Dive into the fascinating world of motion with this educational presentation that compares translational and rotational motion—two fundamental concepts in physics. Designed for students, educators, and science enthusiasts, this SlideShare breaks down the similarities and differences between these types of motion in a clear and engaging way.
⚙️ Key topics covered:
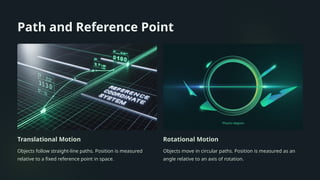
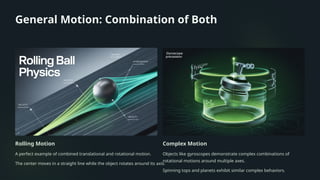
Definitions and real-life examples of translational and rotational motion
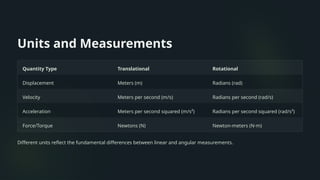
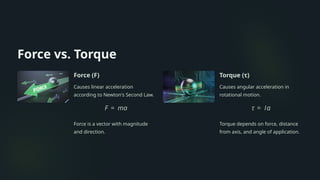
Core concepts such as displacement, velocity, acceleration, and force
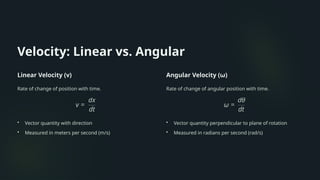
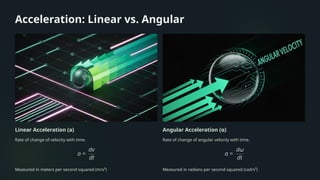
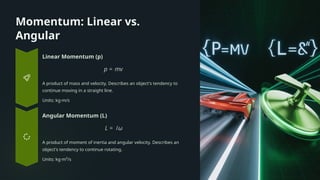
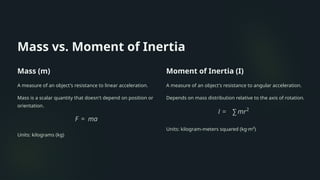
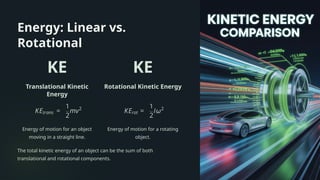
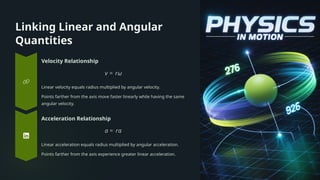
Analogies between linear and angular quantities (e.g., mass vs. moment of inertia)
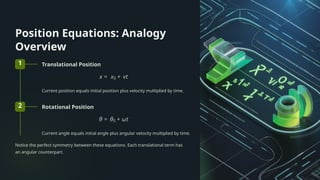
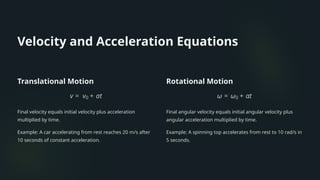
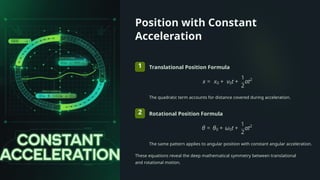
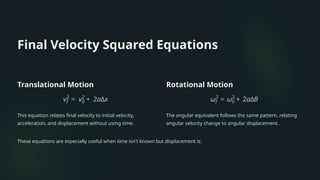
Equations of motion and how they apply in each case
Practical applications in engineering, sports, and everyday life
Through diagrams, comparisons, and simplified explanations, this presentation helps viewers understand how objects move in straight lines and how they rotate around axes—and why both types of motion are essential in understanding the physical world.
📘 Perfect for physics learners looking to strengthen their grasp of mechanics and motion!