Downloaded 101 times
![ Td = G.I
[ where G is depends Flux density, number
of turns are the moving coil]
Tc = K.θ
[ where K is the spring constant which
depends upon the material and dimensions of
the spring ]](https://image.slidesharecdn.com/eee404-190922161704/85/ELECTRICAL-AND-ELECTRONICS-MEASUREMENT-40-320.jpg)

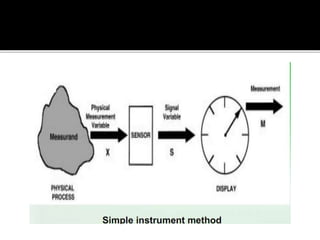
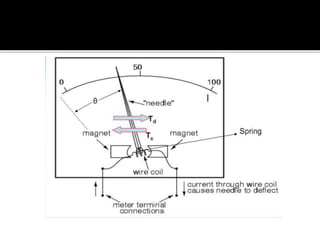
This document discusses measurement techniques and instruments. It covers the basic components, classifications, functions, and errors of measurement instruments. The key points are: - Measurement instruments have components for deflection, control, and damping of the pointer. Deflection indicates the measured quantity, control opposes deflection, and damping reduces oscillations. - Instruments can be classified as analog or digital, absolute or secondary. Accuracy depends on design, materials, and errors like systematic, random, and environmental errors. - Measurements involve comparing an unknown quantity to a standard and expressing the result numerically. Direct comparison is used when possible, otherwise indirect methods are used. Proper standards and methods are required for meaningful results.























































































