Downloaded 2,905 times


This document discusses different types of electric motors. It begins by defining an electric motor as a device that converts electrical energy to mechanical energy. There are two main types of motors - alternating current (AC) motors and direct current (DC) motors. AC motors include synchronous and induction motors, while DC motors can be separately excited, self-excited, or universal motors. The document provides details on the basic design and operation of these different motor types. It also discusses motor efficiency and applications.
Overview of electric motors, their function in converting electrical energy to mechanical energy, and industrial impact (70% electrical load).
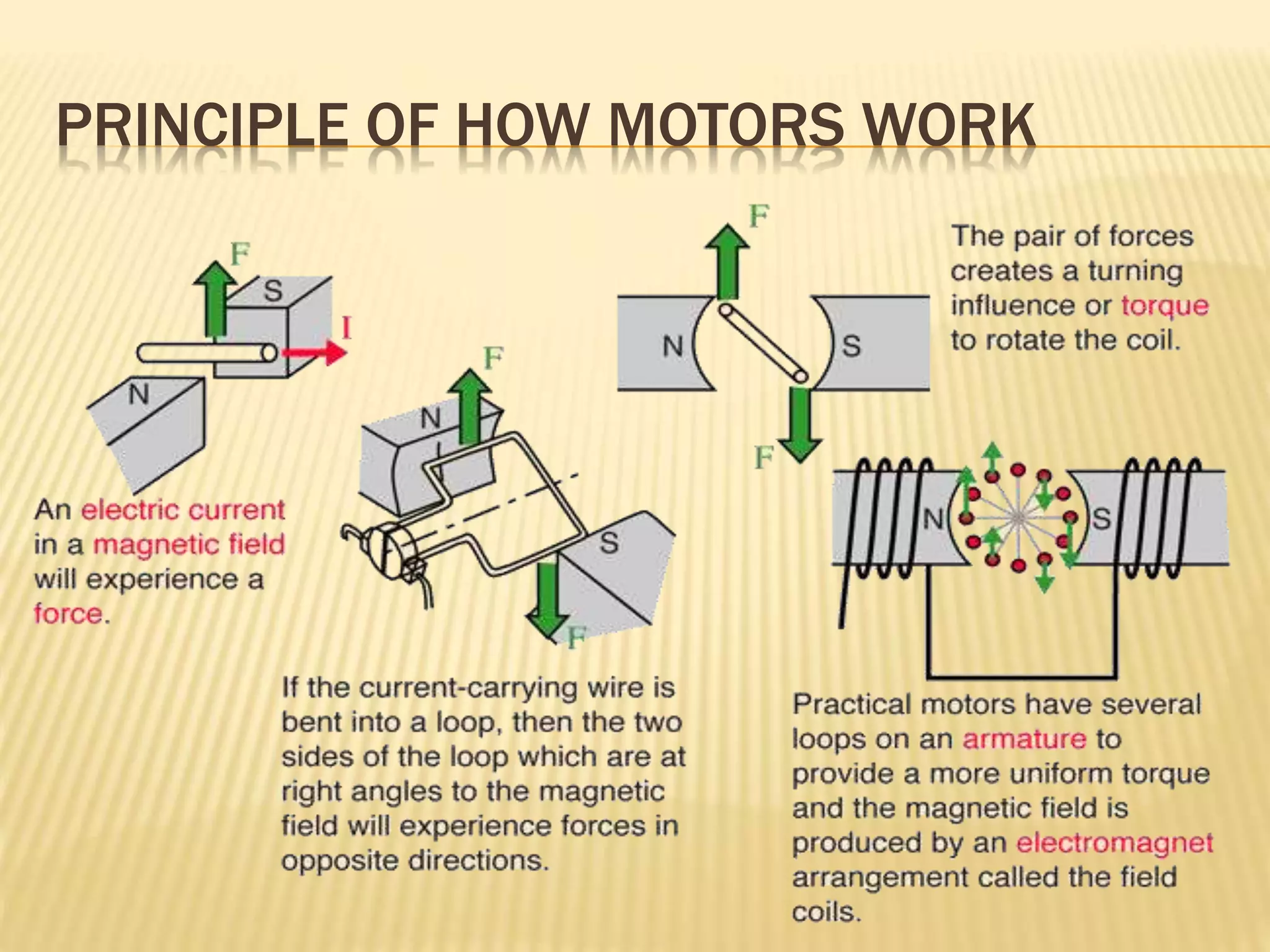
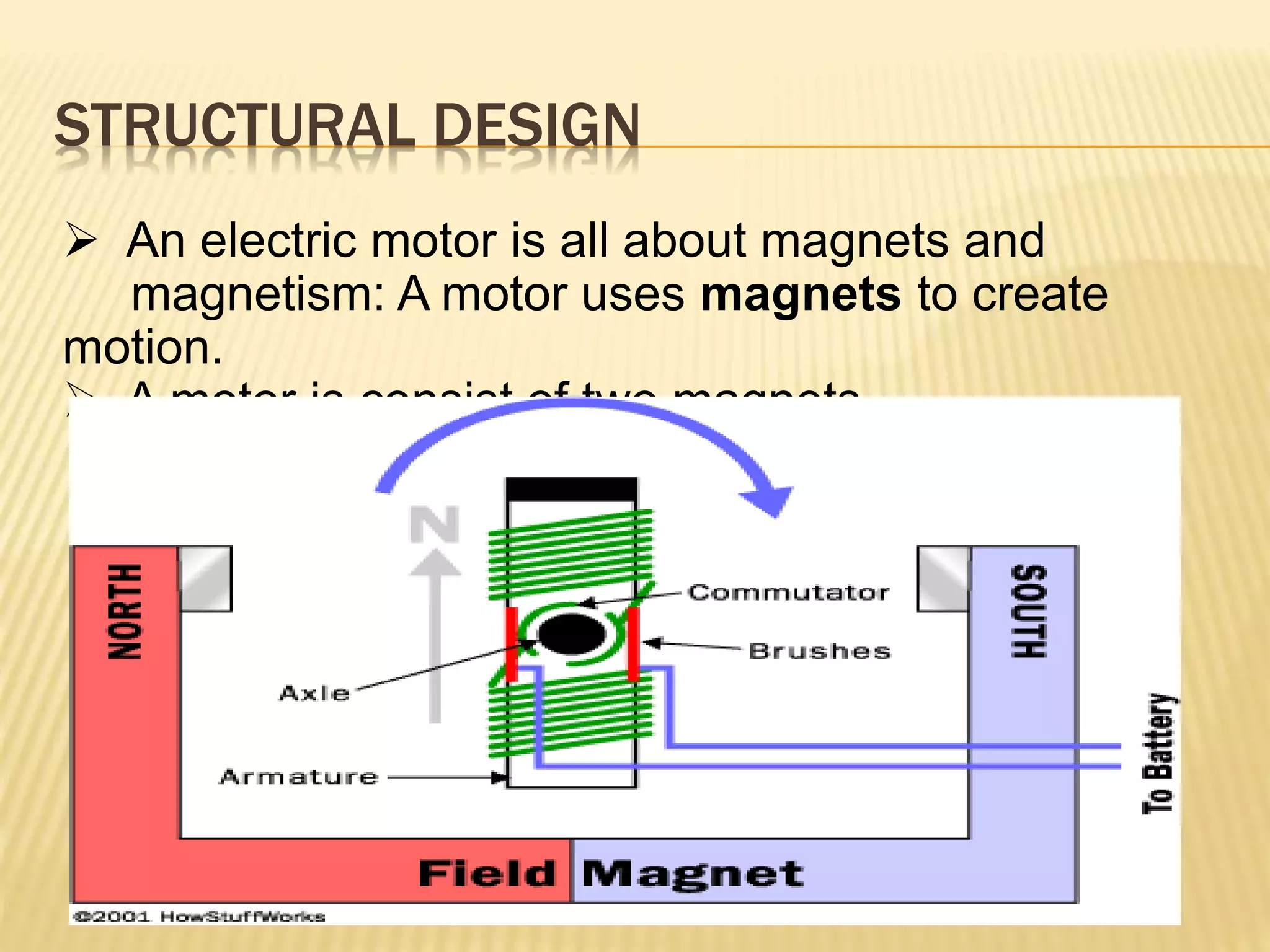
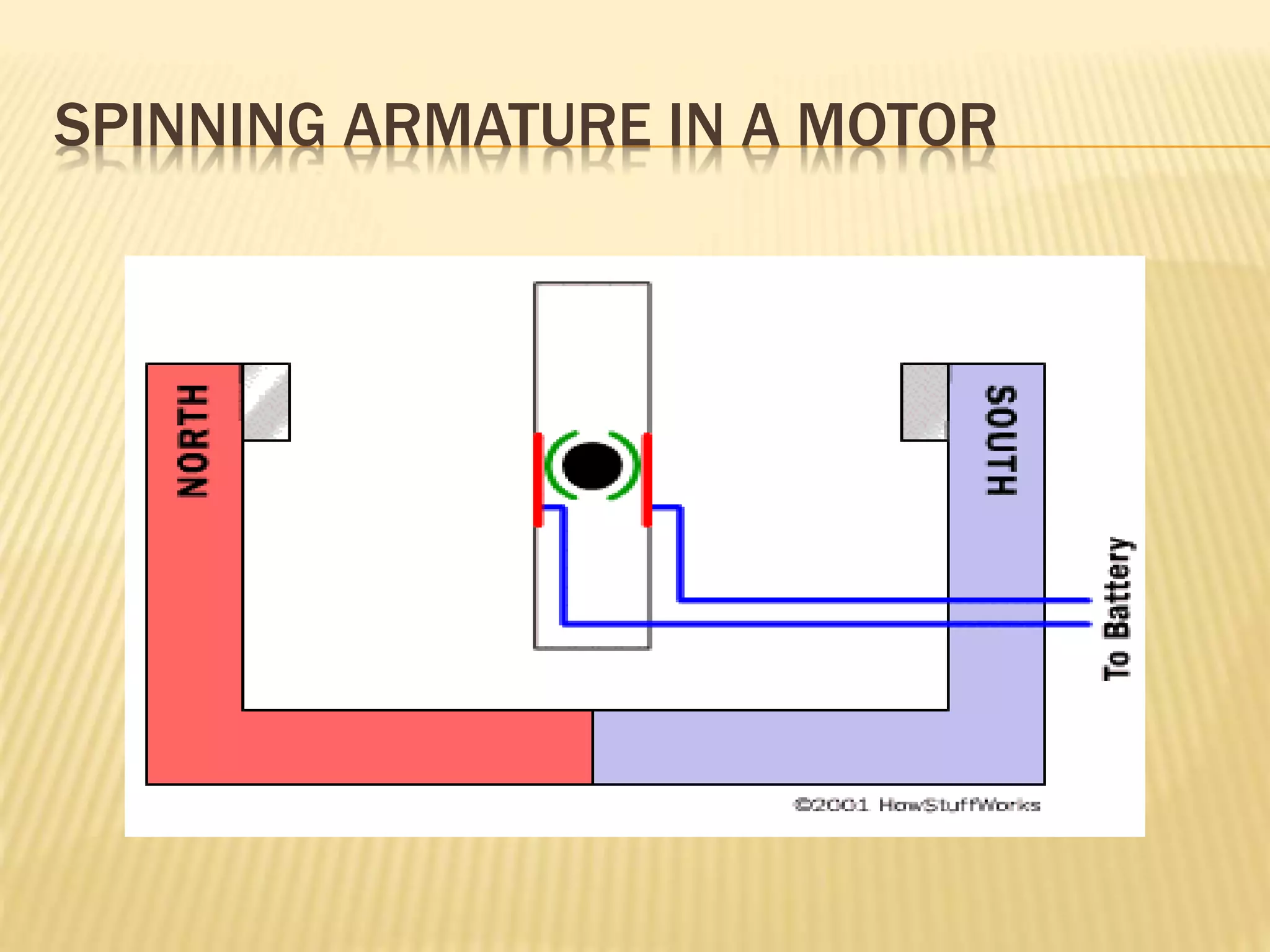
The operational principles of electric motors, emphasizing magnets' role in generating motion.
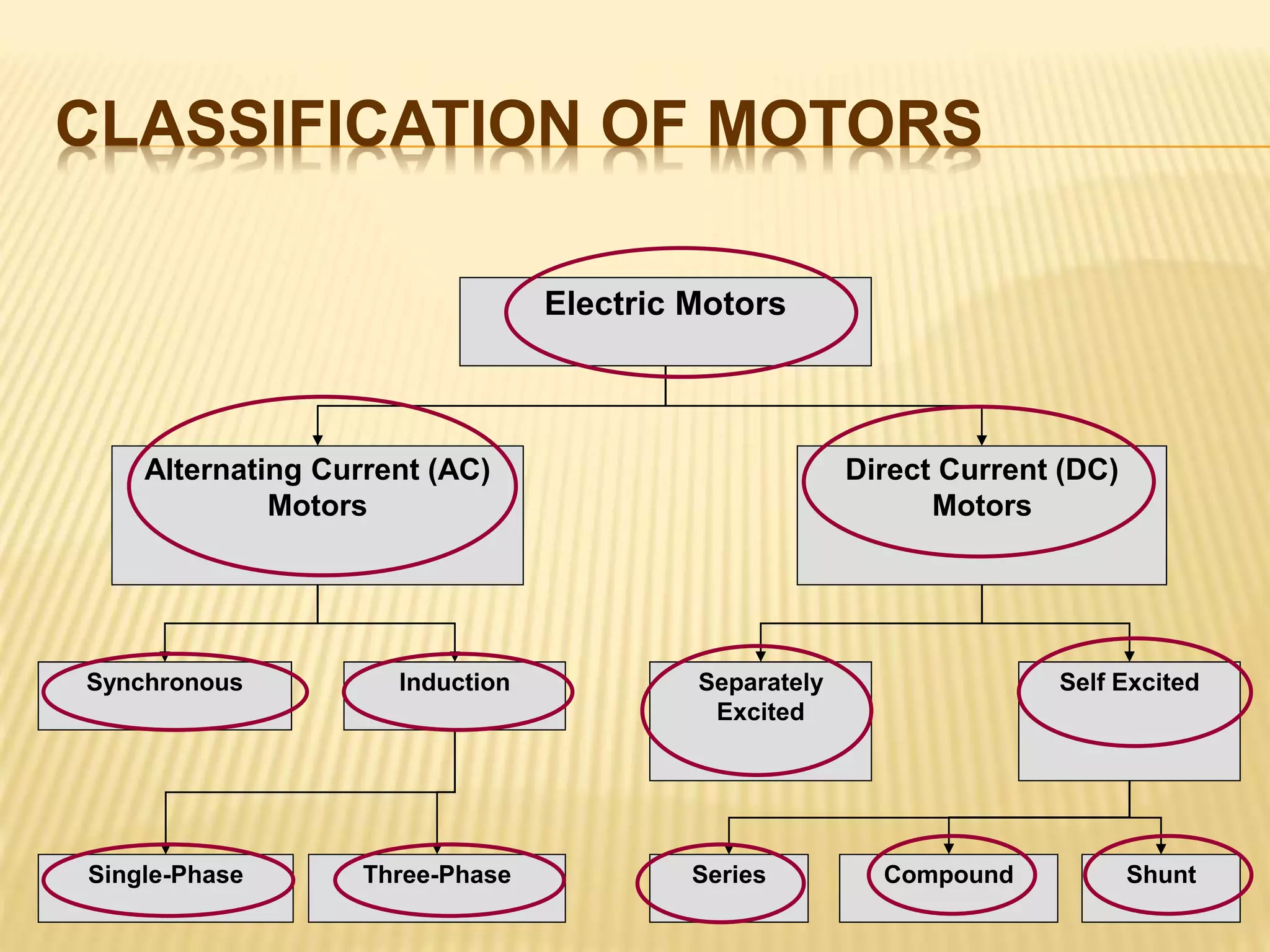
Classification of electric motors into AC and DC motors, with emphasis on types like synchronous, induction, and more.
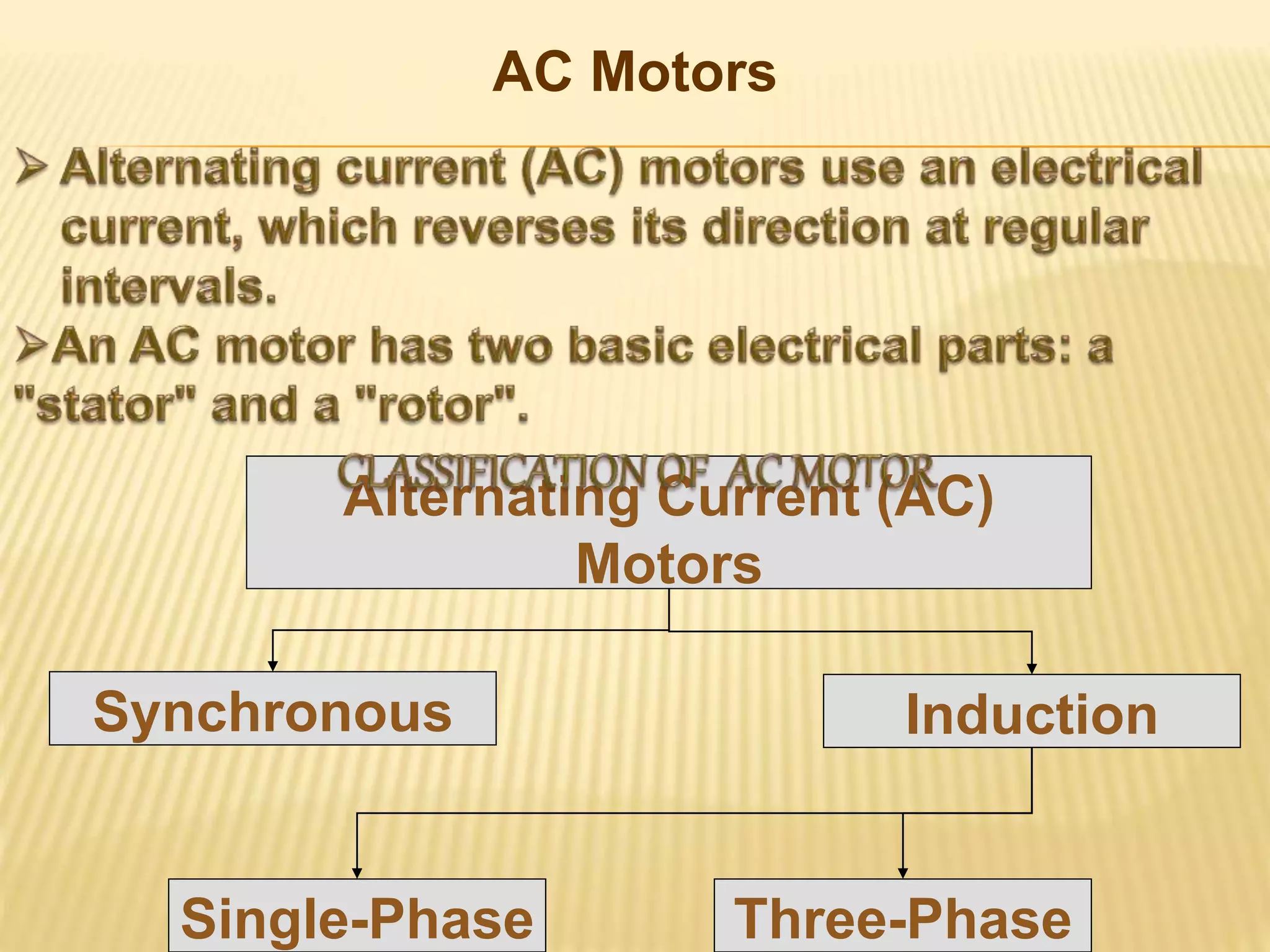
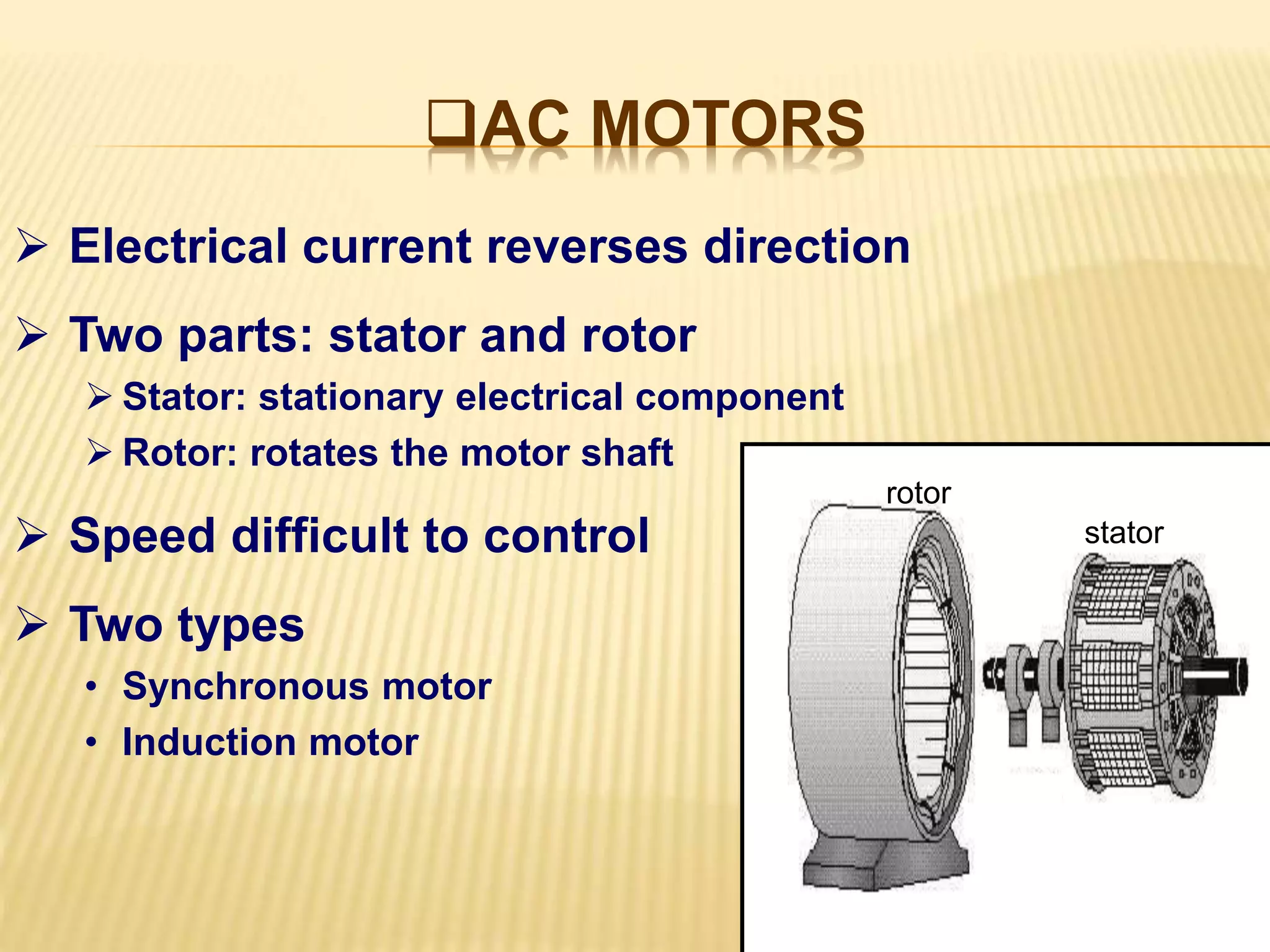
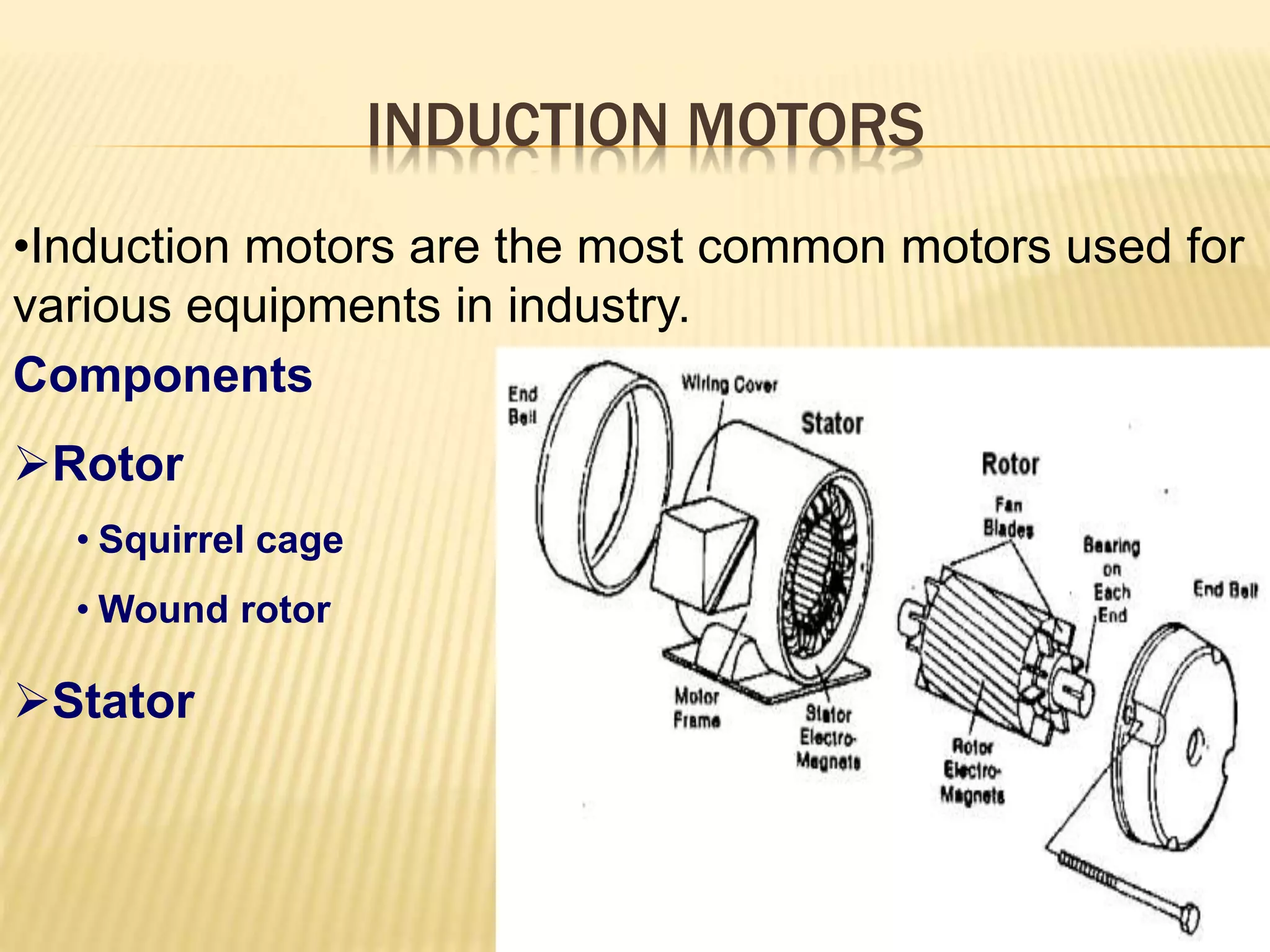
Detailed features of AC motors, including stator and rotor functions, synchronous and induction types.
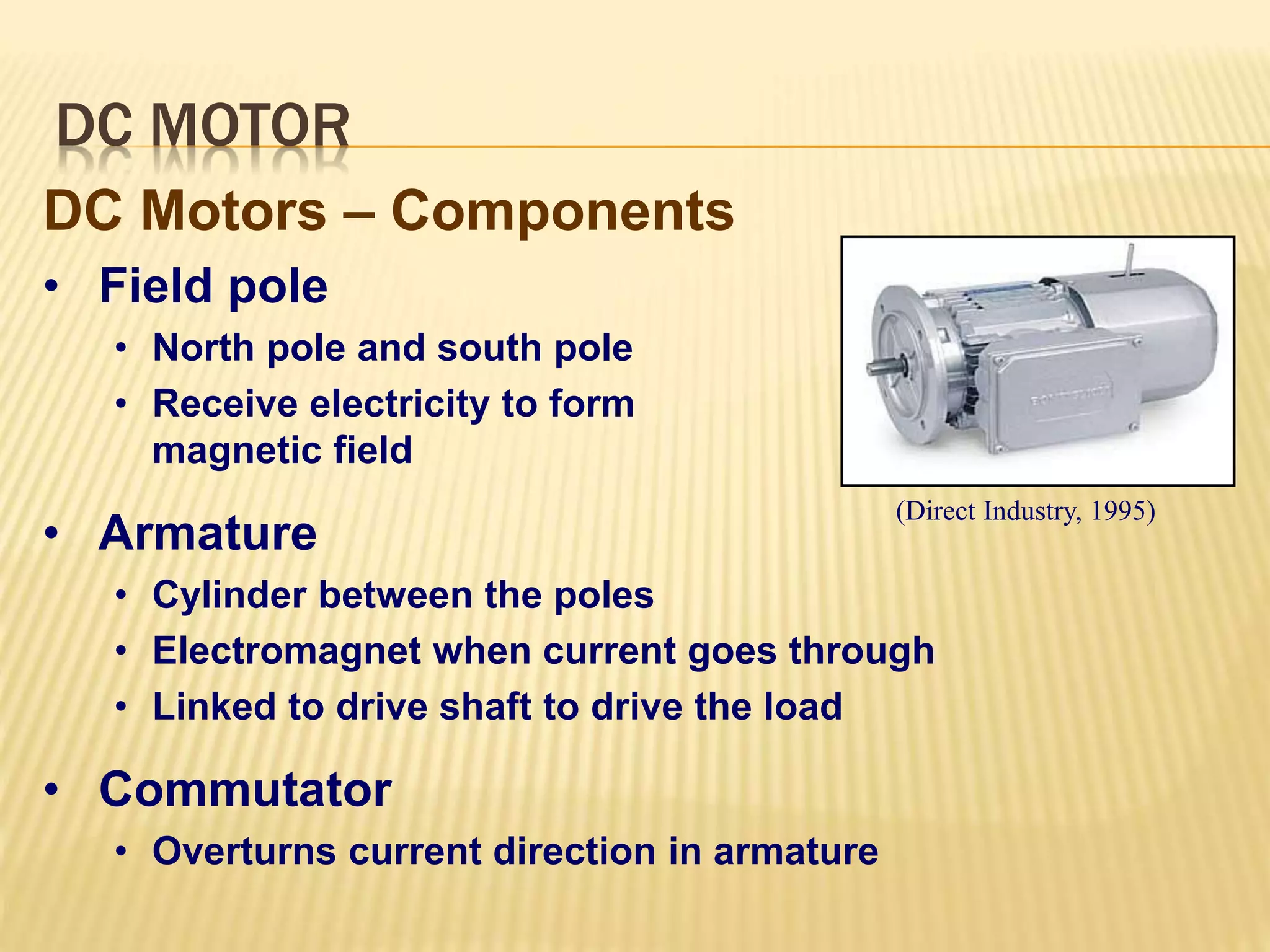
Key attributes and components of DC motors, their operation, advantages, and high RPM functionality.
DC motor types including separately excited, self-excited, and compound motors with their operational characteristics.
Universal motors operate on AC and DC, designed for high speed, ideal for portable equipment and high power applications.
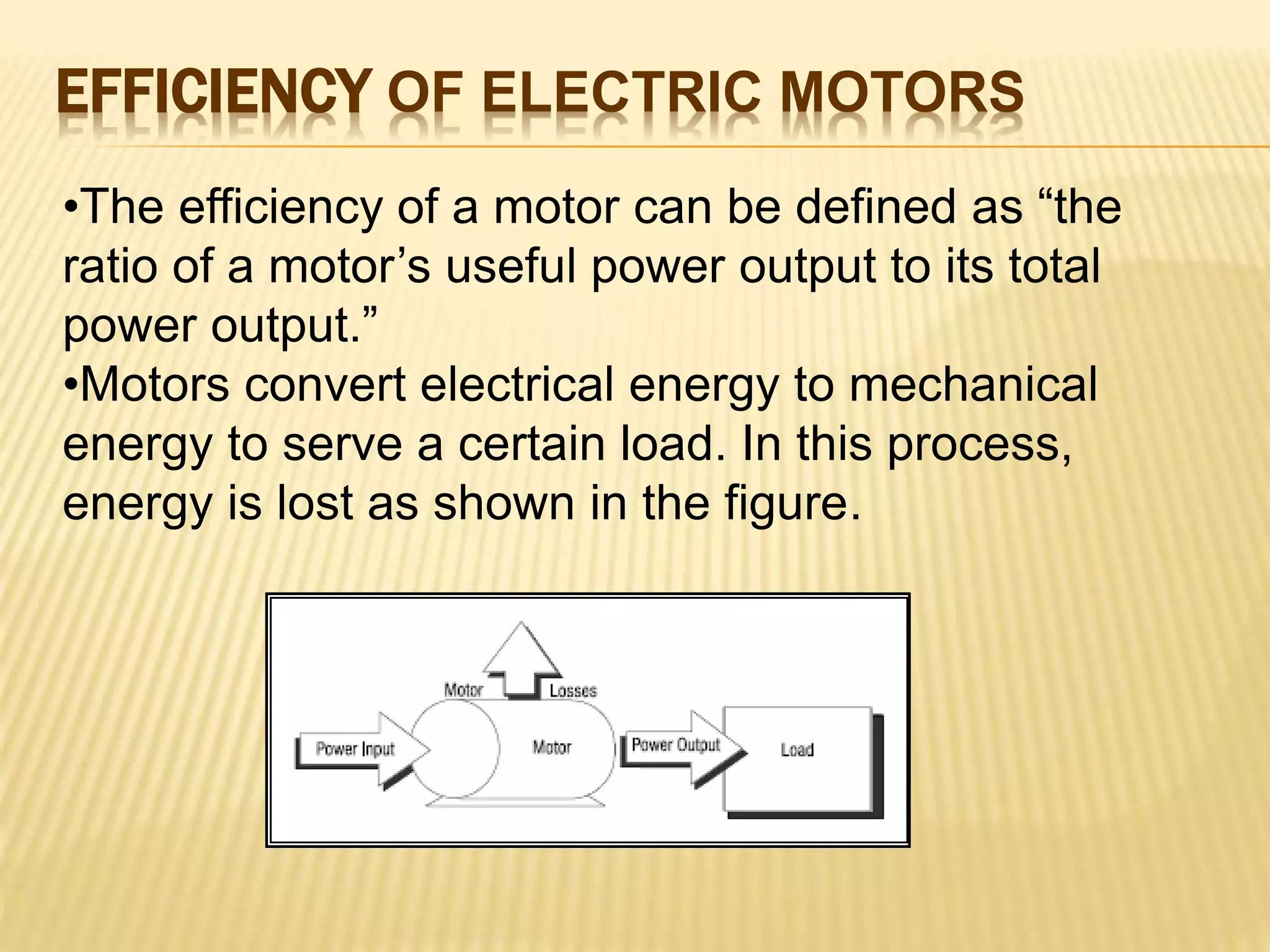
Definition of efficiency in electric motors, factors influencing it, and equations to measure motor load and efficiency.
Criteria for selecting motors based on application needs, types suited for various functions like industrial and robotics.






















































![Amit[1]](https://cdn.slidesharecdn.com/ss_thumbnails/amit1-151213064608-thumbnail.jpg?width=640&height=640&fit=bounds)


























