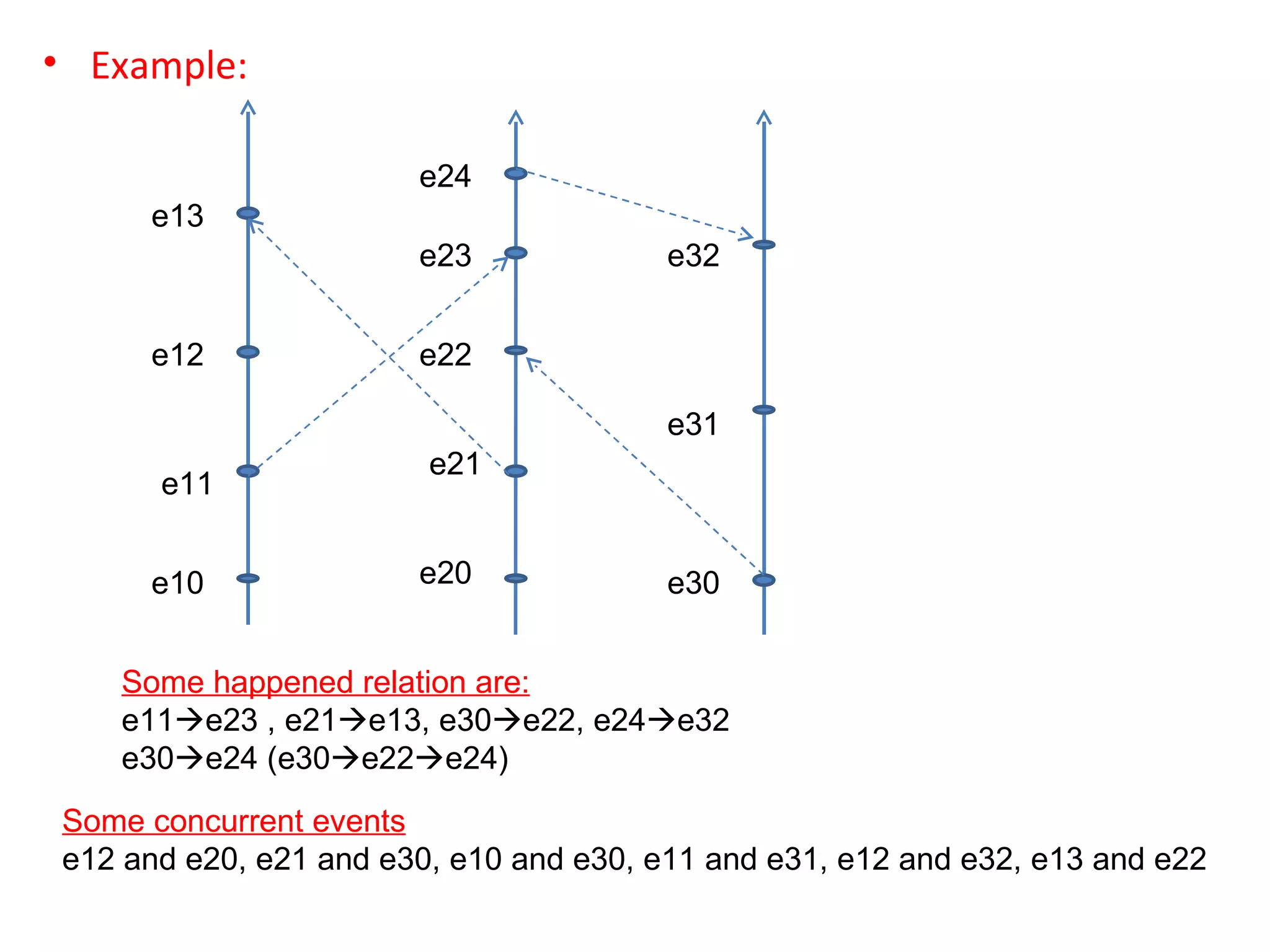
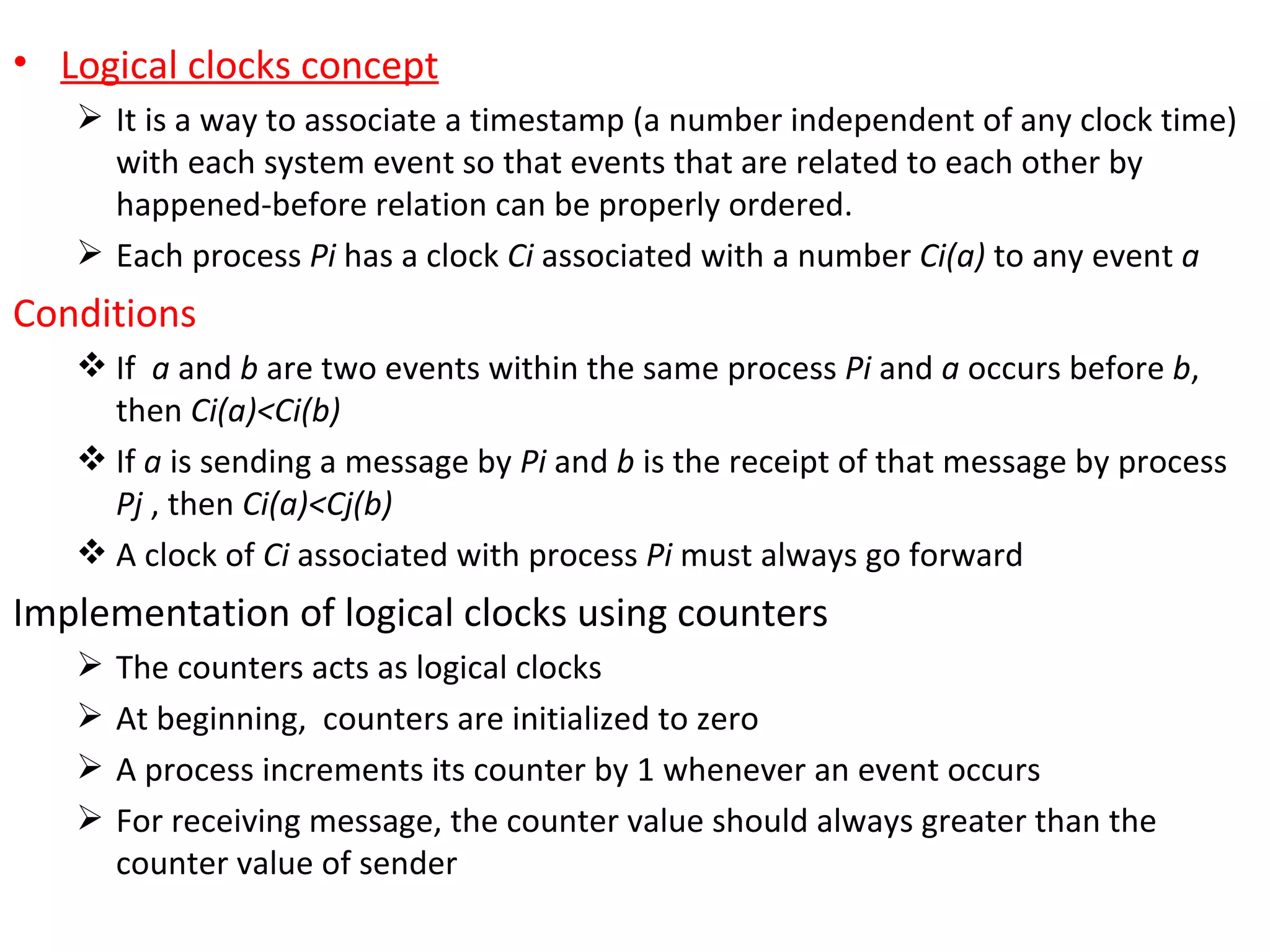
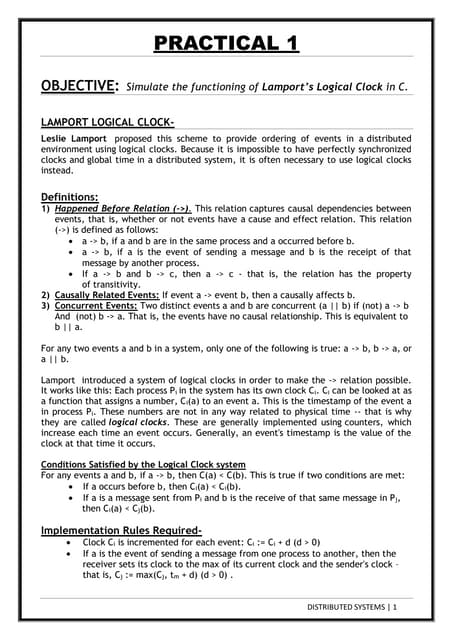
Chapter 5 discusses synchronization in distributed systems. Synchronization mechanisms are needed to enforce correct interaction between processes that share resources and run concurrently. Clock synchronization and event ordering are important synchronization techniques. Clock synchronization aims to keep clocks across distributed nodes close together despite unpredictable delays. It can be achieved through centralized or distributed algorithms. Event ordering ensures a total order of all events in a distributed system through happened-before relations and logical clocks.