
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Design and control of an exoskeleton based device for hand rehabilitation
Similar to Design and control of an exoskeleton based device for hand rehabilitation (20)
Recently uploaded
Recently uploaded (20)
Design and control of an exoskeleton based device for hand rehabilitation
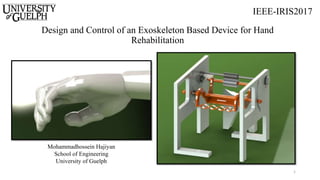
- 1. Design and Control of an Exoskeleton Based Device for Hand Rehabilitation Mohammadhossein Hajiyan School of Engineering University of Guelph 1 IEEE-IRIS2017
- 2. Introduction • Traumatic or neurological injuries largest epidemic throughout the recent century • Regimes and programs are available to help patients get back to the functional level • Rehabilitation in early stage of injuries-recommended robotic rehab-Continuous Passive Machine (CPM) • Machines actively perform the specific trajectory under precise control ! 2 1. Singelyn, Francois J., M. Deyaert, Daniel Joris, Etienne Pendeville, and Jean-Marie Gouverneur. "Effects of intravenous patient-controlled analgesia with morphine, continuous epidural analgesia, and continuous three-in-one block on postoperative pain and knee rehabilitation after unilateral total knee arthroplasty." Anesthesia & Analgesia 87, no. 1 (1998): 88-92. 2. Jack, David, Rares Boian, Alma S. Merians, Marilyn Tremaine, Grigore C. Burdea, Sergei V. Adamovich, Michael Recce, and Howard Poizner. "Virtual reality-enhanced stroke ehabilitation." IEEE transactions on neural systems and rehabilitation engineering 9, no. 3 (2001): 308-318. 3. Weinberg, Brian, Jason Nikitczuk, Shyamal Patel, Benjamin Patritti, Constantinos Mavroidis, Paolo Bonato, and P. Canavan. "Design, control and human testing of an active knee rehabilitation orthotic device." In Robotics and Automation, 2007 IEEE International Conference on, pp. 4126-4133. IEEE, 2007.
- 3. Literature Review on hand device 3 1. Polygerinos, Panagiotis, Zheng Wang, Kevin C. Galloway, Robert J. Wood, and Conor J. Walsh. "Soft robotic glove for combined assistance and at-home rehabilitation." Robotics and utonomous Systems 73 (2015): 135-143. 2. Wang, Shuang, Jiting Li, and Ruoyin Zheng. "Active and passive control algorithm for an exoskeleton with bowden cable transmission for hand rehabilitation." In Robotics and biomimetics (ROBIO), 2010 IEEE International Conference on, pp. 75-79. IEEE, 2010.
- 4. The proposed design and material 4 • 2 DOF exoskeleton based design • ABS, steel, and nylon • Two stepper motors and belt-pulley • 4 fingers move together • Max rang 60 and 90 for MCP and PIP, respectively
- 5. Operation Conditions and ROM 5
- 7. Equations of Motion Lagrangian Approach 7
- 8. Disturbance (Friction-Backlash) Disturbance on the dynamic 8
- 9. FEM and control design • Computed Torque Control (CTC) • PD and PID • Sliding mode controllers (SMC1 and SMC2) 9 CTC with disturbance for θ1 PID with disturbance for θ1 PD with disturbance for θ1
- 10. 10 Sliding mode controllers and Improvement SM controller for θ1 SM controller for θ2 Control effort θ1 Control effort θ2
- 11. Exoskeleton based design structure is provided and analyzed using FEM in static mode. Sliding mode controller with integration term provides the best result among mentioned controllers (PD, CTC and PID) Chattering is the main problem and can be resolved using adaptive SMC The input can damage the actuators as the signal keep changing with relatively high magnitude. 11
- 12. References 1. Bütefisch, Cathrin, et al. "Repetitive training of isolated movements improves the outcome of motor rehabilitation of the centrally paretic hand."Journal of the neurological sciences 130.1 (1995): 59-68. 2. Mackin, Evelyn, and Anne D. Callahan. Rehabilitation of the hand. Saint Louis: Mosby, 1978. 3. J. Zhang and C. C. Cheah, “Passivity and stability of human–robot interaction control for upper-limb rehabilitation robots,” Robotics, IEEE Transactions on, vol. 31, no. 2, pp. 233–245, 2015. 4. Wang, Ju, et al. "Design of an exoskeleton for index finger rehabilitation."Engineering in Medicine and Biology Society, 2009. EMBC 2009. Annual International Conference of the IEEE. IEEE, 2009. 5. Li, Jiting, et al. "Development of a hand exoskeleton system for index finger rehabilitation." Chinese journal of mechanical engineering 25.2 (2012): 223-233. 6. Zheng, Ruoyin, and Jiting Li. "Kinematics and workspace analysis of an exoskeleton for thumb and index finger rehabilitation." Robotics and Biomimetic 7. Bachmann, Stefan, et al. "Inpatient rehabilitation specifically designed for geriatric patients: systematic review and meta-analysis of randomised controlled trials." Bmj 340 (2010): c1718.s (ROBIO), 2010 IEEE International Conference on. IEEE, 2010. 8. Xu, Haojian, Maj D. Mirmirani, and Petros A. Ioannou. "Adaptive sliding mode control design for a hypersonic flight vehicle." Journal of guidance, control, and dynamics 27.5 (2004): 829-838. 9. Bartolini, Giorgio, Antonella Ferrara, and Vadim I. Utkin. "Adaptive sliding mode control in discrete-time systems." Automatica 31.5 (1995): 769-773. 10. Huang, Ying-Jeh, Tzu-Chun Kuo, and Shin-Hung Chang. "Adaptive sliding-mode control for nonlinearsystems with uncertain parameters." Systems, Man, and Cybernetics, Part B: Cybernetics, IEEE Transactions on 38.2 (2008): 534-539. 11. Lee, Daewon, H. Jin Kim, and Shankar Sastry. "Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter." International Journal of control, Automation and systems 7.3 (2009): 419-428. 12. Wege, Andreas, Konstantin Kondak, and Güinter Hommel. "Mechanical design and motion control of a hand exoskeleton for rehabilitation."Mechatronics and Automation, 2005 IEEE International Conference. Vol. 1. IEEE, 2005. 13. Wege, Andreas, and Günter Hommel. "Development and control of a hand exoskeleton for rehabilitation of hand injuries." Intelligent Robots and Systems, 2005.(IROS 2005). 2005 IEEE/RSJ International Conference on. IEEE, 2005. 14. M. Biglarbegian, W. W. Melek, and J. M. Mendel, “Design of novel interval type-2 fuzzy controllers for modular and reconfigurable robots: Theory and experiments,” IEEE transactions on industrial electronics, vol. 58, no. 4, 15. Putnam, Matthew D., et al. "Distal radial metaphyseal forces in an extrinsic grip model: implications for postfracture rehabilitation." The Journal of hand surgery 25.3 (2000): 469-475. 16. E. Erdemir, M. ¨ Ozkan, K. Kawamura, D. M. Wilkes, M. Firat, and A. Polat, “Design and optimization of a fuzzy-neural hybrid controller for an artificial muscle robotic arm using genetic algorithms,” in Humanoid Robots (Humanoids), 2010 10th IEEE-RAS International Conference on, pp. 530–535, IEEE, 2010. 12