Chapter 2 discusses constrained optimization in economic contexts, where optimization must consider specific constraints such as resource availability. It explores one-variable and two-variable optimization problems with equality constraints using methods like elimination and Lagrange multipliers. The chapter emphasizes the importance of constraints on scope and method in maximizing or minimizing economic functions.
![N-VARIABLE CASE:
1 2
( , , , )
n
z f x x x
1 2
( , , , )
n
g x x x c
1 2 1 2
( , , , ) [ ( , , , )]
n n
z f x x x c g x x x
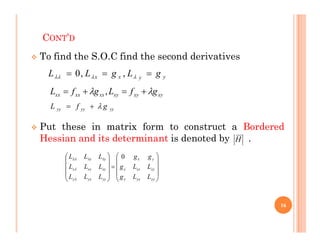
Objective function:
subject to
with
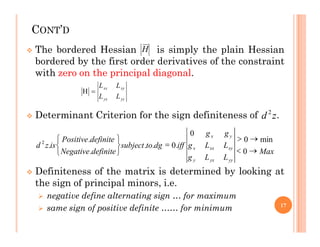
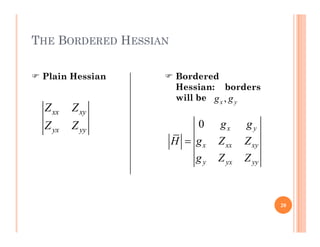
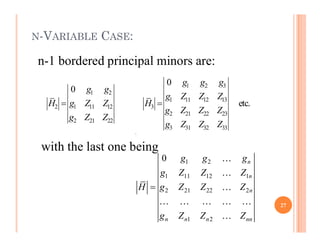
Given a bordered Hessian
Given a bordered Hessian
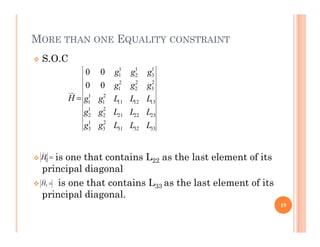
1 2
1 11 12 1
2 21 22 2
1 2
0 n
n
n
n n n nn
g g g
g Z Z Z
H g Z Z Z
g Z Z Z
26](https://image.slidesharecdn.com/chapter2-240528135328-67fdcfcb/85/Chapter-2-Constrained-Optimization-lecture-note-pdf-26-320.jpg)
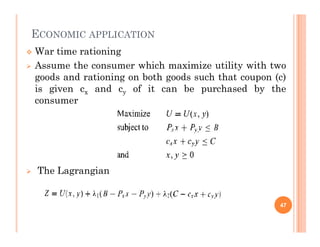
![EXAMPLE: LEAST COST COMBINATION OF INPUTS
K L
C P K P L
0
( , )
Q K L Q
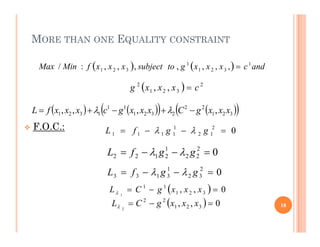
Minimize :
subject to:
First Order Condition:
0
0
[ ( , )]
( , ) 0
0
0
K L
K K K
L L L
K K
L L
Z P K P L Q Q K L
Z Q Q K L
Z P Q
Z P Q
P Q
P Q
First Order Condition:
29](https://image.slidesharecdn.com/chapter2-240528135328-67fdcfcb/85/Chapter-2-Constrained-Optimization-lecture-note-pdf-29-320.jpg)