Downloaded 230 times

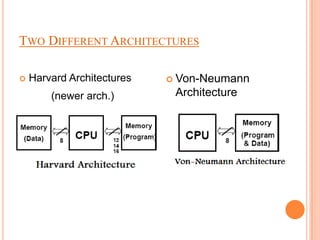













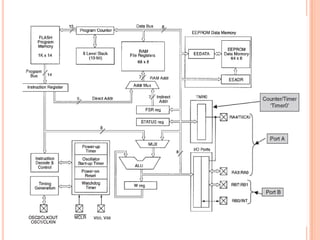
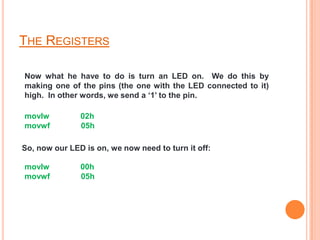
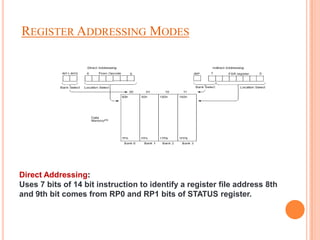







The document provides an introduction to PIC microcontrollers. It discusses that PIC stands for Programmable Intelligent Computer and is a microcontroller with built-in memory, RAM, and modules like EEPROM and timers. PICs are popular due to their low cost, availability of development tools, small instruction set, and small size. The document outlines the different PIC architectures, families, speeds, and memory sizes. It provides details on the registers, peripherals like flash memory, RAM, EEPROM, I/O ports, and USART serial communication.




























![Pic microcontroller [autosaved] [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/picmicrocontrollerautosavedautosaved-120427093459-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)















![[ PPT ] NS _ppt 4..ppt microprocesser and microcontroller fundamentals](https://cdn.slidesharecdn.com/ss_thumbnails/gurukulkangriuniversity-121014110754-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)









































