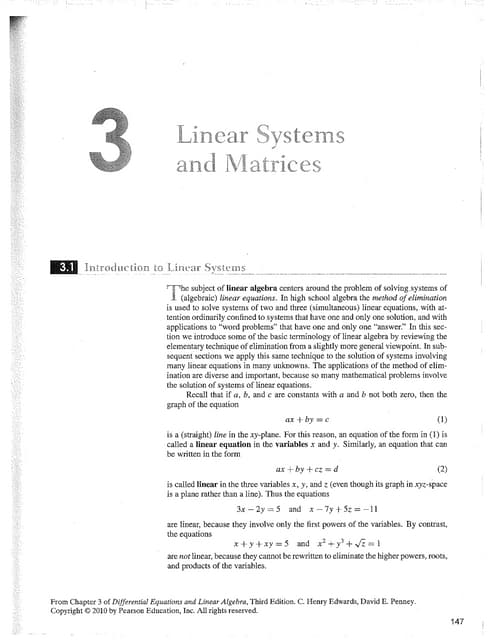
This document provides an overview of linear systems and matrices. It discusses systems of linear equations, matrix notation, elementary row operations used to solve systems, echelon form, reduced row-echelon form, and examples of each. Key concepts covered include consistent and inconsistent systems, homogeneous systems, parametric solutions, and determining whether a matrix is in echelon/reduced echelon form. The document is organized into sections covering linear systems, matrices/Gaussian elimination, and reduced row-echelon matrices.












![Let A be a general m x n matrix
i th row of A
j th column of A
Will sometimes write A = [ aij ]
Will sometimes write ( A )ij for aij
ai1 ai2 ain 1i m
1
2
1
j
j
mj
a
a
j n
a
3.4 Matrix Operations: General Notation](https://image.slidesharecdn.com/3-180103165216/85/Chapter-3-Linear-Systems-and-Matrices-Part-2-Slides-17-320.jpg)
![ If m n then A is called a square matrix (same
number of equations and unknowns)
For a square matrix, the elements
a11, a22, …, ann constitute the main diagonal of A
Two matrices, A [ aij ] and B [ bij ], are equal
if they have the same dimensions and aij bij for
1 ≤ i ≤ m, 1 ≤ j ≤ n
3.4 Matrix Operations: General Notation](https://image.slidesharecdn.com/3-180103165216/85/Chapter-3-Linear-Systems-and-Matrices-Part-2-Slides-18-320.jpg)
![Diagonal matrix is a square nxn matrix A [ aij ]
where aij 0 for i ≠ j, i.e. the terms off the main
diagonal are all zero.
3 0 0 0
0 4 0 0
0 0 8 0
0 0 0 5
3.4 Matrix Operations: Diagonal Matrix
9 0 0
0 0 0
0 0 2
0 0 0
0 0 0
0 0 0
1 0 0
0 1 0
0 0 1
8 0
0 3
2 0
0 0
0 0
0 1
0 0
0 0
](https://image.slidesharecdn.com/3-180103165216/85/Chapter-3-Linear-Systems-and-Matrices-Part-2-Slides-19-320.jpg)
![Identity matrix is a square nxn matrix In [ aij ]
where aii 1 and aij 0 for i ≠ j, i.e. the terms off
the main diagonal are all zero and the terms on the
main diagonal are all equal to 1.
4
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
I
3.4 Matrix Operations: Identity Matrix
3
1 0 0
0 1 0
0 0 1
I 2
1 0
0 1
I
1
1I](https://image.slidesharecdn.com/3-180103165216/85/Chapter-3-Linear-Systems-and-Matrices-Part-2-Slides-20-320.jpg)
![Zero matrix is an mxn matrix 0mxn [ aij ] where
aij 0 for all i and j, i.e. all terms are zero.
4
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0
3.4 Matrix Operations: Zero Matrix
3
0 0 0
0 0 0
0 0 0
0 2x2
0 0
0 0
0
1x1
00 1x2
0 00 1x3
0 0 00 3x1
0
0
0
0
2x4
0 0 0 0
0 0 0 0
0](https://image.slidesharecdn.com/3-180103165216/85/Chapter-3-Linear-Systems-and-Matrices-Part-2-Slides-21-320.jpg)
![ Adding matrices means adding corresponding
elements, e.g.
Let A = [ aij ] and B = [ bij ] be two m x n matrices,
then C = A + B is a m x n matrix C = [ cij ] such that
cij = aij + bij for all i, j
Note: sizes of matrices must be the same
1 2 3 3 2 1 4 4 4
4 5 6 6 5 4 10 10 10
1 2 1 2 3
3 4 4 5 6
undefined
3.4 Matrix Operations: Matrix Addition](https://image.slidesharecdn.com/3-180103165216/85/Chapter-3-Linear-Systems-and-Matrices-Part-2-Slides-22-320.jpg)
![ Scalar multiplication means multiplying each element
of a matrix by the same scalar, e.g.
Let A = [ aij ] and r R
Then C = r A, where
C = [ cij ] is defined as cij = r aij i, j
1 2 2 4
2
3 4 6 8
3.4 Matrix Operations: Scalar Multiplication
4 1 3 8 2 6
2
2 5 0 4 10 0
](https://image.slidesharecdn.com/3-180103165216/85/Chapter-3-Linear-Systems-and-Matrices-Part-2-Slides-23-320.jpg)





![Defn. Let A = [ aij ] be an m x n matrix and let
B = [ bij ] be an q x p matrix.
The product of A and B is defined if and only if n=q
Then, AB = C = [ cij ], is the m x p matrix defined by
The product of B and A is defined if and only if m=p
Then, BA = D = [ dij ], is the q x n matrix defined by
1 1 2 2
1
for 1,2, , 1,2, ,
n
ij in nji j i jik kj
k
c a b a b a b a b i m j p
3.4 Matrix Operations: Matrix Multiplication
1 1 2 2
1
for 1,2, , 1,2, ,
m
ij in nji j i jik kj
k
d b a b a b a b a i q j n
](https://image.slidesharecdn.com/3-180103165216/85/Chapter-3-Linear-Systems-and-Matrices-Part-2-Slides-30-320.jpg)






![Let A [ aij ] be an m x n matrix.
The transpose of A, AT [ aij
T ], is the n x m matrix
defined by aij
T aji
T1 2 1 3
3 4 2 4
A A
3.4 Matrix Operations: Matrix Transpose
T 3
3 5
5
B B
T
1 2
1 3 4
3 5
2 5 6
4 6
C C](https://image.slidesharecdn.com/3-180103165216/85/Chapter-3-Linear-Systems-and-Matrices-Part-2-Slides-37-320.jpg)

![ An n x n matrix A [ aij ] is called upper triangular
if and only if aij 0 for i > j
An n x n matrix A [ aij ] is called lower triangular
if and only if aij 0 for i < j
Note:
A diagonal matrix is both upper and lower triangular
The n x n zero matrix is both upper and lower triangular
3.4 Special Matrices: Triangular Matrices](https://image.slidesharecdn.com/3-180103165216/85/Chapter-3-Linear-Systems-and-Matrices-Part-2-Slides-40-320.jpg)