Download to read offline
![4
未知のデータにどう対処するか?①
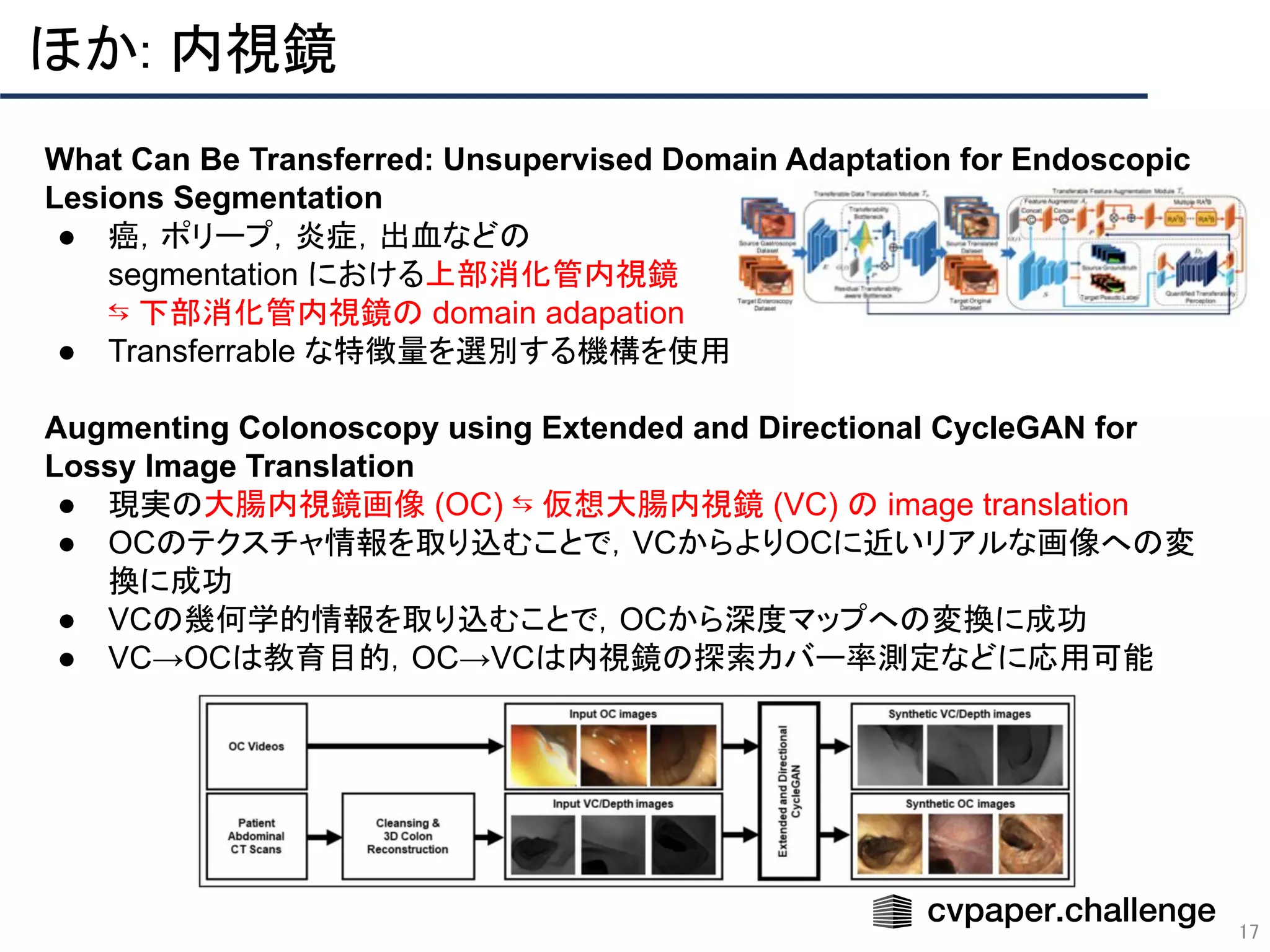
【Domain adaptation】What Can Be Transferred: Unsupervised Domain
Adaptation for Endoscopic Lesions Segmentation
● 上部消化管内視鏡 ⇆ 下部消化管内視鏡間での domain adaptation
【Domain adaptation】Unsupervised Instance Segmentation in Microscopy
Images via Panoptic Domain Adaptation and Task Re-weighting
● 蛍光顕微鏡画像 → HE染色画像への domain adaptation を利用して
細胞核に対する segmentation を教師なしで実現
● CyCADA [Hoffman et al., 2018] にもとづく](https://image.slidesharecdn.com/medicalbiologicalandcellmicroscopy-200724001344/75/CVPR-2020-Medical-Biological-and-Cell-Microscopy-4-2048.jpg)
![5
未知のデータにどう対処するか?②
ADINet: Attribute driven incremental network for retinal image classification
● 眼底写真の Classification task に対して
増分学習フレームワークを利用
→将来未知の疾患クラスを追加する際,
モデルの忘却・再学習が不要に
【半教師あり学習】FocalMix: Semi-Supervised Learning for 3D Medical Image
Detection
● 肺CTに対する結節検出
● MixMatch [NeurIPS, 2019] を利用できるような Soft target focal lossを提案
⇨未知のデータセットに対する性能が向上
【メタ学習】FOAL: Fast Online Adaptive Learning for Cardiac Motion Estimation
● 心臓MRIに対するmotion estimation
● メタ学習により,学習データにない心疾患が撮像された場合にも対応](https://image.slidesharecdn.com/medicalbiologicalandcellmicroscopy-200724001344/75/CVPR-2020-Medical-Biological-and-Cell-Microscopy-5-2048.jpg)



![14
心臓MRI
まとめ
● 心臓MRIは3D volume dataの動画であり,4D imageに対する処理が必要
A Spatiotemporal Volumetric Interpolation Network for 4D Dynamic Medical
Image
● 4Dでの医用動画補完を行う世界初のnetworkを
提案
FOAL: Fast Online Adaptive Learning for Cardiac Motion Estimation
● motion estimation を
正常, 拡張型心筋症, 肥大型心筋症,
心筋梗塞後の収縮不全, 右心室収縮不全のうち
4疾患で学習 → 残り1疾患でテスト
● segmentation と教師なしmotion estimation の
multi-task learning [Qin et al., 2018] にメタ学習を
併用し,未知の疾患に対する汎化性能を向上](https://image.slidesharecdn.com/medicalbiologicalandcellmicroscopy-200724001344/75/CVPR-2020-Medical-Biological-and-Cell-Microscopy-14-2048.jpg)


「CVPR 2020 網羅的サーベイ」により作成された Medical, Biological and Cell Microscopy エリアのメタサーベイ資料です。 CVPR 2020 網羅的サーベイ: http://xpaperchallenge.org/cv/survey/cvpr2020_summaries/listall/ cvpaper.challengeはコンピュータビジョン分野の今を映し、トレンドを創り出す挑戦です。論文サマリ作成・アイディア考案・議論・実装・論文投稿に取り組み、凡ゆる知識を共有します。2020の目標は「トップ会議に30+本投稿」することです。 http://xpaperchallenge.org/cv/
![SSII2020 [OS2-03] 深層学習における半教師あり学習の最新動向](https://cdn.slidesharecdn.com/ss_thumbnails/ssiisuzukios203-200611050727-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向](https://cdn.slidesharecdn.com/ss_thumbnails/os2-03latest-210610045610-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]AutoAugment: LearningAugmentation Strategies from Data & Learning Data...](https://cdn.slidesharecdn.com/ss_thumbnails/dlp0712f-190719034120-thumbnail.jpg?width=640&height=640&fit=bounds)



![SSII2022 [TS3] コンテンツ制作を支援する機械学習技術〜 イラストレーションやデザインの基礎から最新鋭の技術まで 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts32022ssiiess-220607054523-e80be8dc-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]Pervasive Attention: 2D Convolutional Neural Networks for Sequence-to-...](https://cdn.slidesharecdn.com/ss_thumbnails/20180907pervasiveattention2dconvolutionalneuralnetworksforsequence-to-sequenceprediction-180907000649-thumbnail.jpg?width=640&height=640&fit=bounds)







![SSII2021 [OS2-03] 自己教師あり学習における対照学習の基礎と応用](https://cdn.slidesharecdn.com/ss_thumbnails/os2-04-210605061641-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2020 [OS2-02] 教師あり事前学習を凌駕する「弱」教師あり事前学習](https://cdn.slidesharecdn.com/ss_thumbnails/200611ssii2020os2weaksupervision-200609142553-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]医用画像解析におけるセグメンテーション](https://cdn.slidesharecdn.com/ss_thumbnails/20190301fujino4-190322072121-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...](https://cdn.slidesharecdn.com/ss_thumbnails/ss1-01-210607043349-thumbnail.jpg?width=640&height=640&fit=bounds)