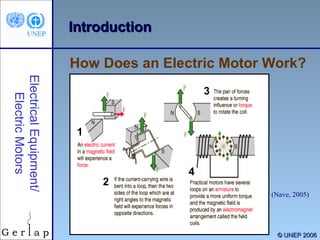
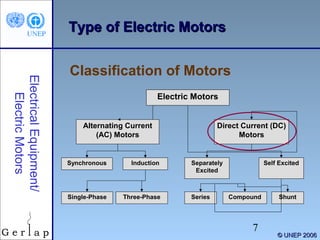
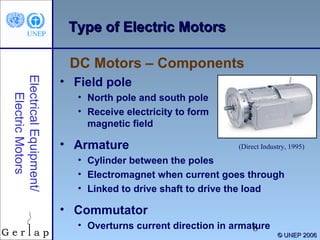
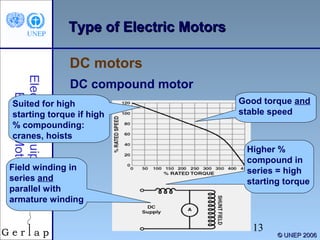
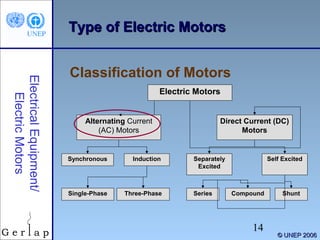
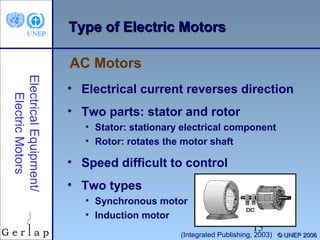
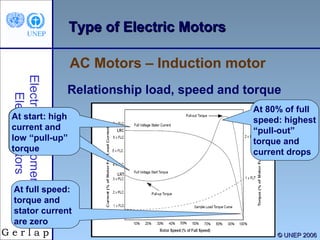
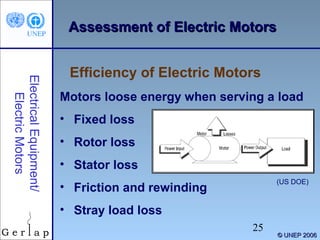
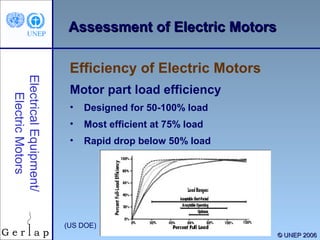
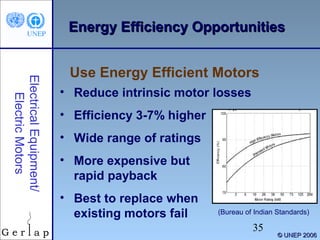
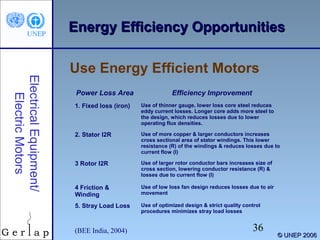
This document provides an overview of electric motors and opportunities for improving their energy efficiency. It begins with an introduction to electric motors, including their basic function and common types such as DC motors, synchronous AC motors, and induction AC motors. It then discusses assessing motor load and efficiency, highlighting factors that influence efficiency like age, load level, and temperature. The document concludes by outlining several energy efficiency opportunities for electric motors, such as using high-efficiency motors, reducing underloading, improving power quality, proper sizing for variable loads, and regular maintenance.












































![Amit[1]](https://cdn.slidesharecdn.com/ss_thumbnails/amit1-151213064608-thumbnail.jpg?width=640&height=640&fit=bounds)


![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)


















