Downloaded 25 times

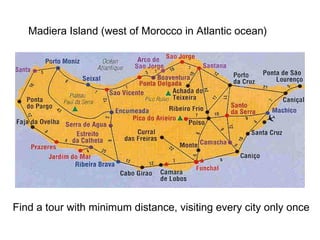
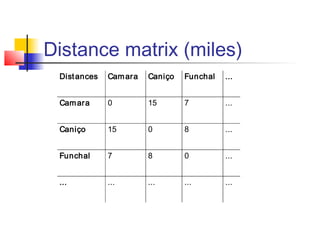
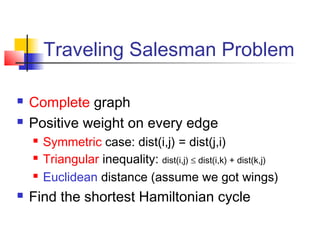
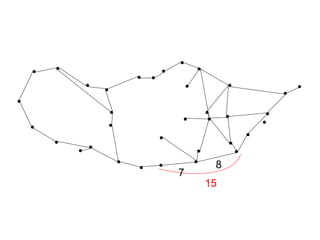
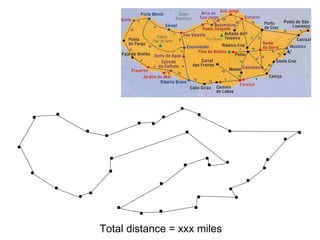
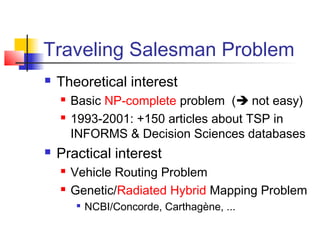
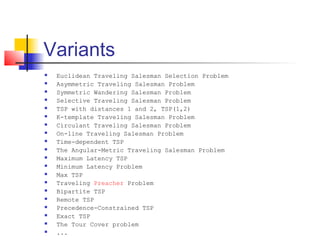
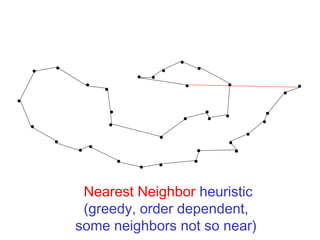
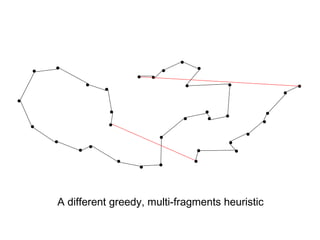
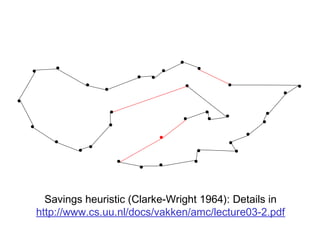
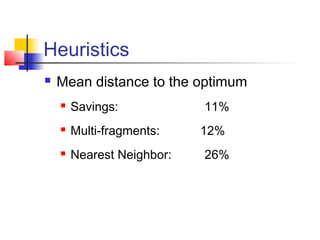
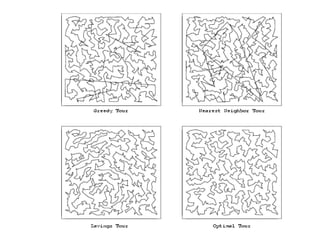
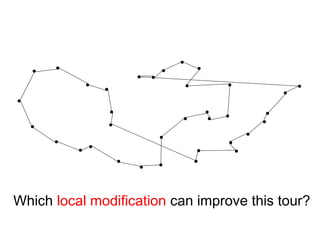
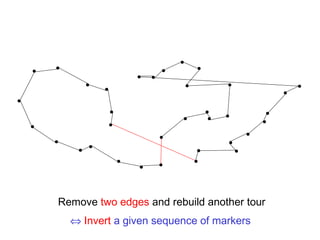
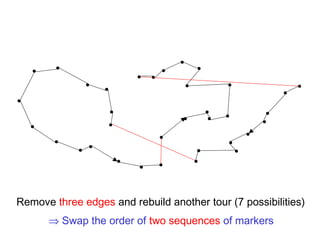
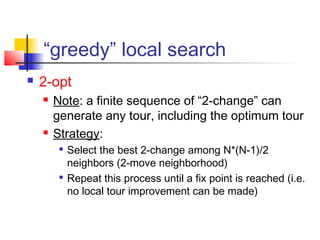
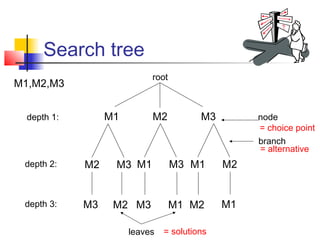
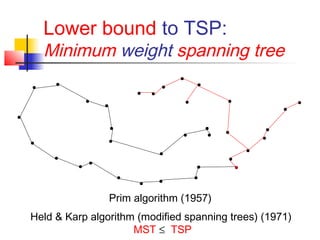
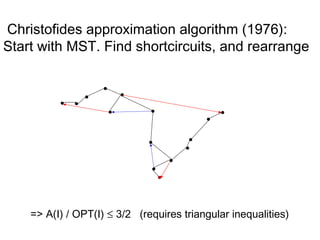

The document discusses the traveling salesman problem (TSP) and methods for solving it. It begins with an introduction to the TSP and provides an example on Madiera Island. It then covers building tours from scratch using heuristics like nearest neighbor and savings. Local search methods like 2-opt and 3-opt are presented for improving tours. The document also discusses metaheuristics such as tabu search, simulated annealing, and variable neighborhood search. Exact methods and benchmarks for solving larger TSP instances are presented at the end.




























































![Polymer [ बहुलक ] Chemistry Notes PDF - Irfanullah Mehar - JJ Sir Chemistry.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/polymerchemistrynotespdf-irfanullahmehar-jjsirchemistry-260210172118-3f9b37f7-thumbnail.jpg?width=640&height=640&fit=bounds)



