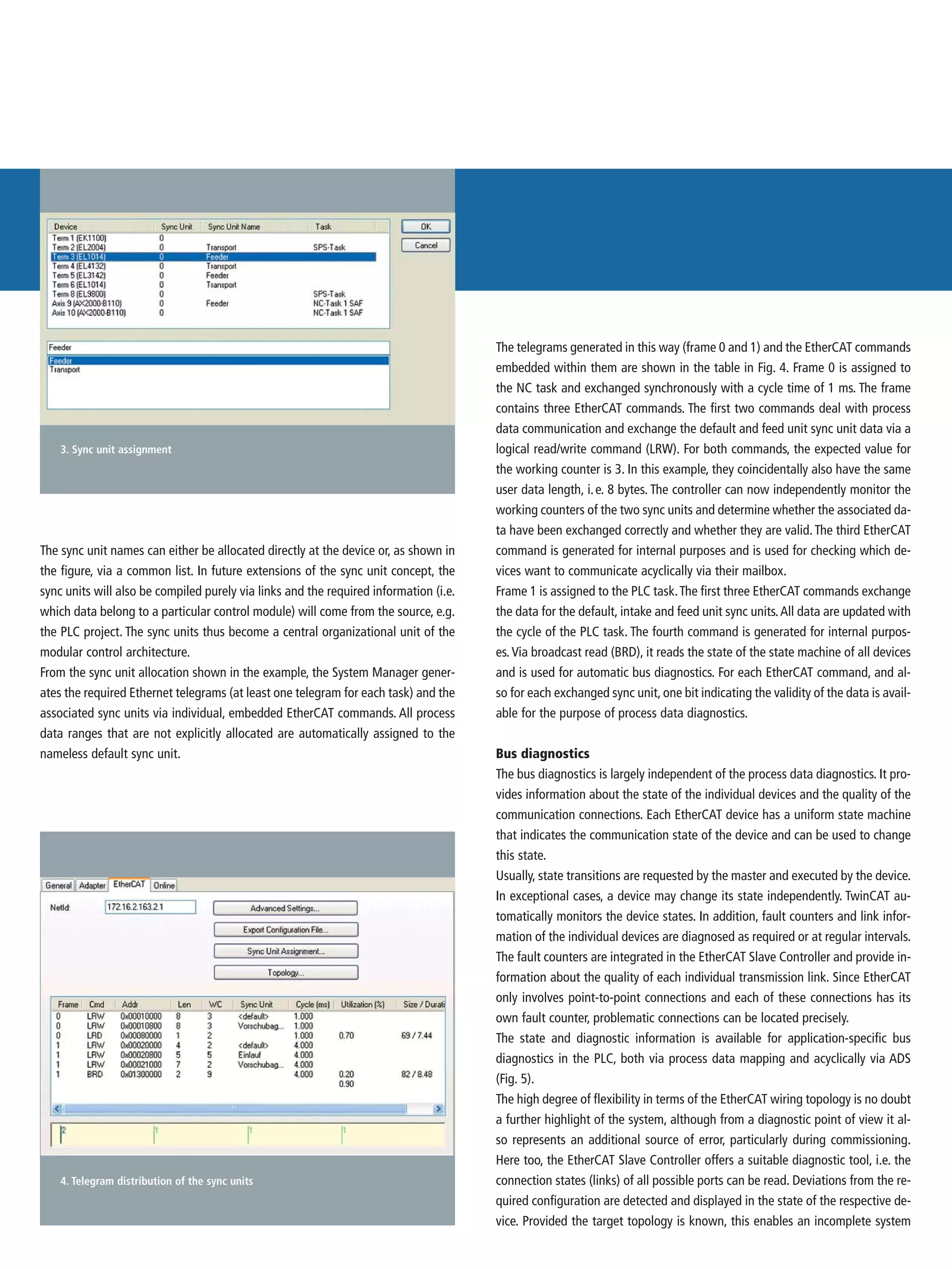
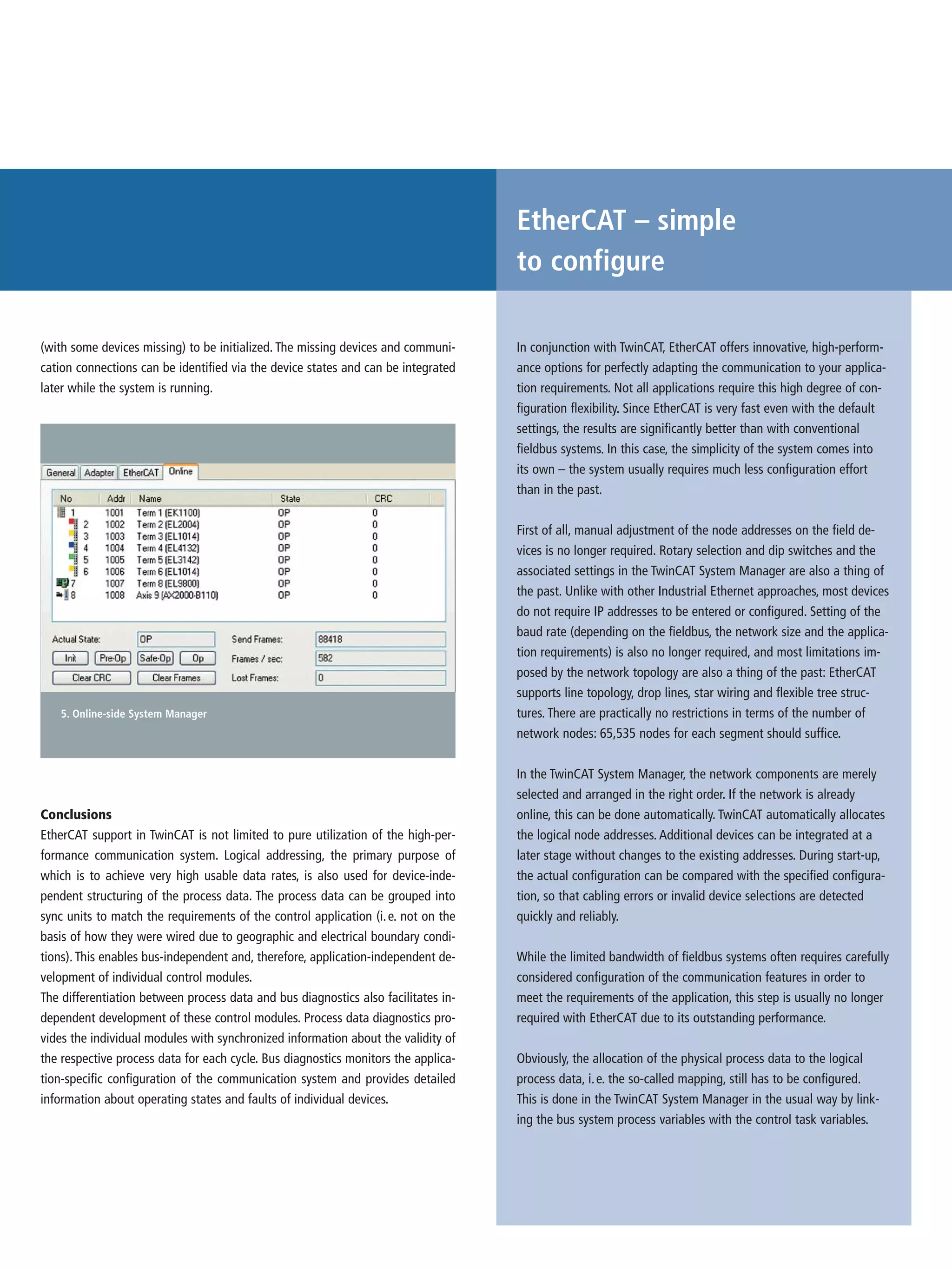
Download to read offline


The document discusses TwinCAT automation software's support for EtherCAT communication. It describes how TwinCAT enables modular configuration of an EtherCAT system through sync units, which group process data independently of the physical device configuration. This allows application-independent development of individual control modules. The document also outlines TwinCAT's configuration and diagnostic capabilities for EtherCAT systems, such as configuration verification, separation of process and bus diagnostics, and automatic device diagnostics.





















































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)










