Download to read offline
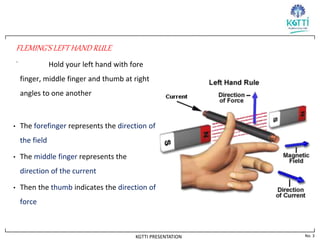
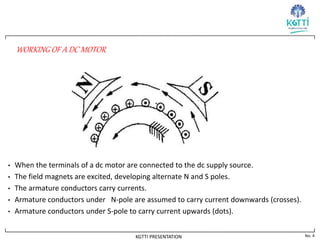
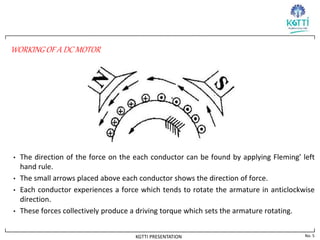
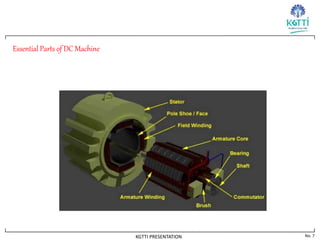
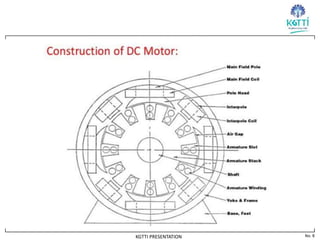
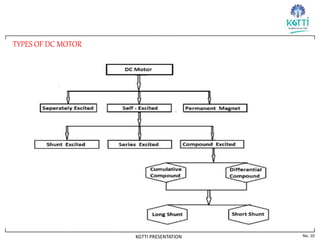
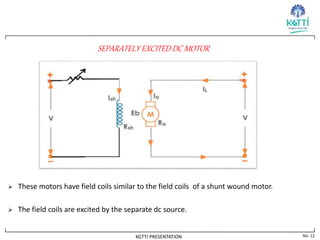
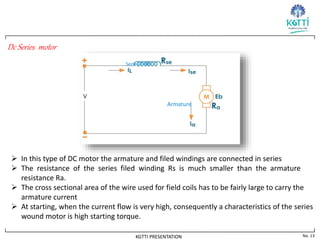
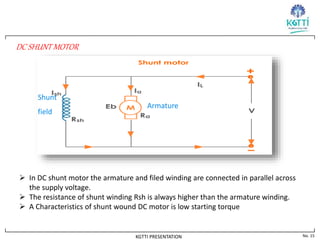

A DC motor converts electrical energy into mechanical energy using the principles that a current carrying conductor placed in a magnetic field experiences a force. It has a stator that houses field windings and a rotor that rotates. There are different types of DC motors including separately excited, series, shunt, and compound motors. Series motors have high starting torque but low speed regulation while shunt motors have low starting torque but good speed regulation, making each suitable for different applications.