Distributed Computing
Synchronization
Dr. MuhammadKhuram Shahzad
A-308
SEECS Faculty Block
Special thanks to Dr. Asad Waqar Malik for Course Materials, lectures, labs, and
course contents can be updated for the good.
2.
Why synchronization?
❏ Youwant to catch a bus at 6:00 pm, but your watch is off by 15
minutes
❏ What if your watch is late by 15 minutes?
❏ You will miss the bus!
❏ What if your watch is Fast by 15 minutes?
❏ You will end up waiting for a longer time
❏ Time Synchronization is required in both cases 2
3.
Synchronization In theCloud
❏ Consider Airline reservation system
❏ Server A receives a client request to purchase last ticket on flight ABC 123
❏ Server A timestamps purchase using local clock 9h:15m:32.45s and logs it.
❏ Replies ok to client
❏ That was the last seat. Server A send message to Server B saying “flight
full”
❏ B enters “Flight ABC 123 full” + its own local clock value (which reads
9h:10m:10.11s) into its log
❏ Server C queries A’s and B’s log. Is confused that a client purchased a ticket
at A after the flight became full at B
❏ This may lead to further incorrect actions by C 3
4.
A BaseBall Example
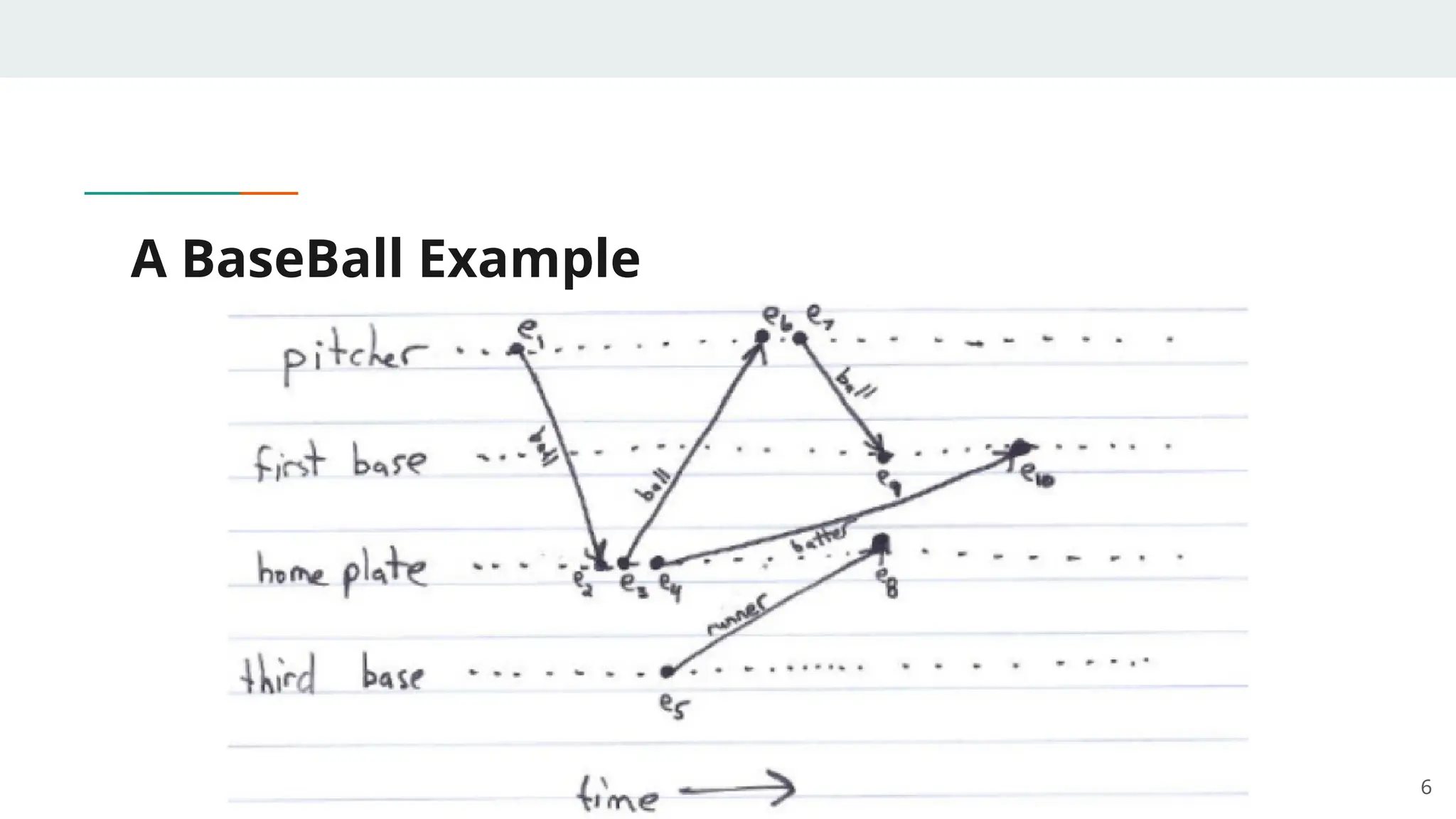
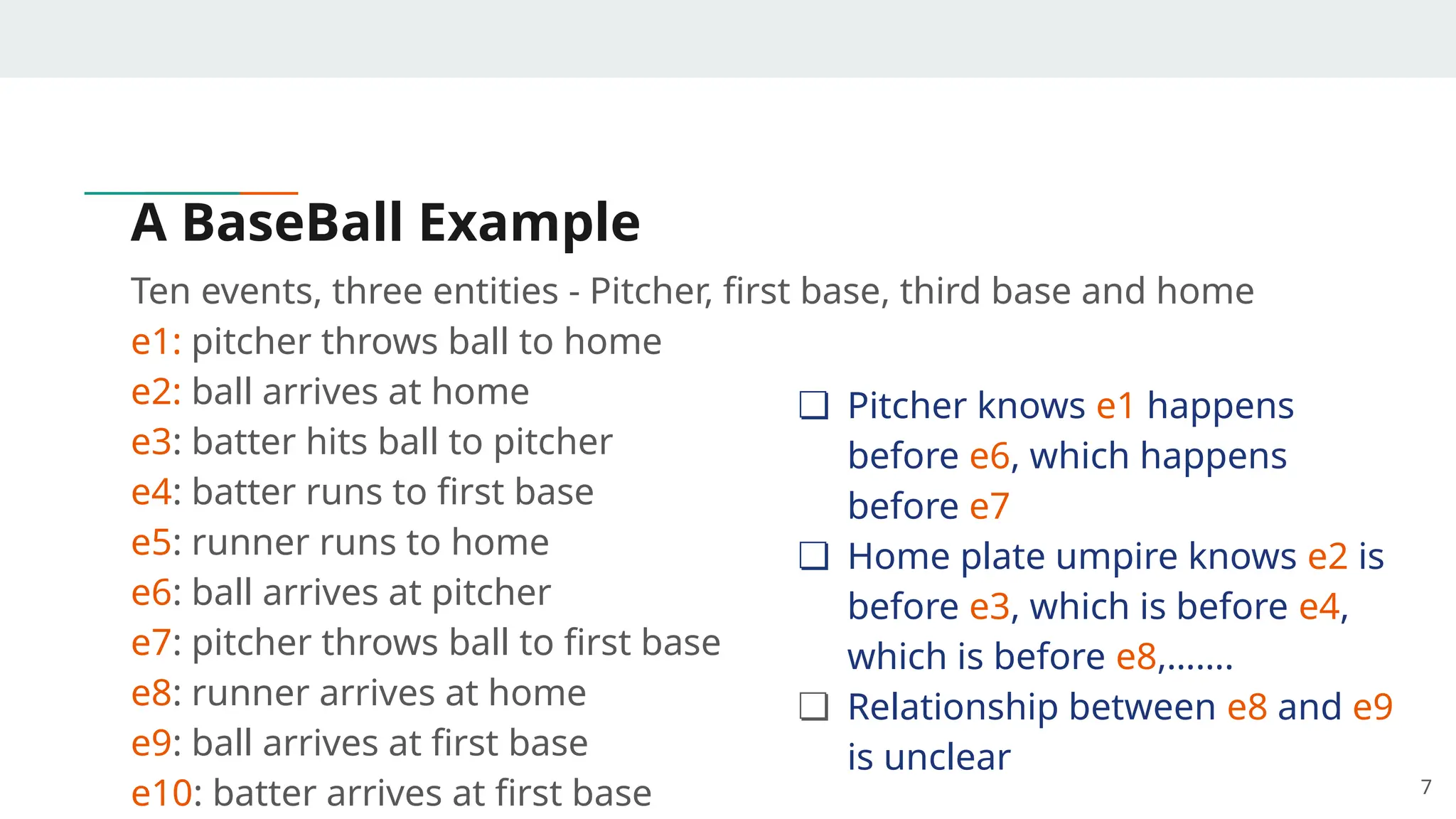
Tenevents, three entities - Pitcher, first base, third base and home
e1: pitcher throws ball to home
e2: ball arrives at home
e3: batter hits ball to pitcher
e4: batter runs to first base
e5: runner runs to home
e6: ball arrives at pitcher
e7: pitcher throws ball to first base
e8: runner arrives at home
e9: ball arrives at first base
e10: batter arrives at first base 4
5.
A BaseBall Example
Tenevents, three entities - Pitcher, first base, third base and home
e1: pitcher throws ball to home
e2: ball arrives at home
e3: batter hits ball to pitcher
e4: batter runs to first base
e5: runner runs to home
e6: ball arrives at pitcher
e7: pitcher throws ball to first base
e8: runner arrives at home
e9: ball arrives at first base
e10: batter arrives at first base 5
A BaseBall Example
Tenevents, three entities - Pitcher, first base, third base and home
e1: pitcher throws ball to home
e2: ball arrives at home
e3: batter hits ball to pitcher
e4: batter runs to first base
e5: runner runs to home
e6: ball arrives at pitcher
e7: pitcher throws ball to first base
e8: runner arrives at home
e9: ball arrives at first base
e10: batter arrives at first base 7
❏ Pitcher knows e1 happens
before e6, which happens
before e7
❏ Home plate umpire knows e2 is
before e3, which is before e4,
which is before e8,…….
❏ Relationship between e8 and e9
is unclear
8.
Ways to Synchronize…...
❏Send message from first base to home?
❏ Use a central timekeeper
❏ How long does this message take to arrive?
❏ Synchronize clocks before the game?
❏ Clock drift
8
9.
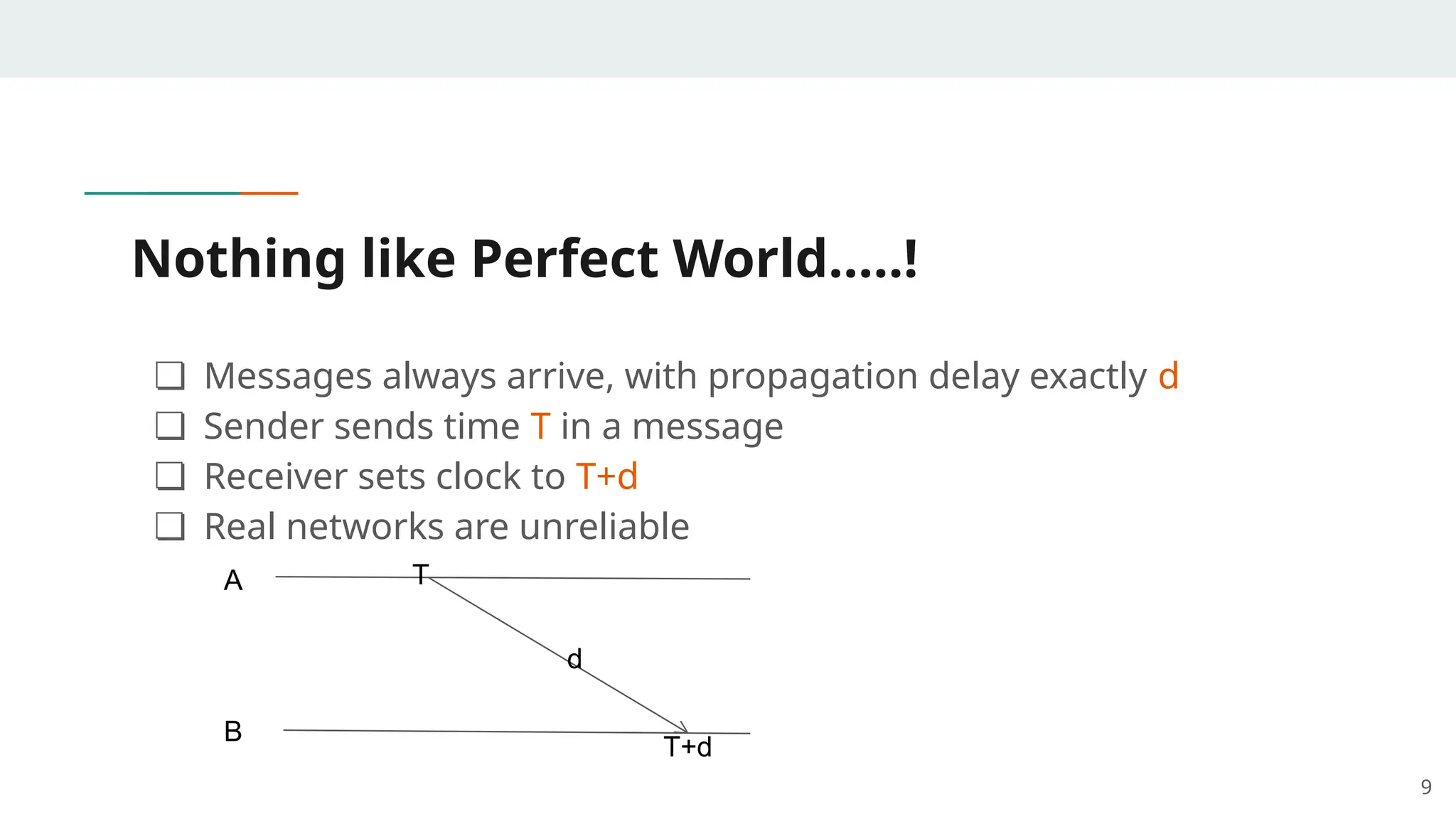
Nothing like PerfectWorld…..!
❏ Messages always arrive, with propagation delay exactly d
❏ Sender sends time T in a message
❏ Receiver sets clock to T+d
❏ Real networks are unreliable
9
T
d
T+d
A
B
Clock Synchronization -Topics
❏ Physical clock synchronization
❏ Cristian's algorithm
❏ The Berkeley Algorithm
❏ What is logical clock?
❏ Why we need logical clock?
11
12.
Physical Clock
❏ Computertimer is depend on quartz crystal
❏ Crystal oscillate at well defined frequency
❏ Frequency depend on kind of crystal, how crystal is cut, tension
wire
Associate with crystal, two registers
❏ Counter
❏ holding register
❏ Each oscillation, decrement the counter, on zero interrupt
generated and counter reloaded from holding register 12
13.
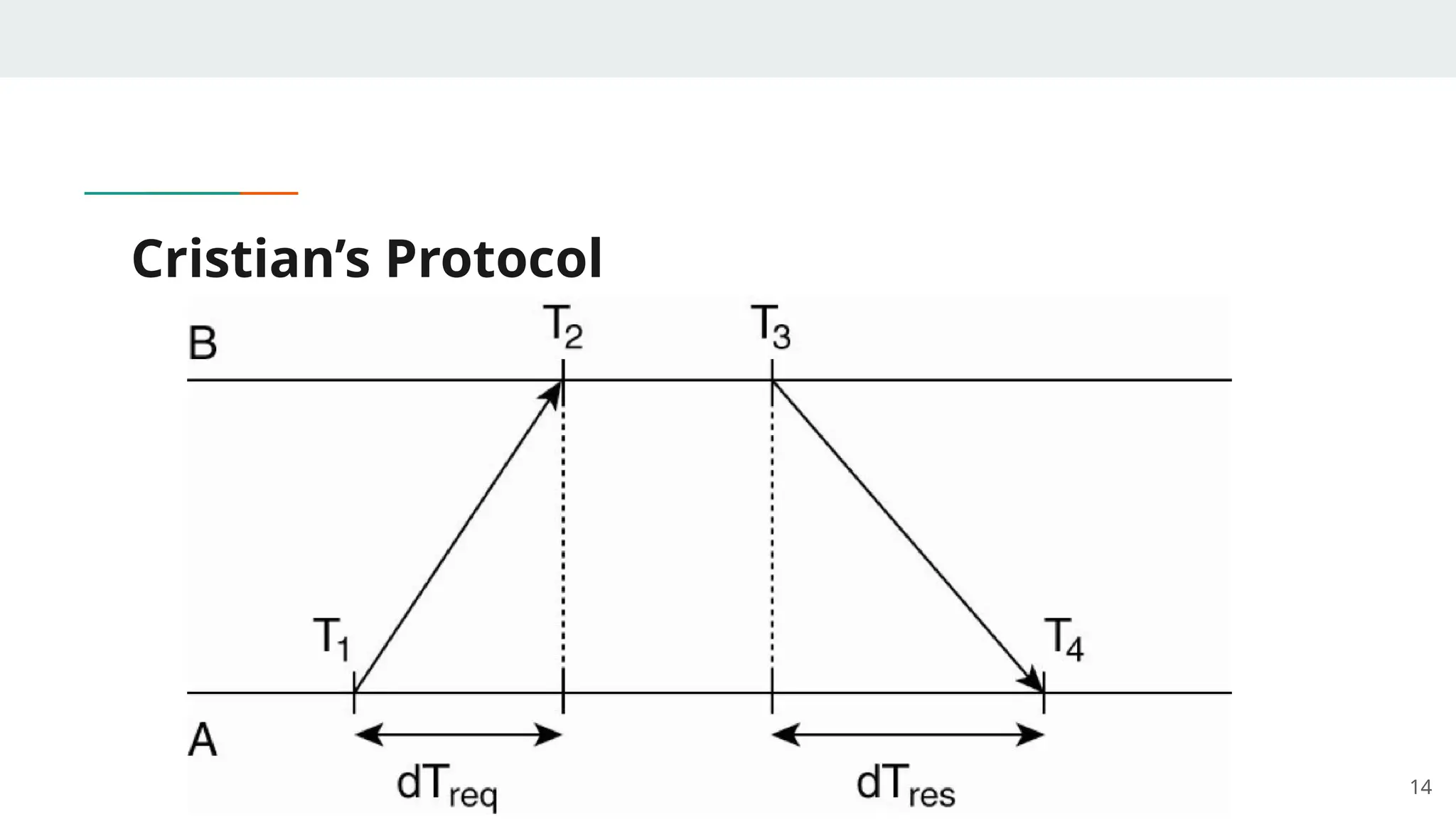
Cristian’s Protocol
❏ Proposedin 1989, commonly used in many protocols
❏ Server is passive
❏ Server is equipped with accurate clock or receiver
❏ Client request the server for time
❏ The problem is message delay outdated the reported time
13
Cristian’s Protocol
❏ Asend a request to B with timestamped T1
❏ B in turn will record the time of receipt T2
❏ Return response with T3, piggyback with T2
❏ A records the time of the response arrival T4
❏ Assume propagation delay is roughly the same from A-B, B-A
15
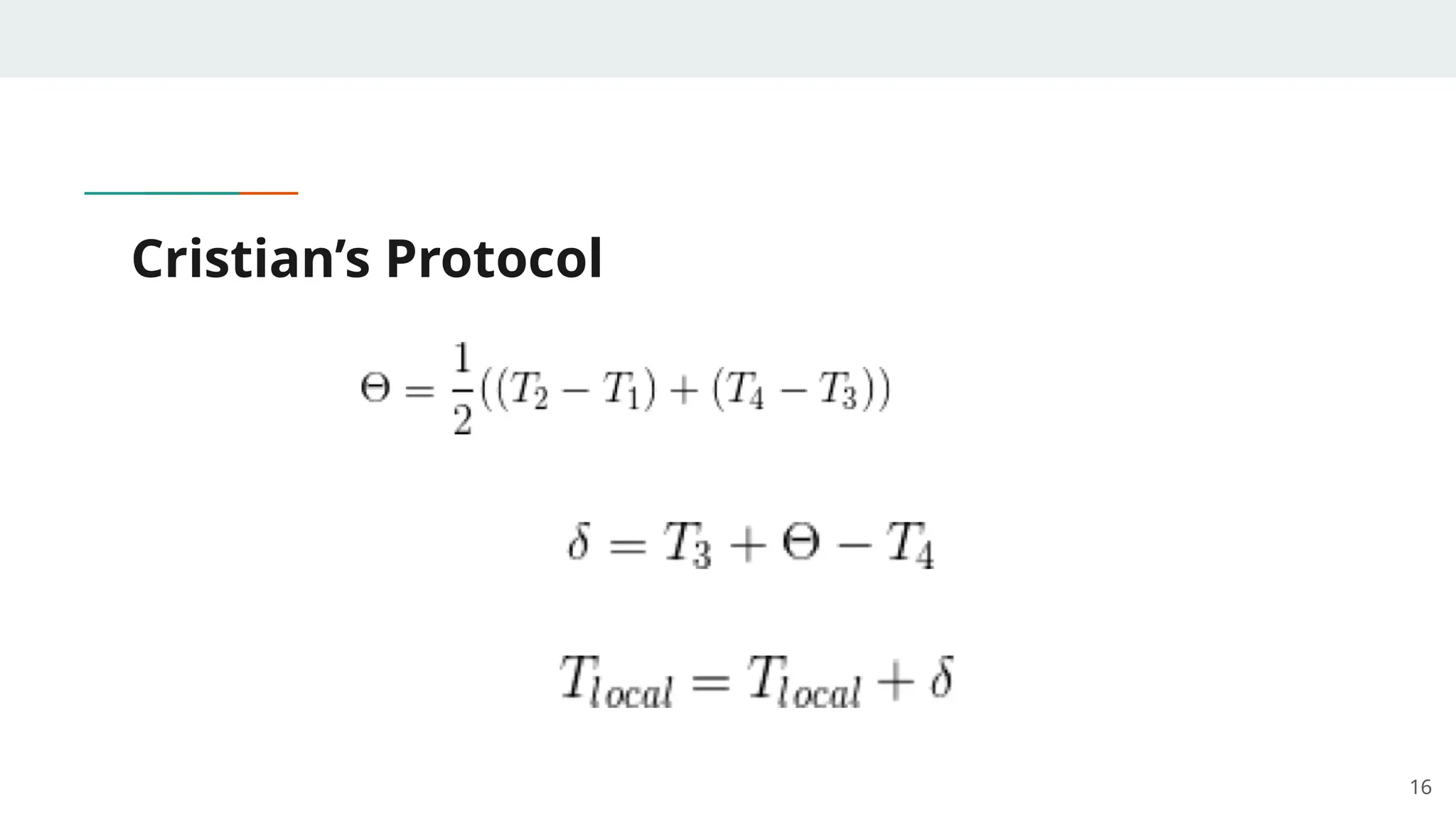
Cristian’s Protocol -Network Time Protocol
❏ In NTP, B will also probe A for its current time
❏ The offset is computed as given above
❏ The delay estimation is calculated as
❏ delay = [(T2 - T1) + (T4 - T3) ]/2
❏ Eight pair of values are buffered (offset, delay)
❏ Finally taking the minimum value as the best estimation
17
18.
The Berkeley Algorithm
❏The Berkeley algorithm is a method of clock synchronization
which assumes no machine has an accurate time source
❏ It was developed by Gusella and Zatti at the University of
California, Berkeley in 1989
❏ intended for use within intranets
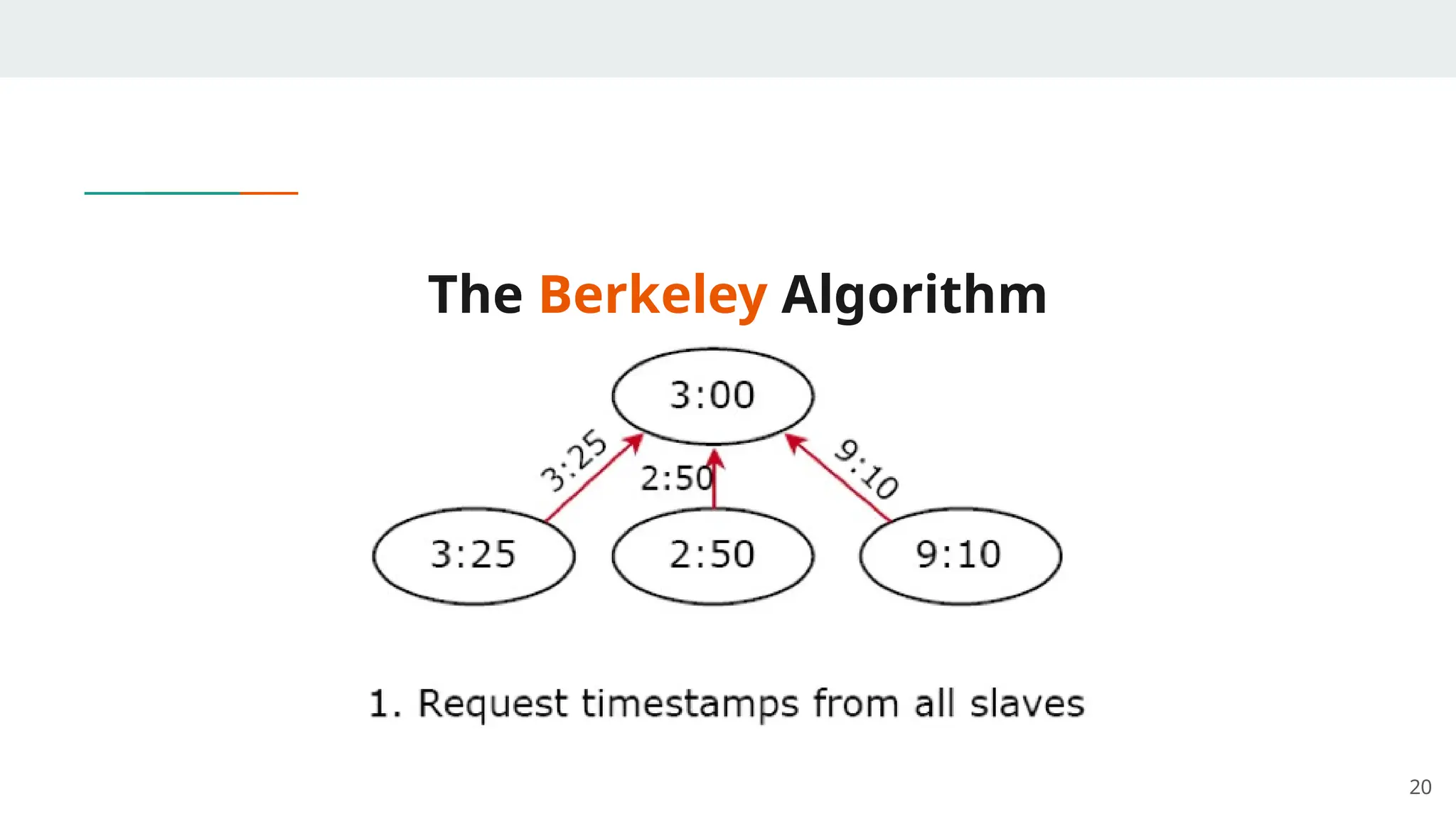
❏ The server process in the Berkeley algorithm, called the master,
periodically polls other slave processes.
18
19.
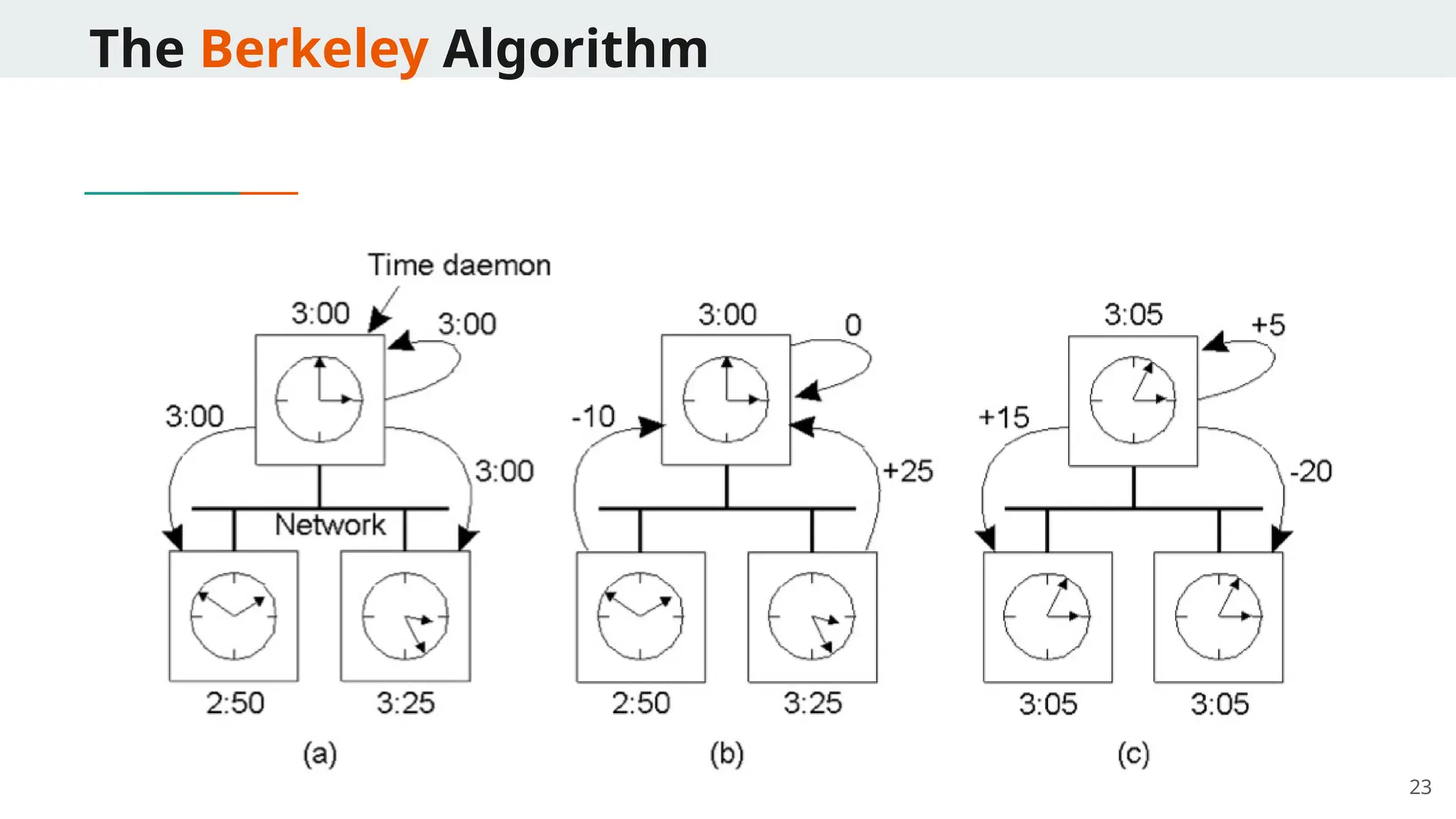
The Berkeley Algorithm
❏A master is chosen via an election process
❏ The master polls the slaves who reply with their time
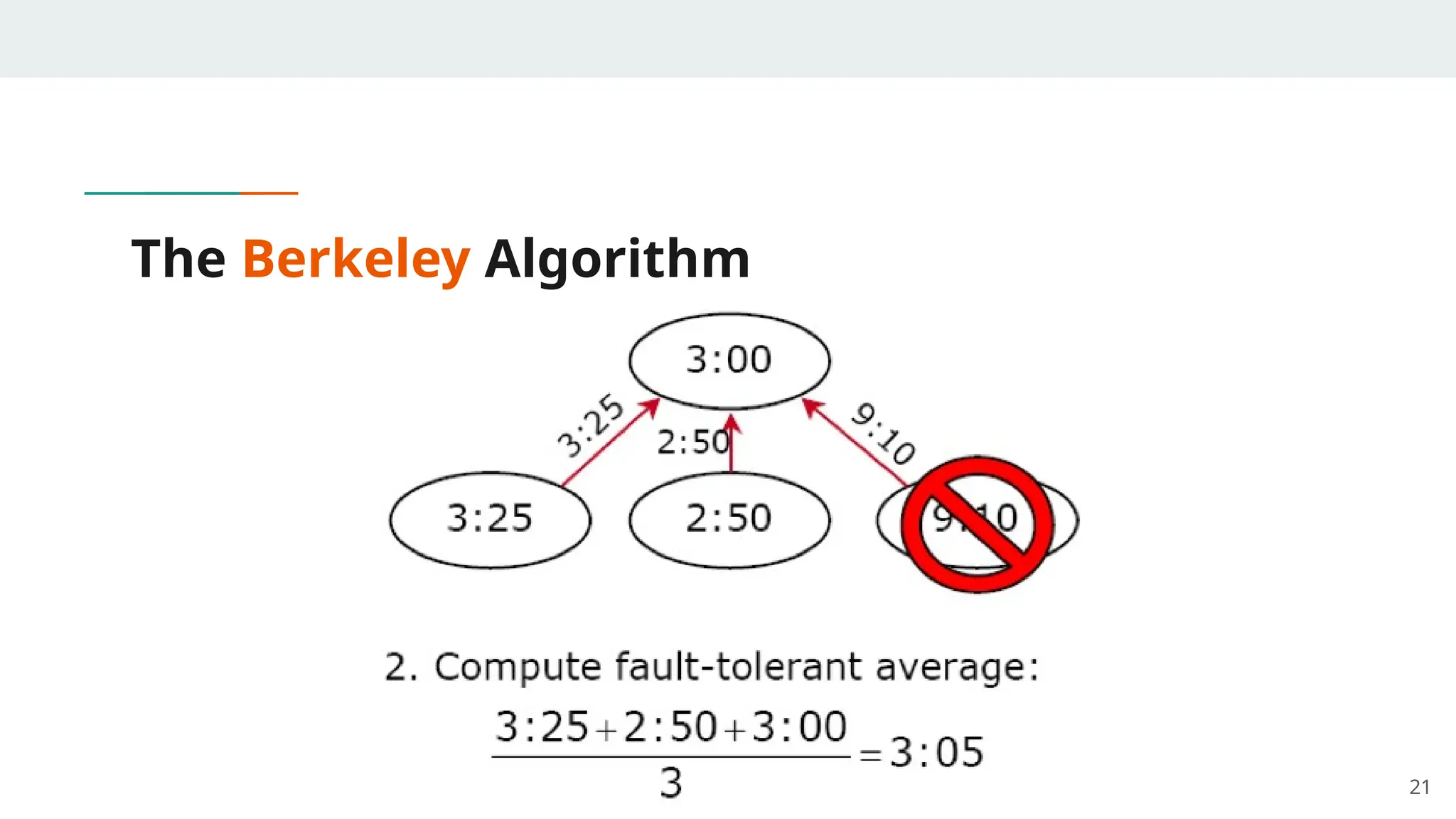
❏ The master then averages the clock times
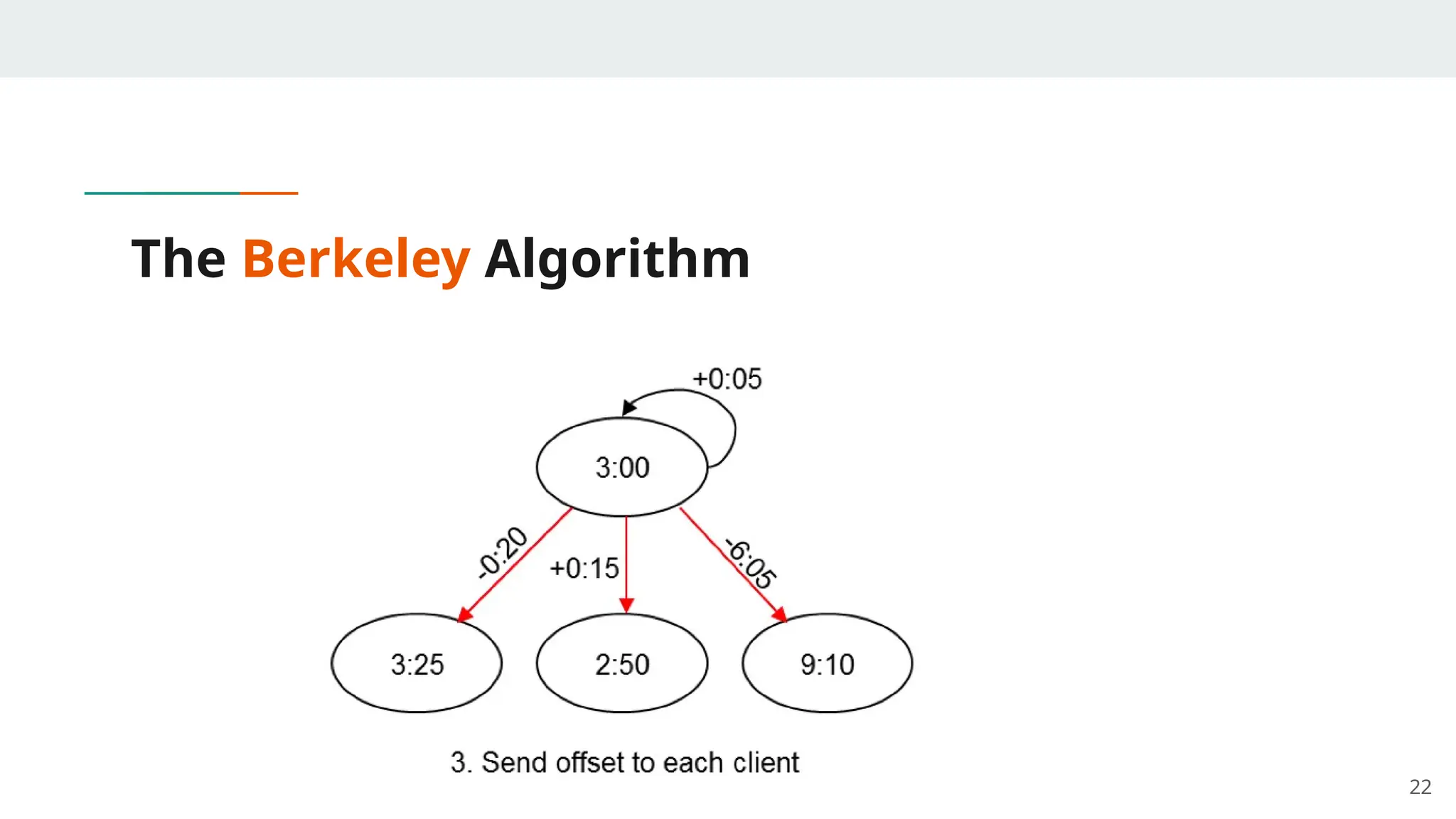
❏ Instead of sending the updated current time, the master then
sends out the amount (positive or negative) that each slave must
adjust its clock. This avoids further uncertainty due to RTT at the
slave processes
19
Logical Clock
❏ ConsiderUNIX make program again
❏ How much source and object file is outdated
❏ Thats speak for the logical clock
26
27.
Lamport’s Logical Clocks
❏if two process do not interact, it is not necessary their clocks be
synchronized lack of synchronization would not be observable
❏ It does not matter all processes would agree on what time it is
rather they agree on the order in which event occurs
❏ In make program what matters is input.c is older or newer
than input.o Not their absolute time creation
27
28.
Lamport’s Logical Clocks
❏Define a relationship “happens-before”
❏ a -> b read a happens before b
❏ Happens before relation can be observed in two situations:
❏ 1). a and b are two events and a occurs before b, then a -> b is
true
❏ 2). if a the event of message being sent by one process and b is
the event of message received by another process then a -> b is
also true
28
29.
Lamport’s Logical Clocks
❏Happen-before is a transitive relationship
❏ Concurrent events
❏ Two events x and y happen in different processes do not
exchange messages
x -> y or y -> x
29
30.
Lamport’s Logical Clocks
❏Need a way to measure a notion of time, for every event ‘a’ we
can assign a time value C(a)
❏ if a -> b then C(a) < C(b) ’a’ and ‘b’ occur on same process
❏ ’a’ is sending of a message by one process and ‘b’ is receiving of a
message by another process then
❏ C(a) < C(b) must be assign, everyone agrees
❏ Lamport propose for assigning times to events
30
31.
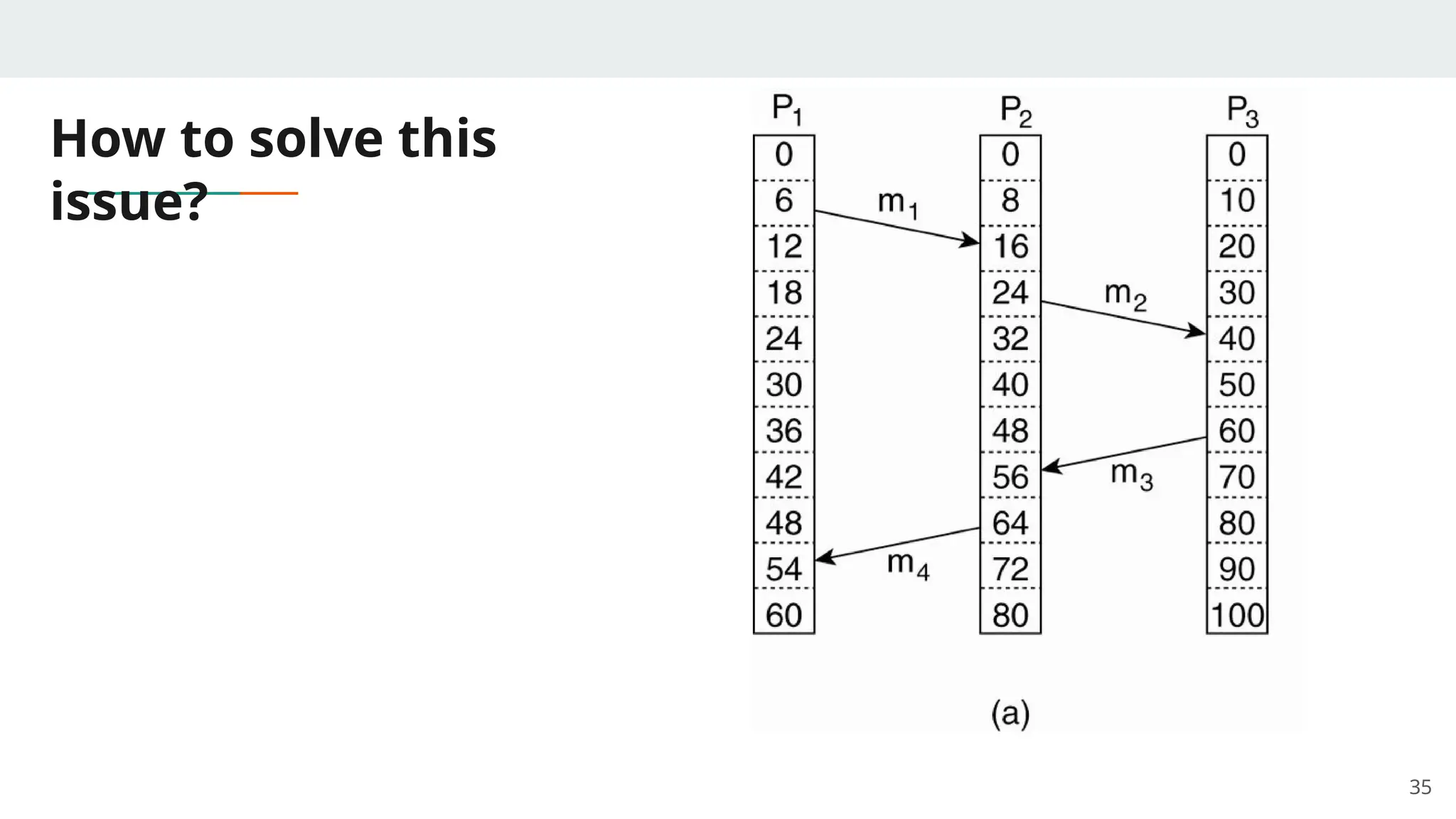
Lamport’s Logical Clocks
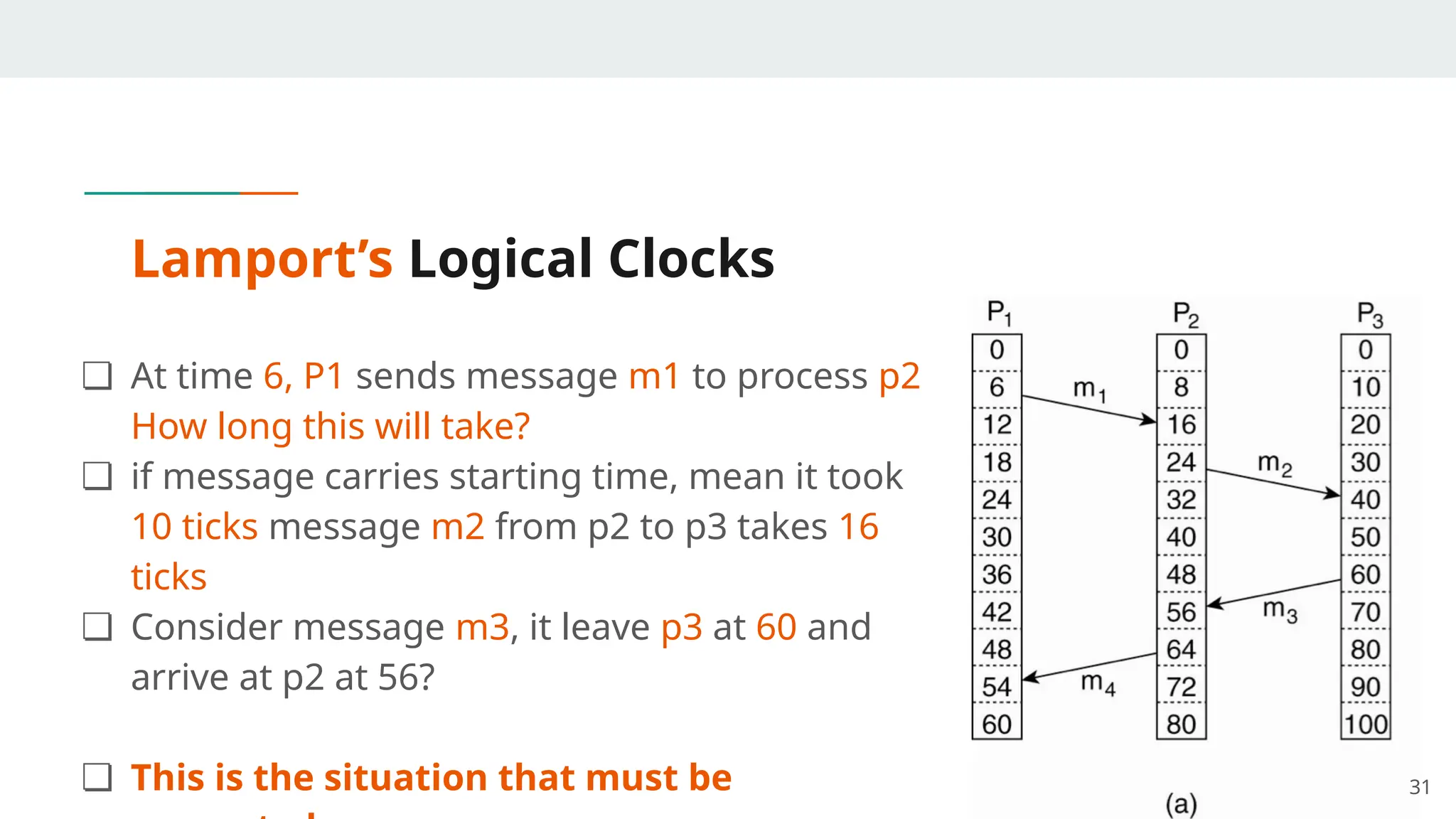
❏At time 6, P1 sends message m1 to process p2
How long this will take?
❏ if message carries starting time, mean it took
10 ticks message m2 from p2 to p3 takes 16
ticks
❏ Consider message m3, it leave p3 at 60 and
arrive at p2 at 56?
❏ This is the situation that must be 31
32.
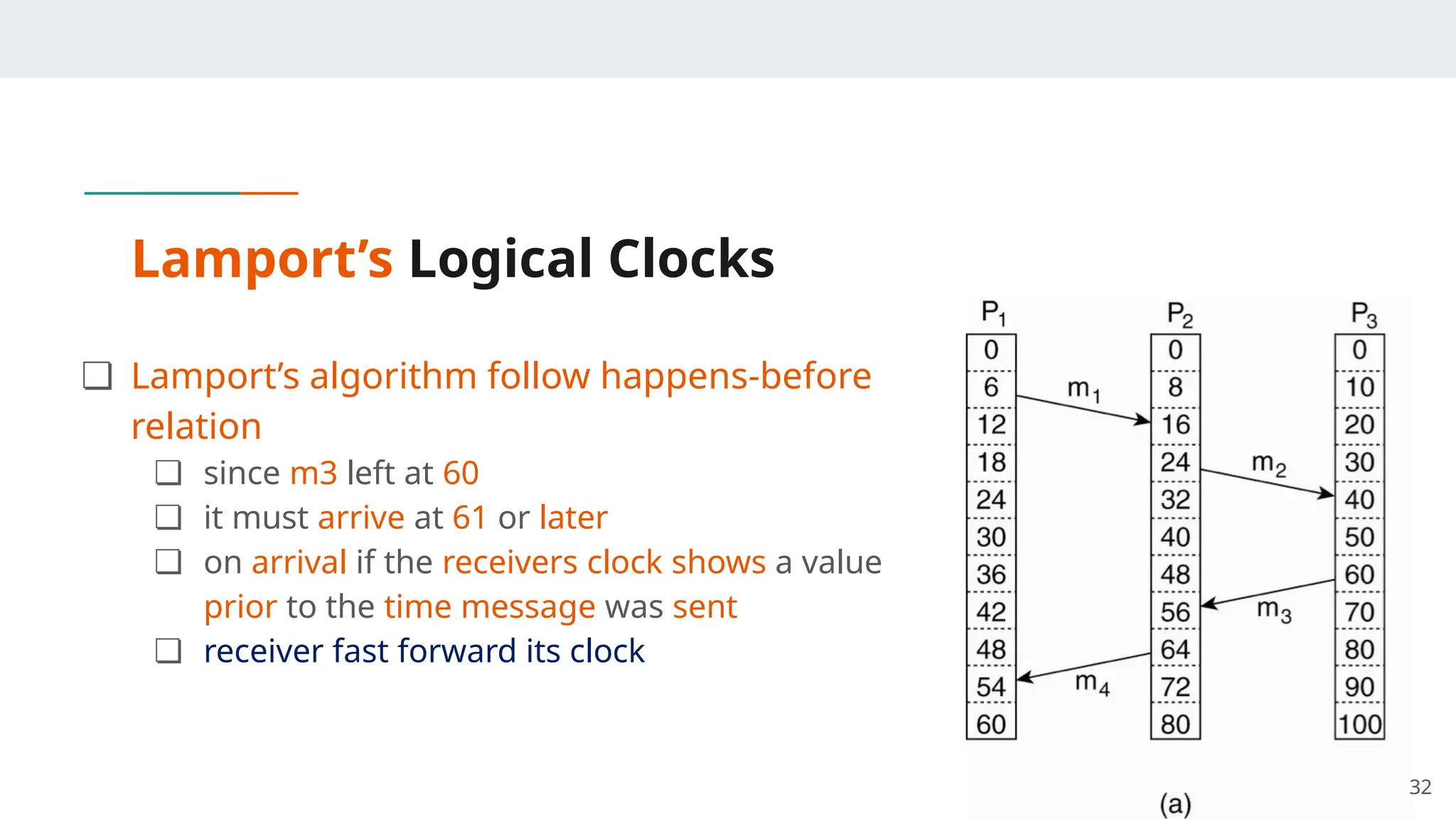
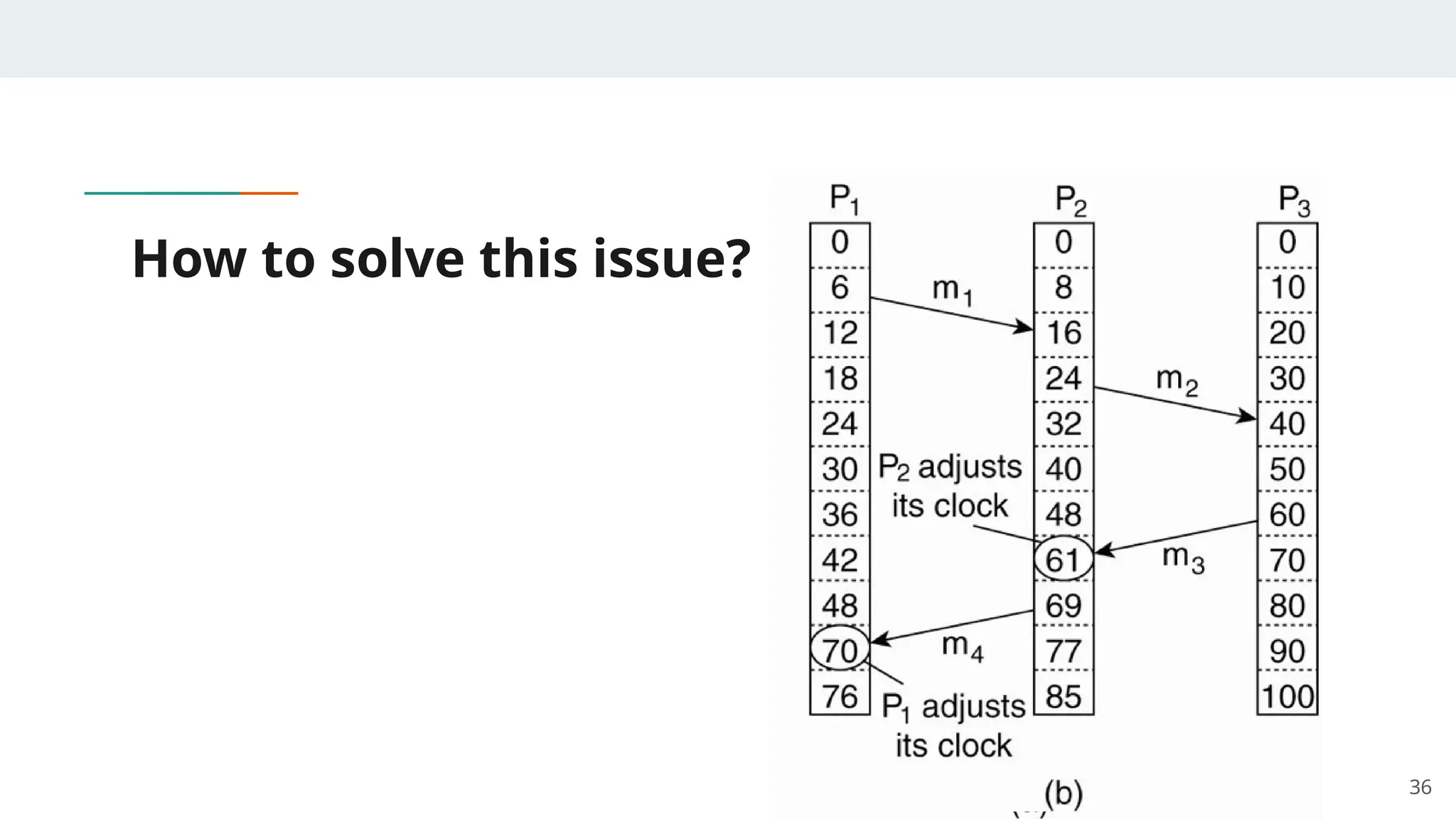
Lamport’s Logical Clocks
❏Lamport’s algorithm follow happens-before
relation
❏ since m3 left at 60
❏ it must arrive at 61 or later
❏ on arrival if the receivers clock shows a value
prior to the time message was sent
❏ receiver fast forward its clock
32
33.
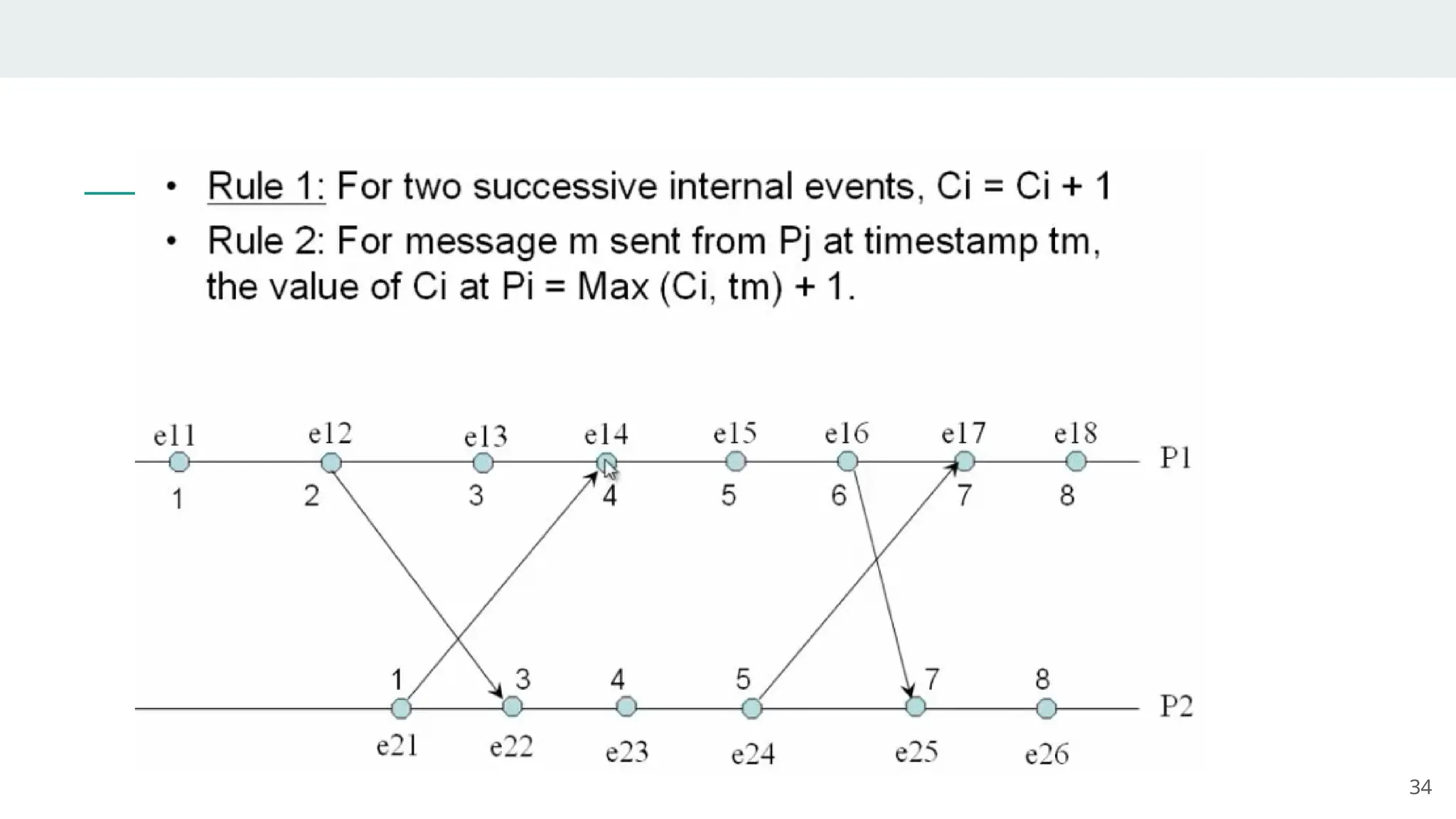
Lamport’s Logical ClocksImplementation
❏ Lamport’s logical clocks implementation
❏ Each process maintain a local counter Ci
1). Before executing any event, Pi executes Ci = Ci + 1
2). When Pi send a message m to Pj its set m’s timestamp equal
to Ci after executing previous step
3).Upon receipt of a message m, Pj adjusts its own local counter
as Cj max {Cj , m(ts) } and execute the step-1 and deliver the
message to the application
33
Case Study -Synchronization
In some situations, an additional requirement is desirable, i.e. no two
events ever occur at exactly at the same time. How will your
implementation ensure such a behavior with n process; where 0 < n <
1000
41
42.
Case Study -Synchronization
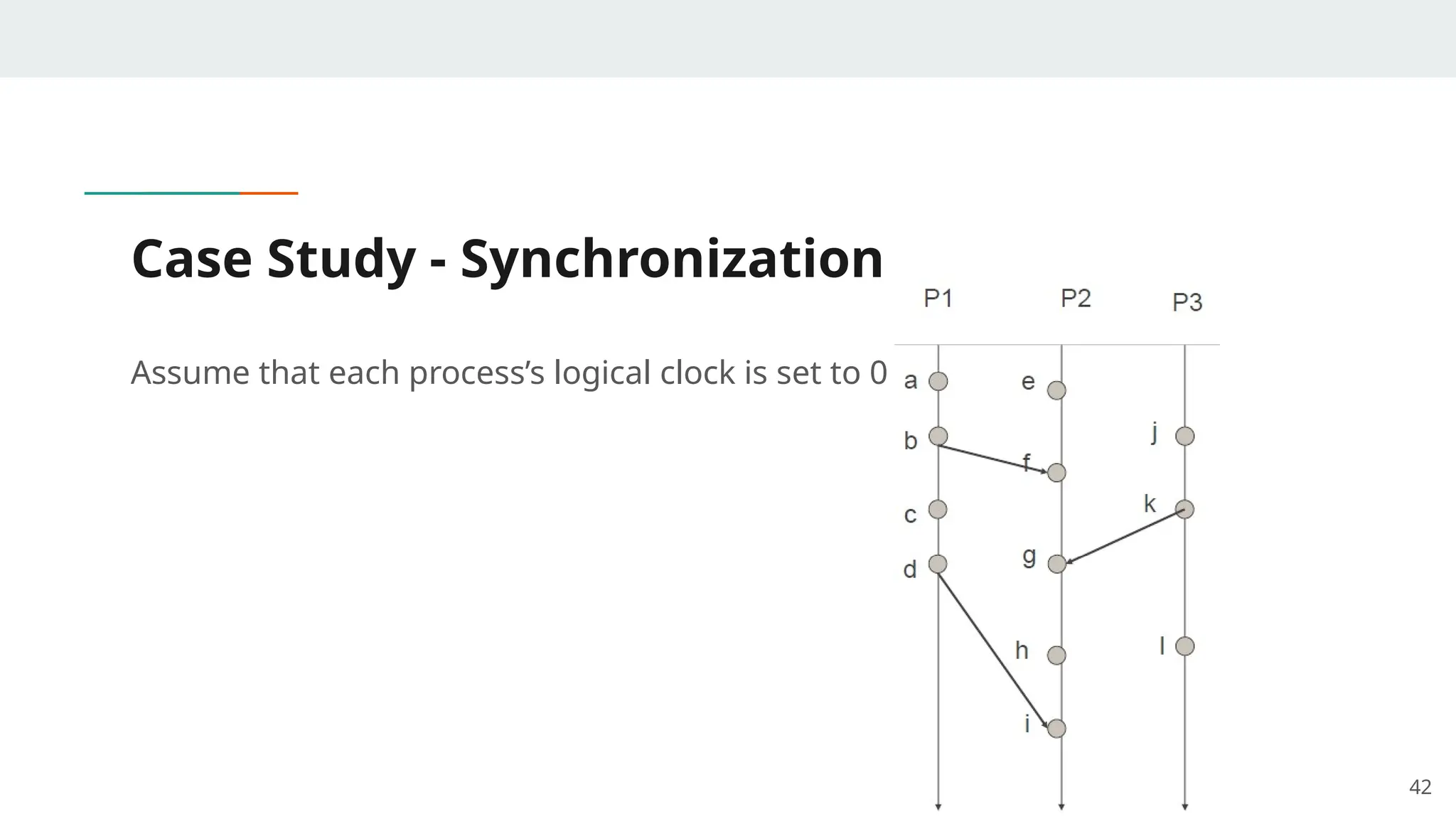
Assume that each process’s logical clock is set to 0
42
43.
Case Study -Synchronization
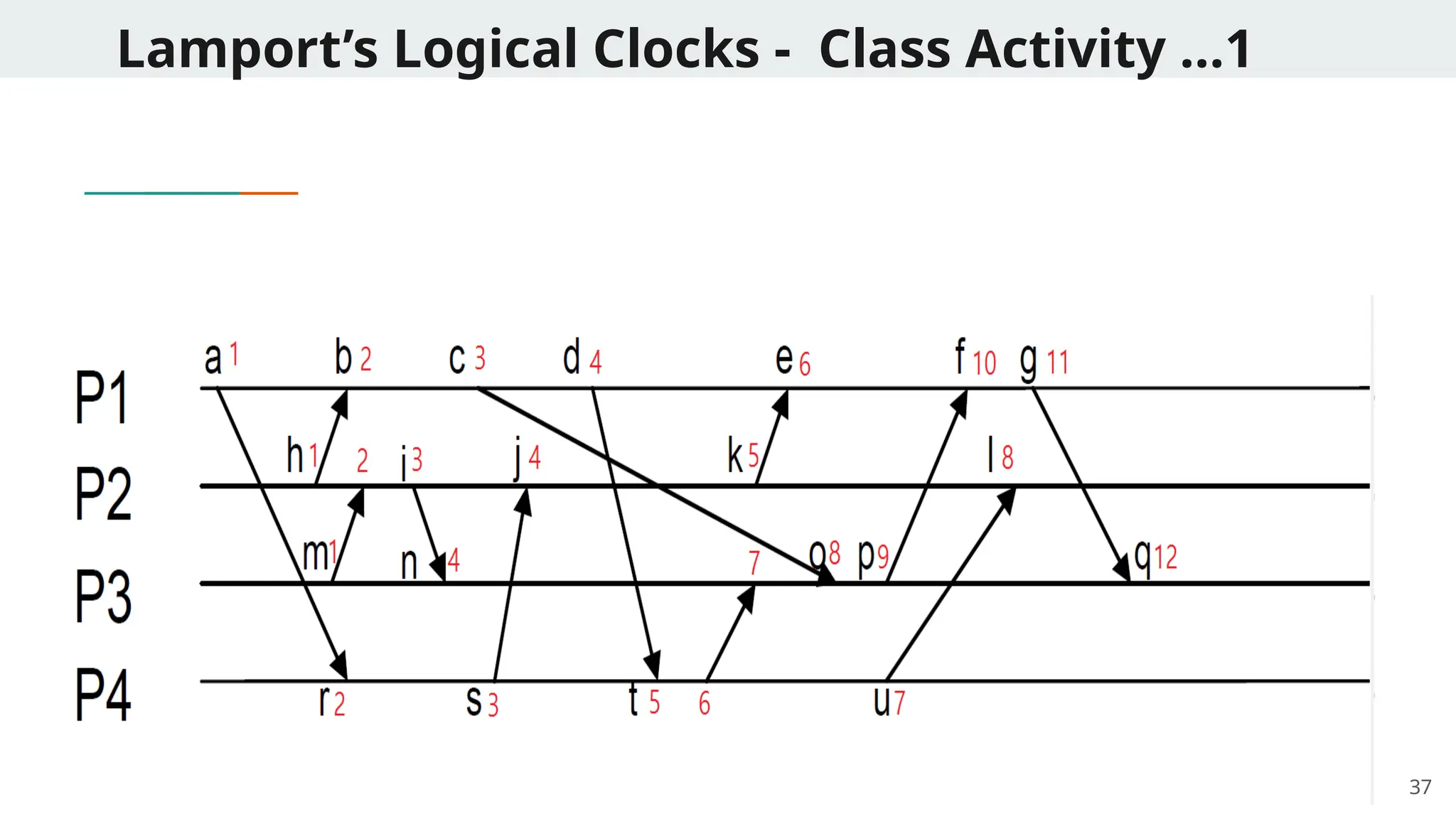
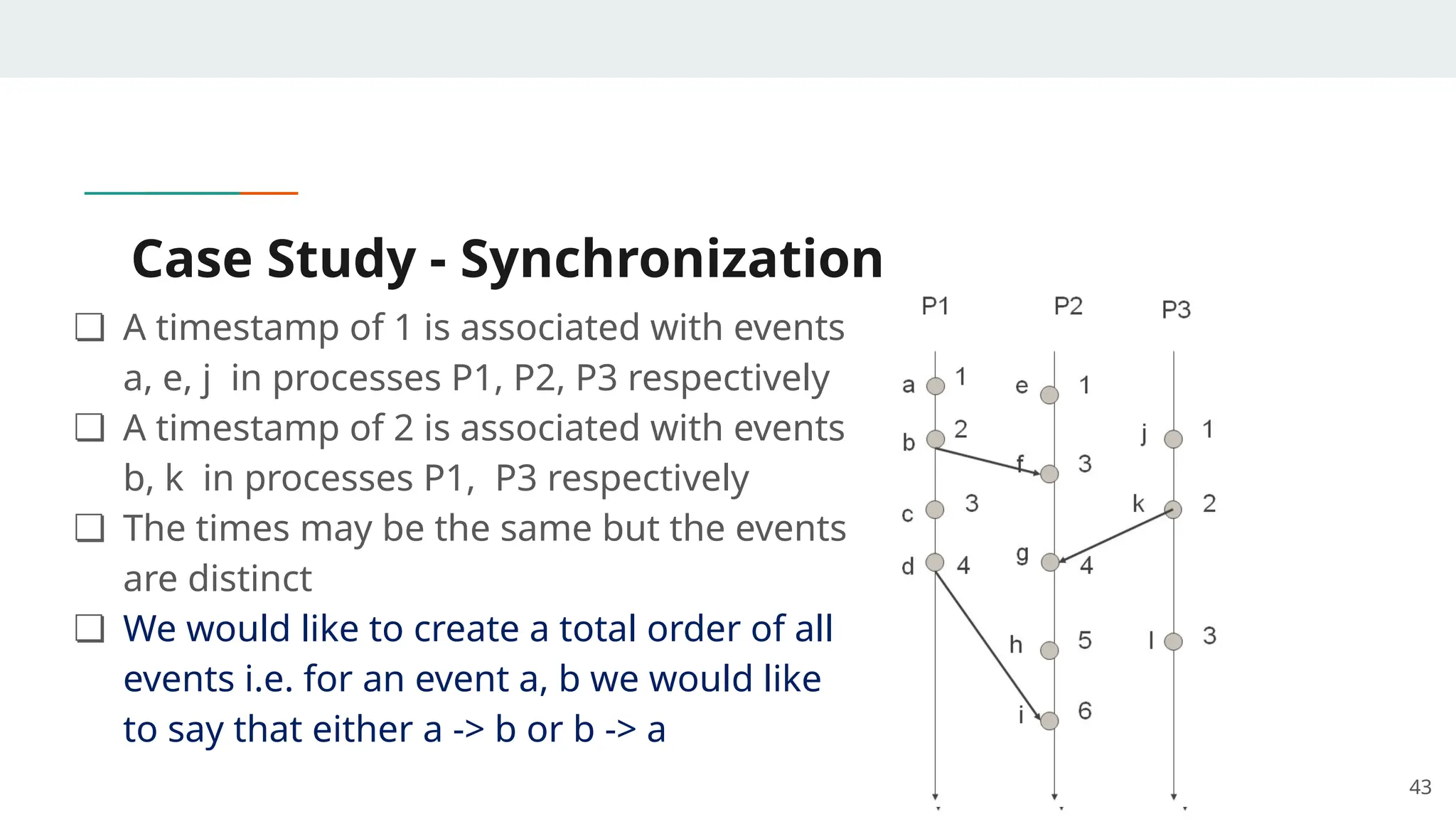
❏ A timestamp of 1 is associated with events
a, e, j in processes P1, P2, P3 respectively
❏ A timestamp of 2 is associated with events
b, k in processes P1, P3 respectively
❏ The times may be the same but the events
are distinct
❏ We would like to create a total order of all
events i.e. for an event a, b we would like
to say that either a -> b or b -> a
43
44.
Example: Totally-Ordered Multicast
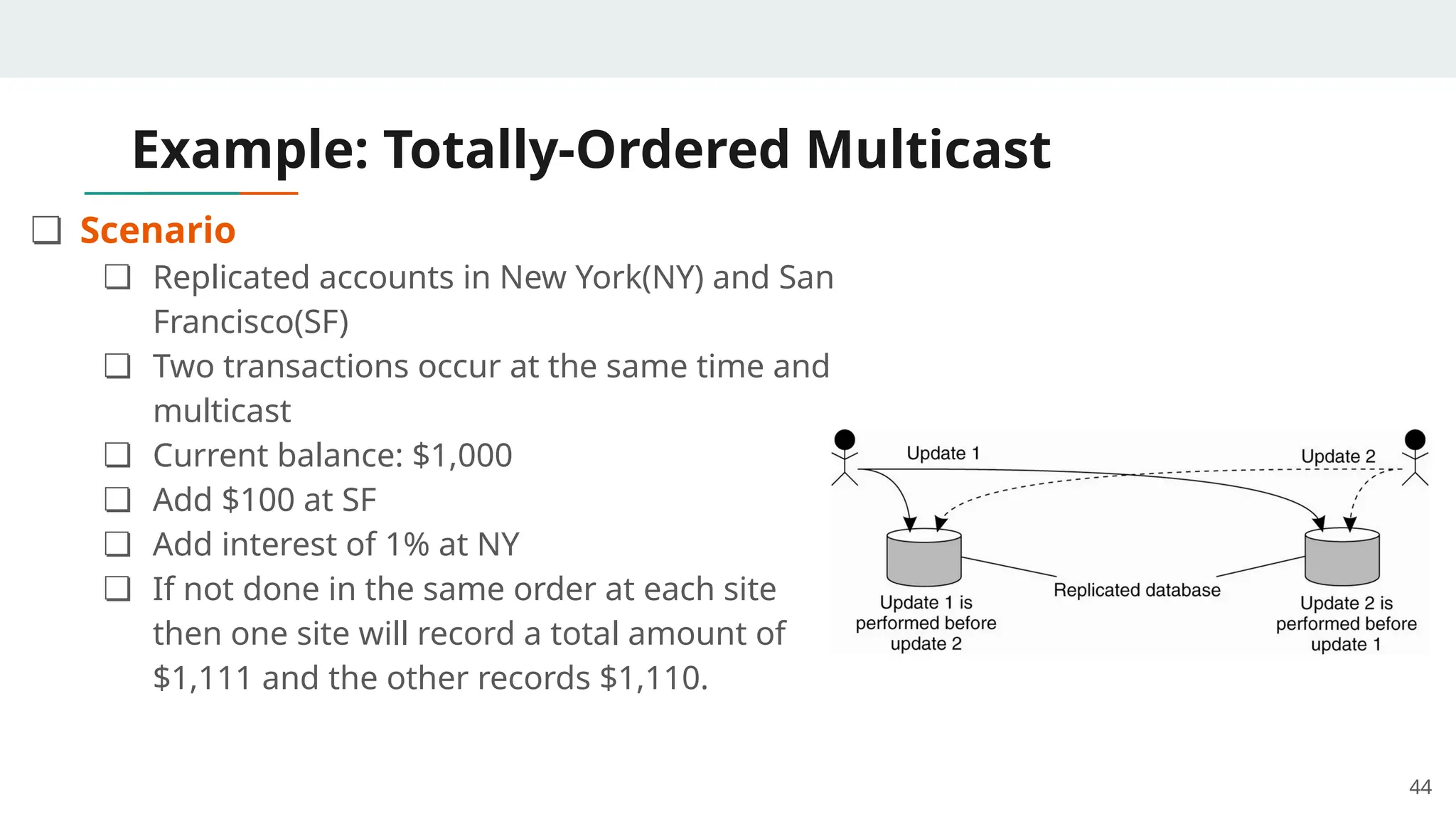
❏Scenario
❏ Replicated accounts in New York(NY) and San
Francisco(SF)
❏ Two transactions occur at the same time and
multicast
❏ Current balance: $1,000
❏ Add $100 at SF
❏ Add interest of 1% at NY
❏ If not done in the same order at each site
then one site will record a total amount of
$1,111 and the other records $1,110.
44
45.
Example: Totally-Ordered Multicast
❏We must ensure that the two update operations are performed in the
same order at each copy
❏ Although it makes a difference whether the deposit is processed before
the interest update or the other way around, it does matter which order
is followed from the point of view of consistency
❏ We need totally-ordered multicast, that is a multicast operation by which
all messages are delivered in the same order to each receiver.
❏ NOTE: Multicast refers to the sender sending a message to a collection
of receivers.
45
46.
Algorithm: Totally-Ordered Multicast
1)Update message is time stamped with sender’s logical time
2) Update message is multicast (including sender itself)
3) When message is received
4) put into local queue
5) Ordered according to timestamp,
6) Multicast acknowledgement
46
47.
Algorithm: Totally-Ordered Multicast
❏Message is delivered to applications only when
❏ It is at head of queue
❏ It has been acknowledged by all involved processes
❏ Pi sends an acknowledgement to Pj if
❏ Pi has not made an update request
❏ Pi’s identifier is greater than Pj’s identifier
❏ Pi’s update has been processed;
❏ Lamport algorithm (extended for total order) ensures total
ordering of events
47
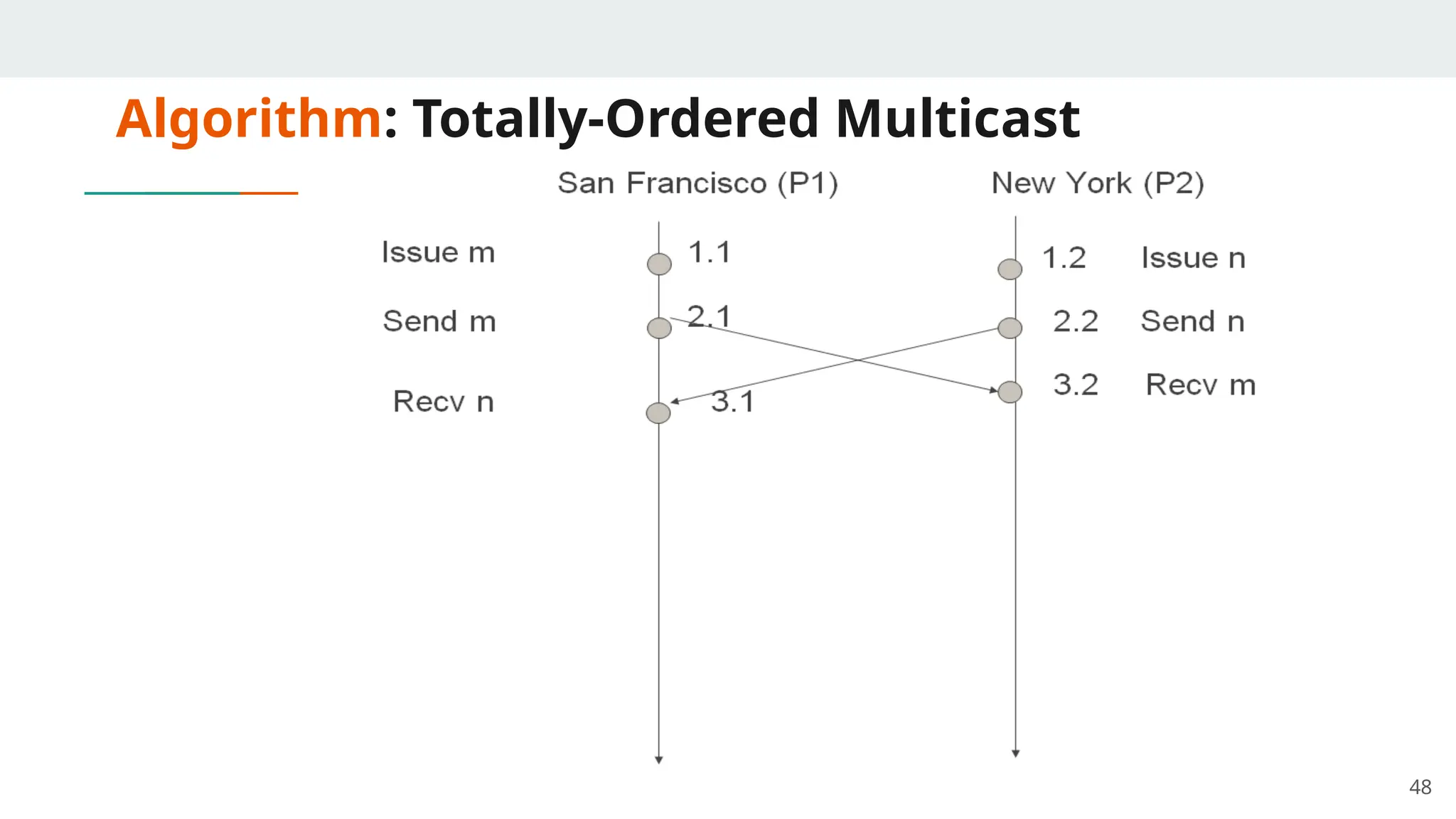
Algorithm: Totally-Ordered Multicast
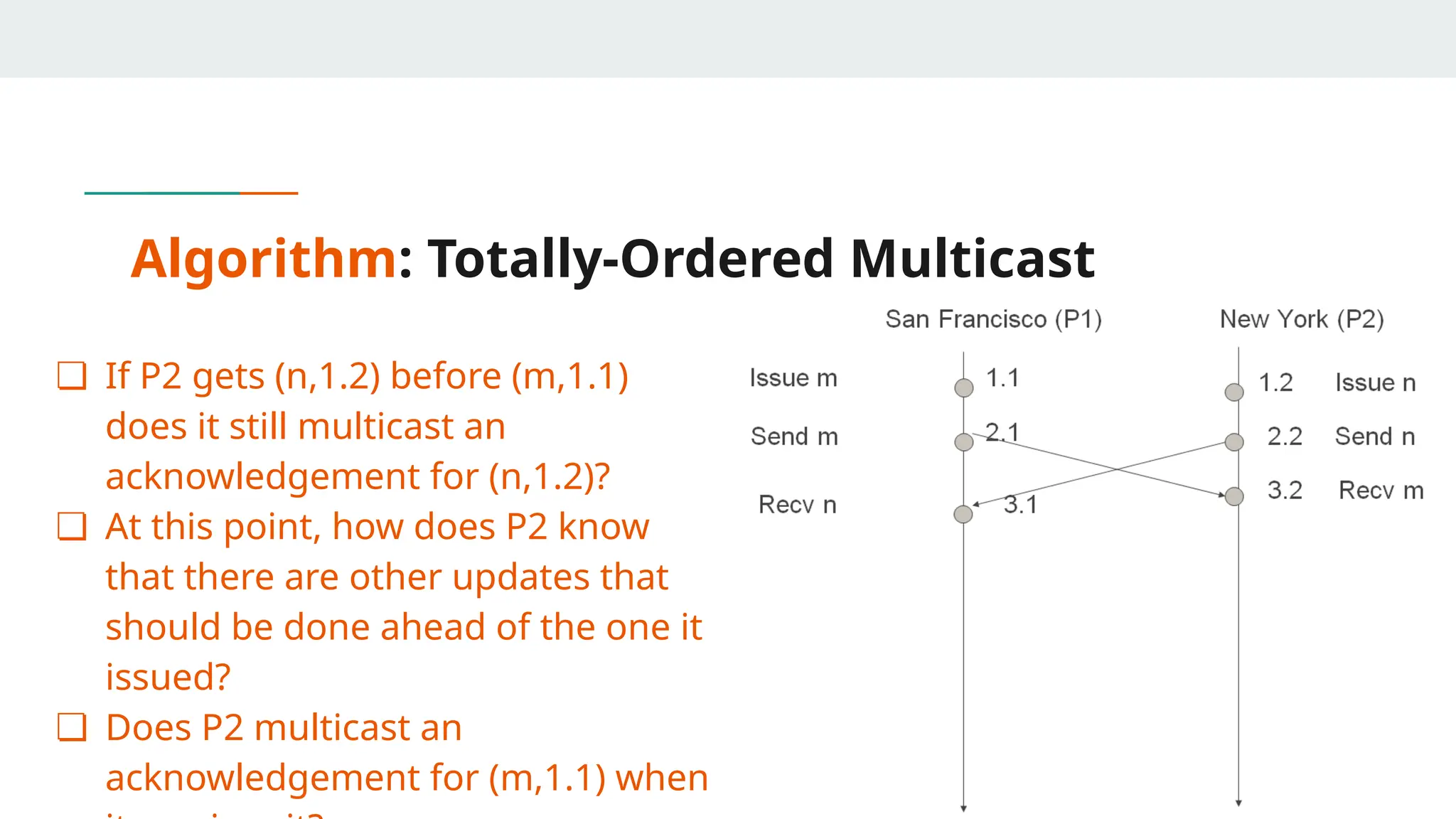
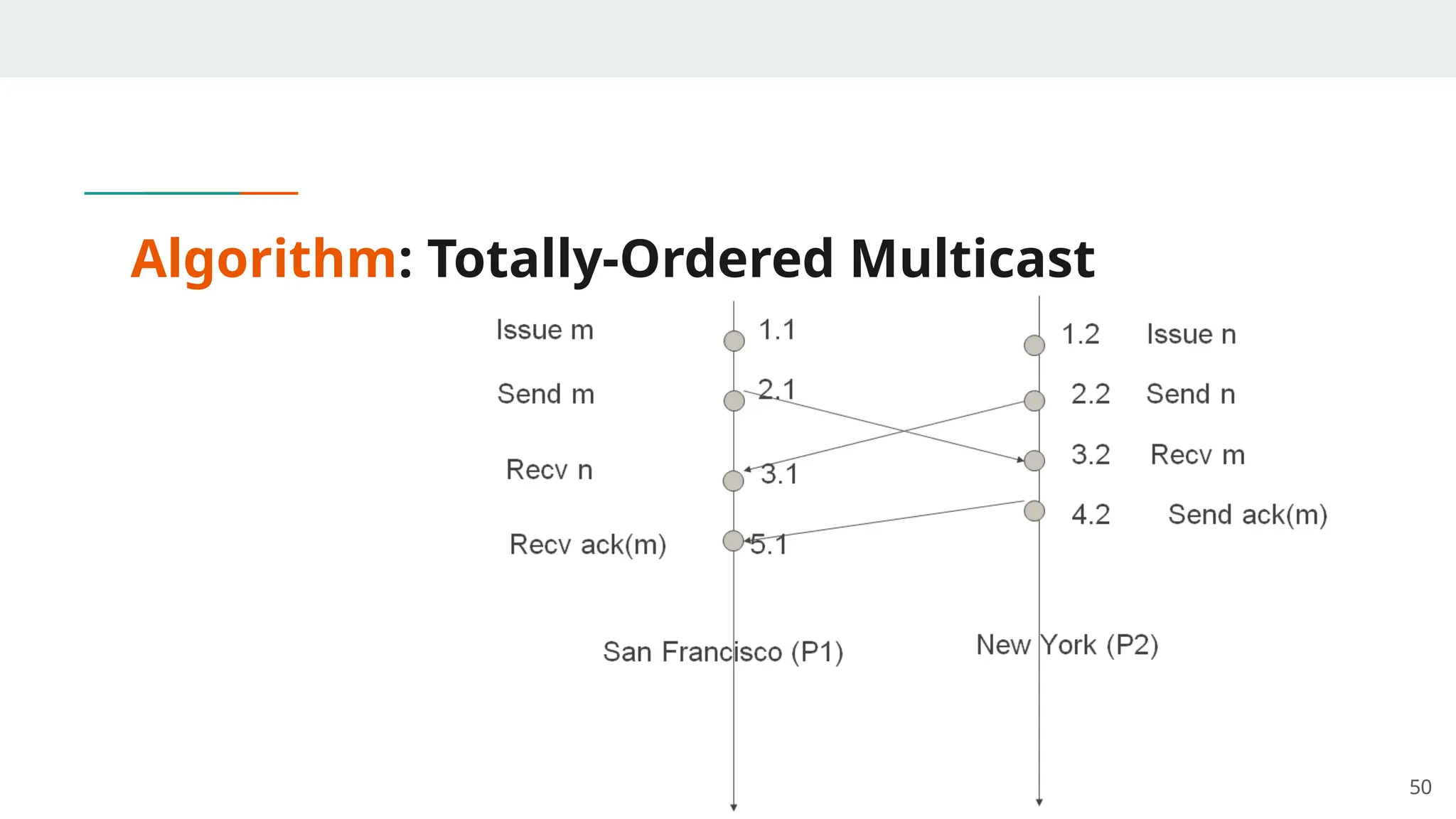
❏If P2 gets (n,1.2) before (m,1.1)
does it still multicast an
acknowledgement for (n,1.2)?
❏ At this point, how does P2 know
that there are other updates that
should be done ahead of the one it
issued?
❏ Does P2 multicast an
acknowledgement for (m,1.1) when 49
Algorithm: Totally-Ordered Multicast
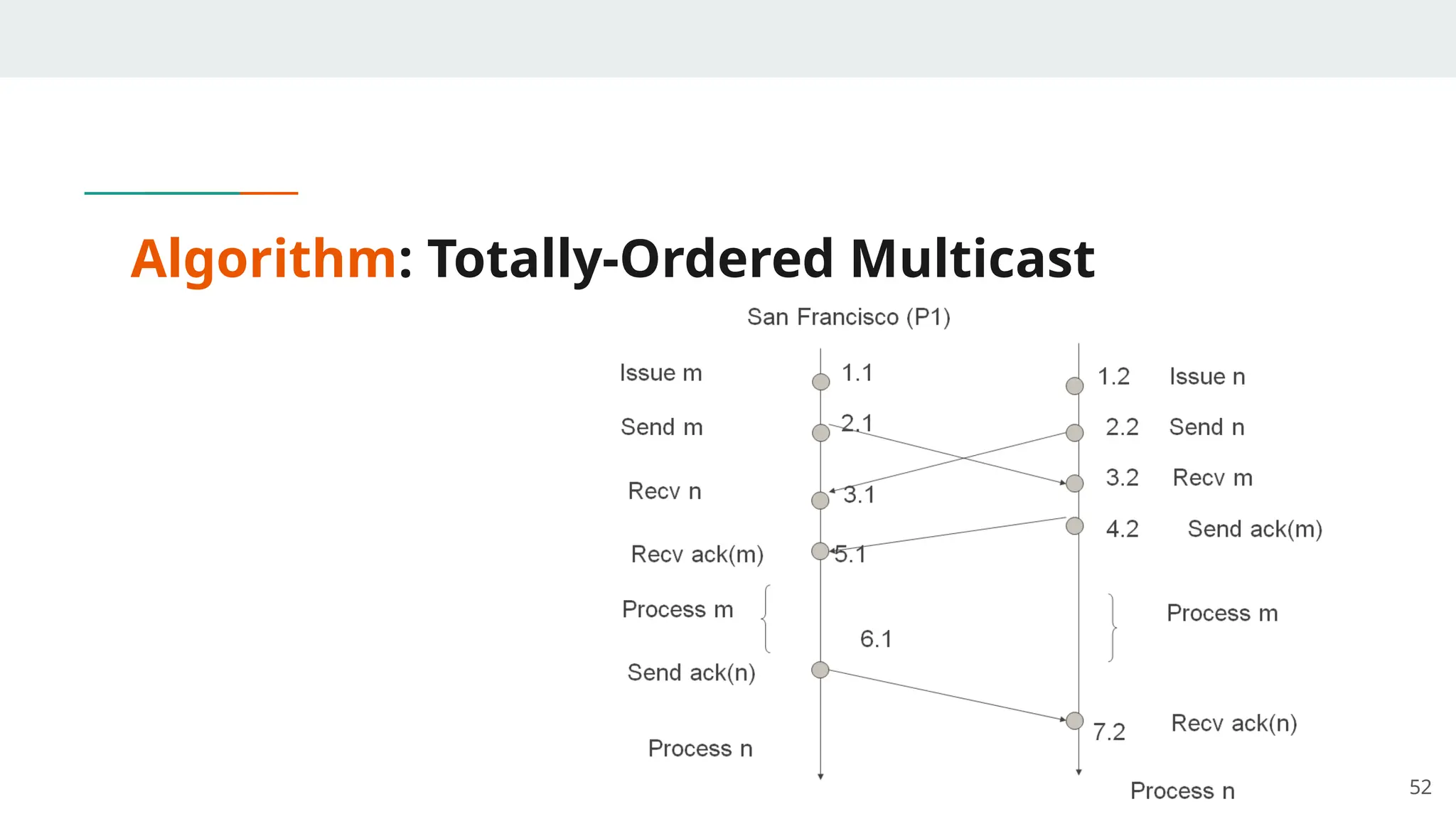
❏To summarize, the following messages have been sent:
❏ P1 and P2 have issued update operations
❏ P1 has multicasted an acknowledgement message for (m,1.1)
❏ P2 has multicasted acknowledgement messages for (m,1.1),
(n,1.2)
❏ P1 and P2 have received an acknowledgement message from
all processes for (m,1.1)
❏ Hence, the update represented by m can proceed in both P1
and P2 51
Vector Clocks
❏ Problemwith Lamport’s algorithms is based on happens before
relation
❏ In Lamport clock nothing can be said about relationship between
two events a and b by looking C(a) and C(b)
54
55.
Motivation to VectorClock
Logical clock - Event s happens before event t => the logical clock
value of s is smaller than the logical clock value of t.
Vector clock - Event s happens before event t means the vector clock
value of s is “smaller” than the vector clock value of t
Each event has a vector of n integers as its vector clock value
❏ v1 = v2 if all n fields same
❏ v1 v2
≤ if every field in v1 is less than or equal to the
corresponding field in v2
55
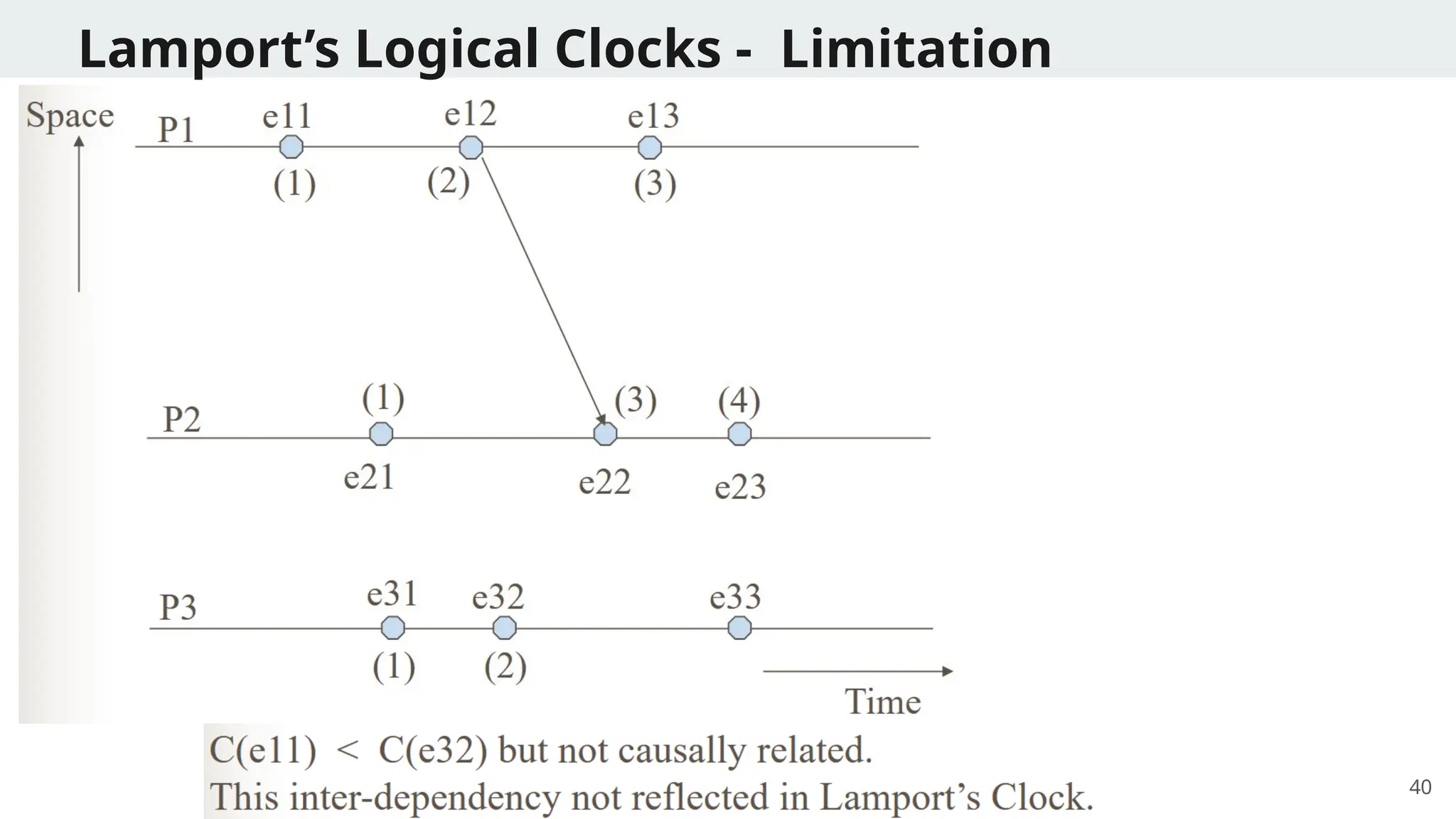
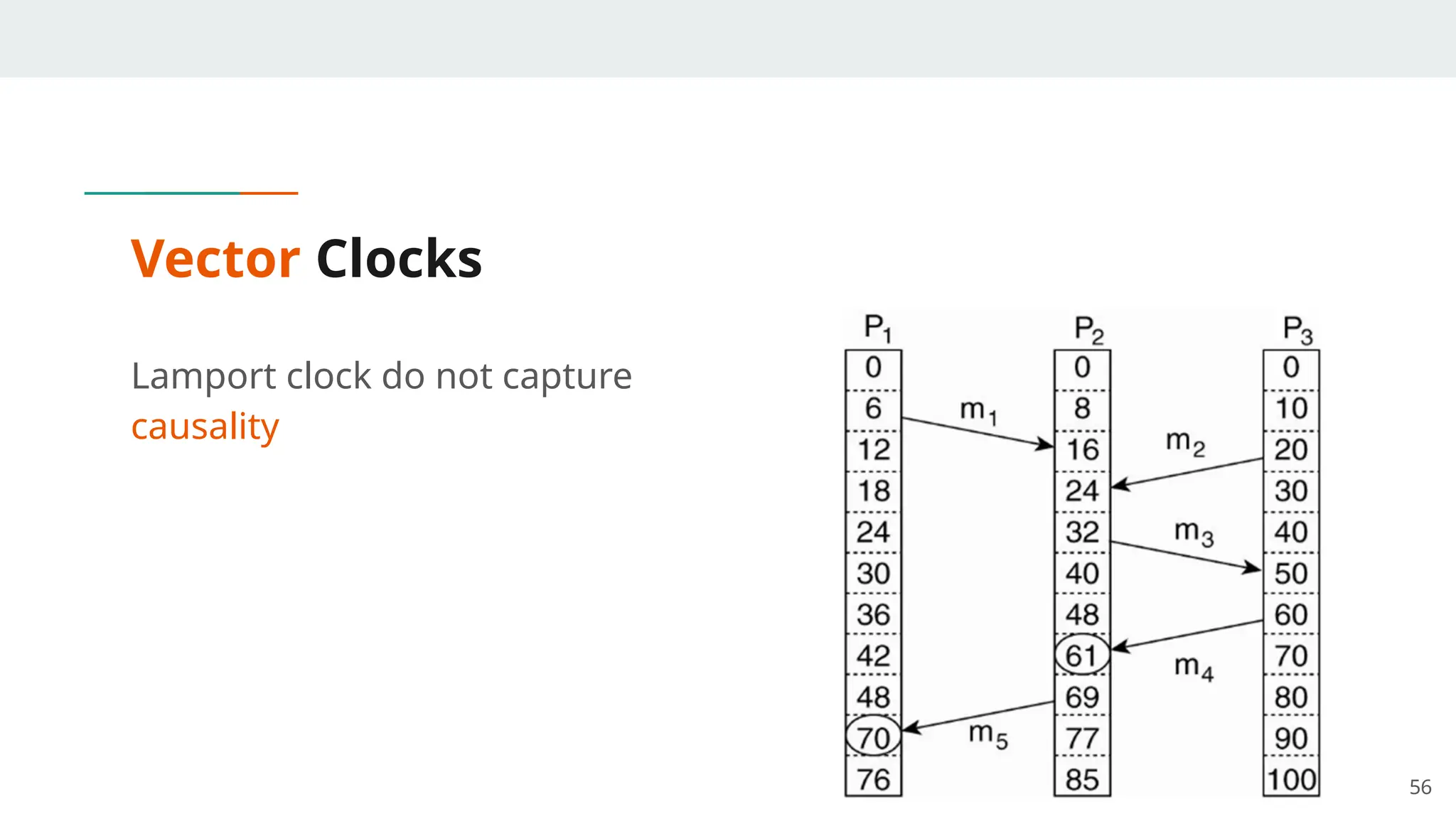
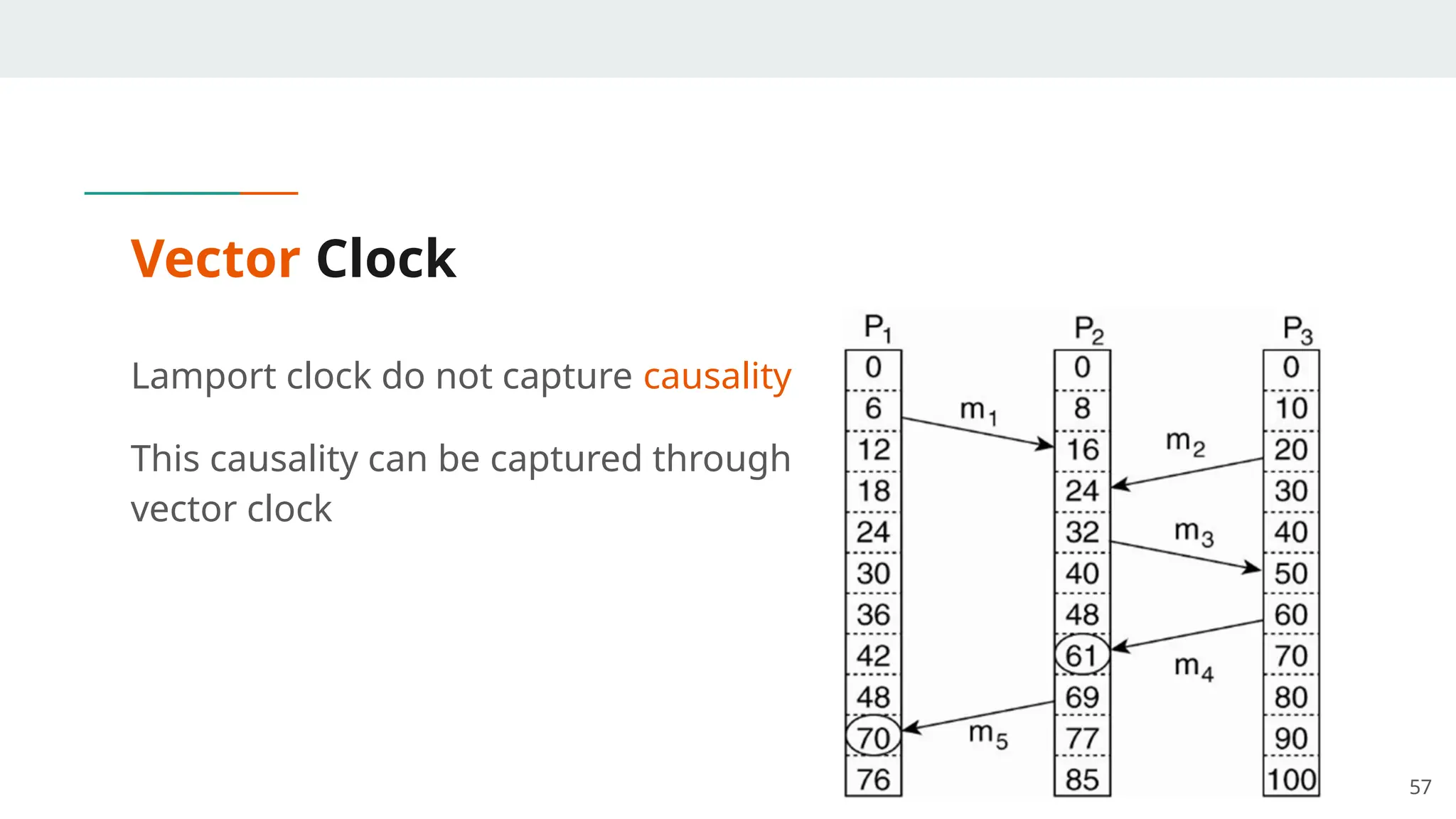
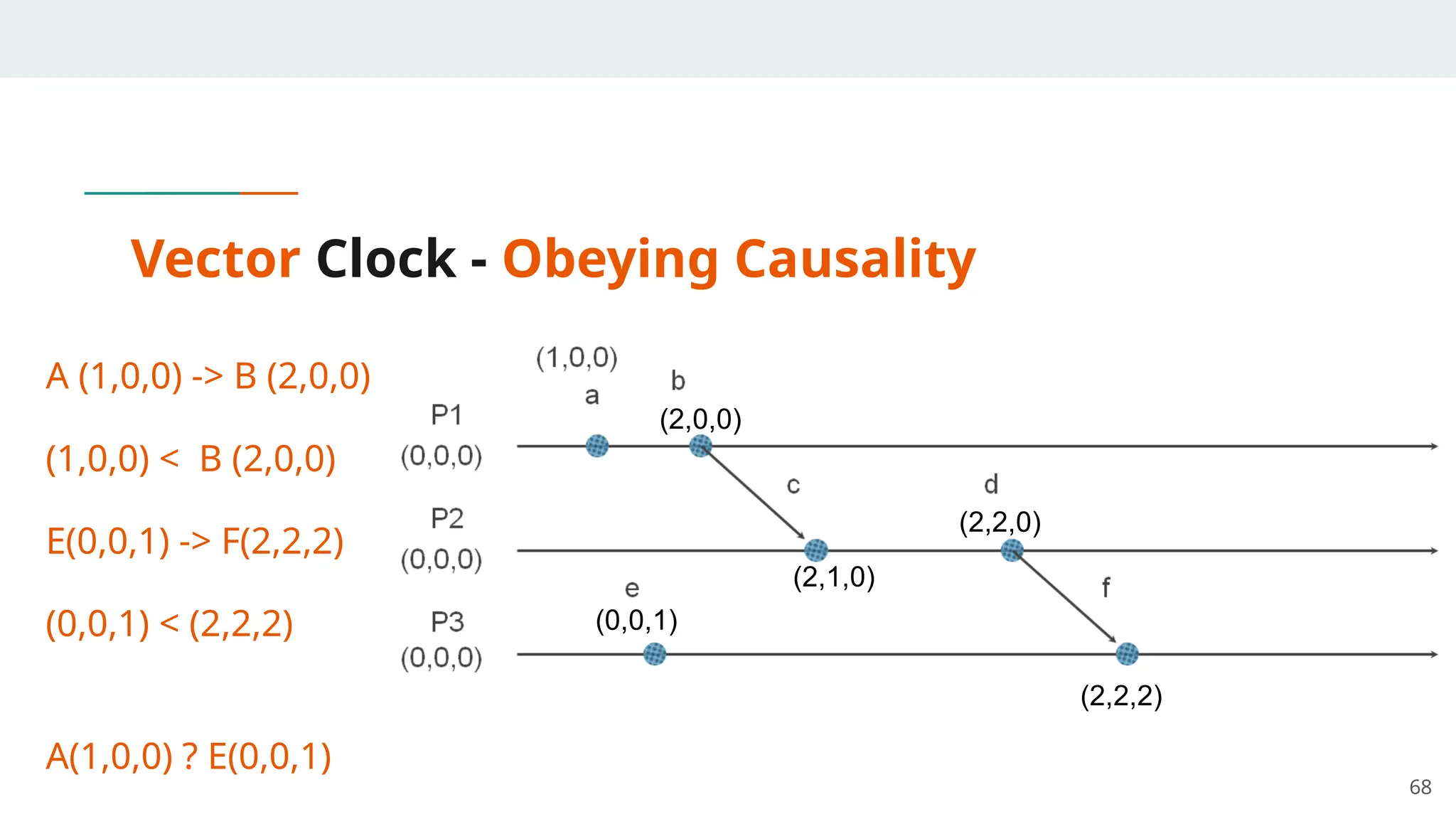
Vector Clock
Lamport clockdo not capture causality
This causality can be captured through
vector clock
57
58.
Vector Clock Concept
❏A vector clock VC(a) assigned to an event a has the property that
if
VC(a) < VC(b) for some event b
❏ Then event is known to casually precede event b
58
59.
Vector Clock Construction
Vectorclock is constructed by letting each process Pi maintain a vector VCi with
two properties
1) VCi[i] is number of events that have occurred so far at Pi. VCi[i] is logical
clock at Pi
2) VCi[j] = k then Pi knows that k events have occurred at Pj. Pi has a
knowledge of local time at Pj
First property is maintained by incrementing VCi[i] at the occurrence of each
event
59
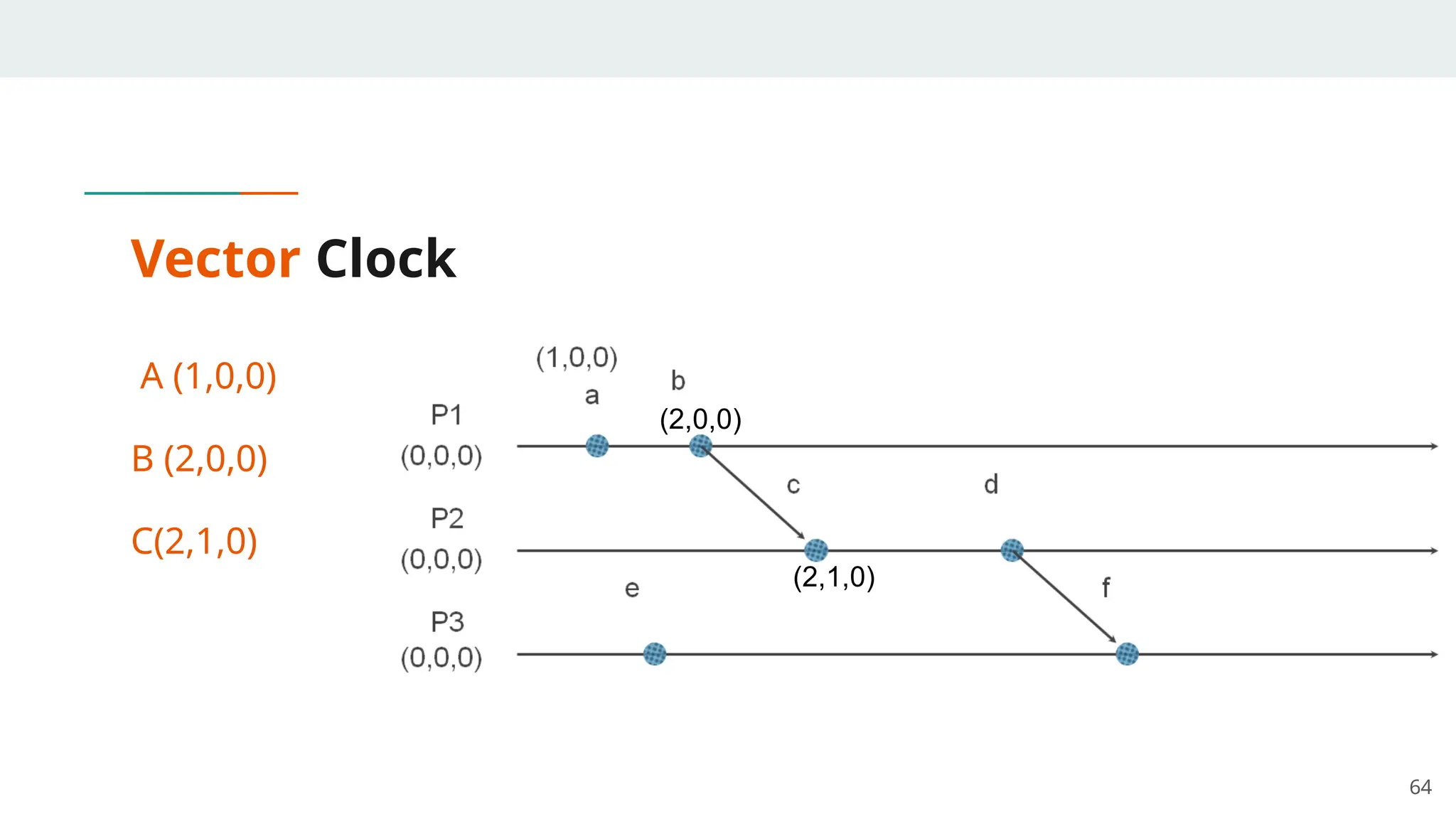
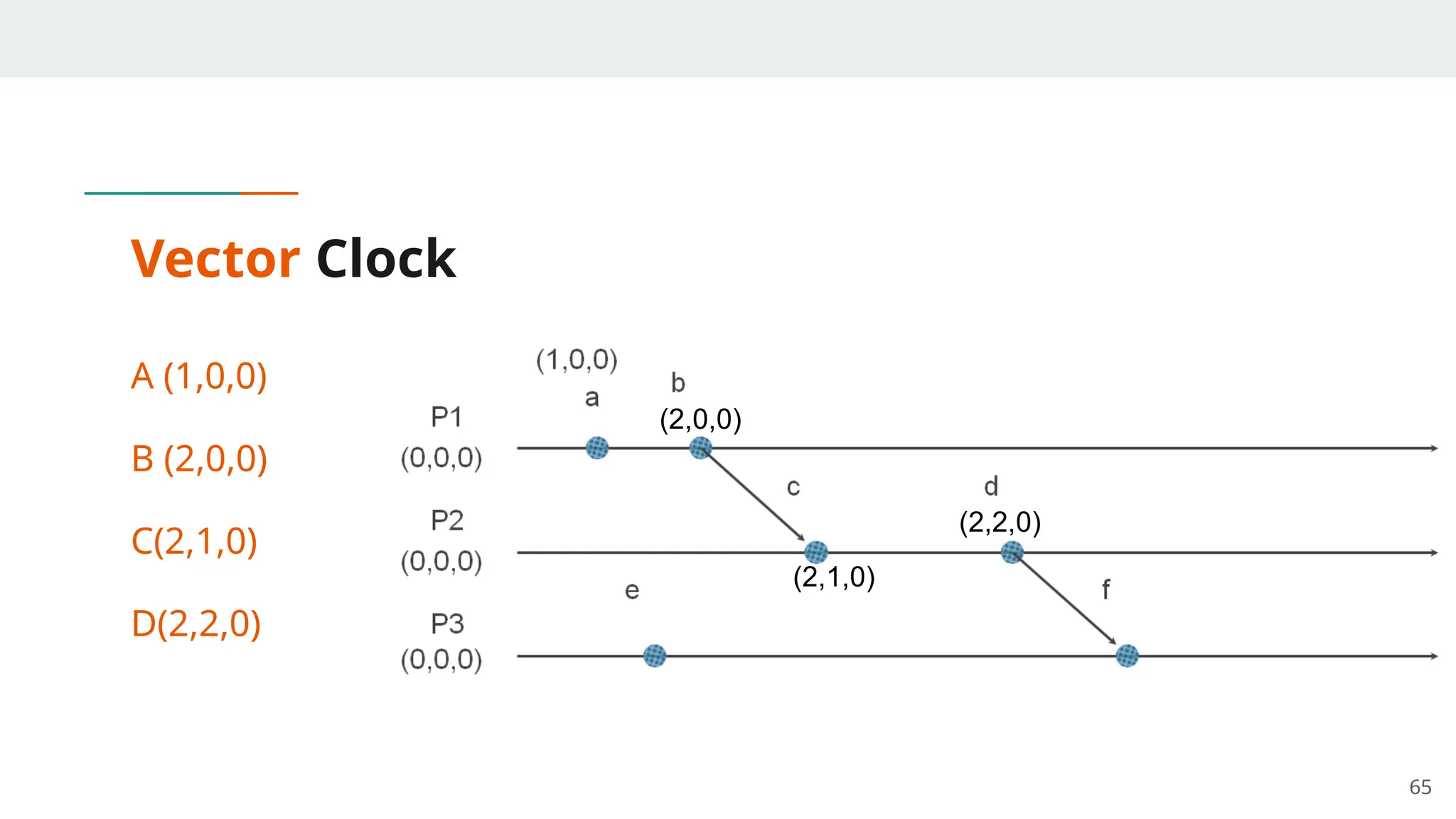
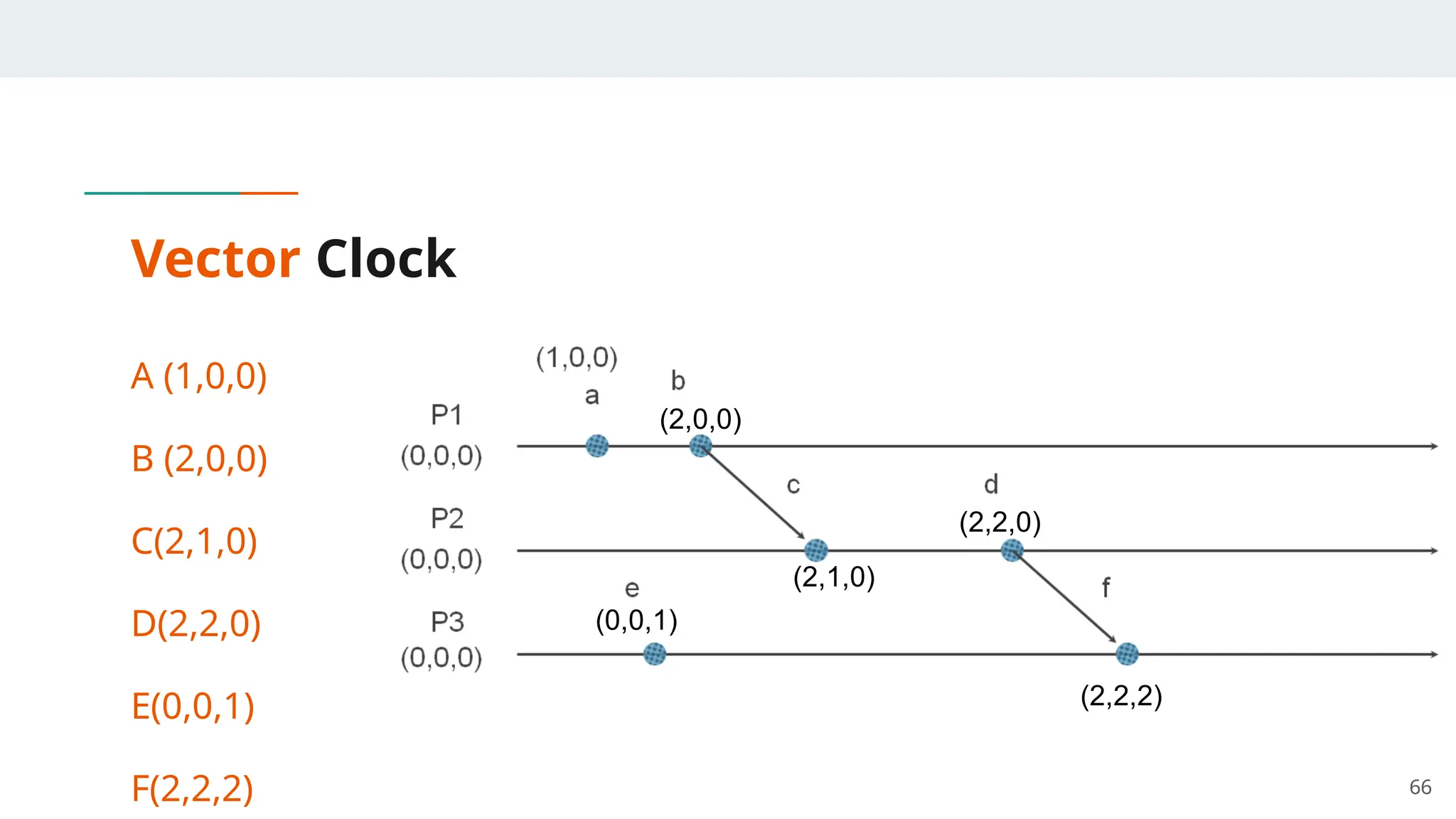
60.
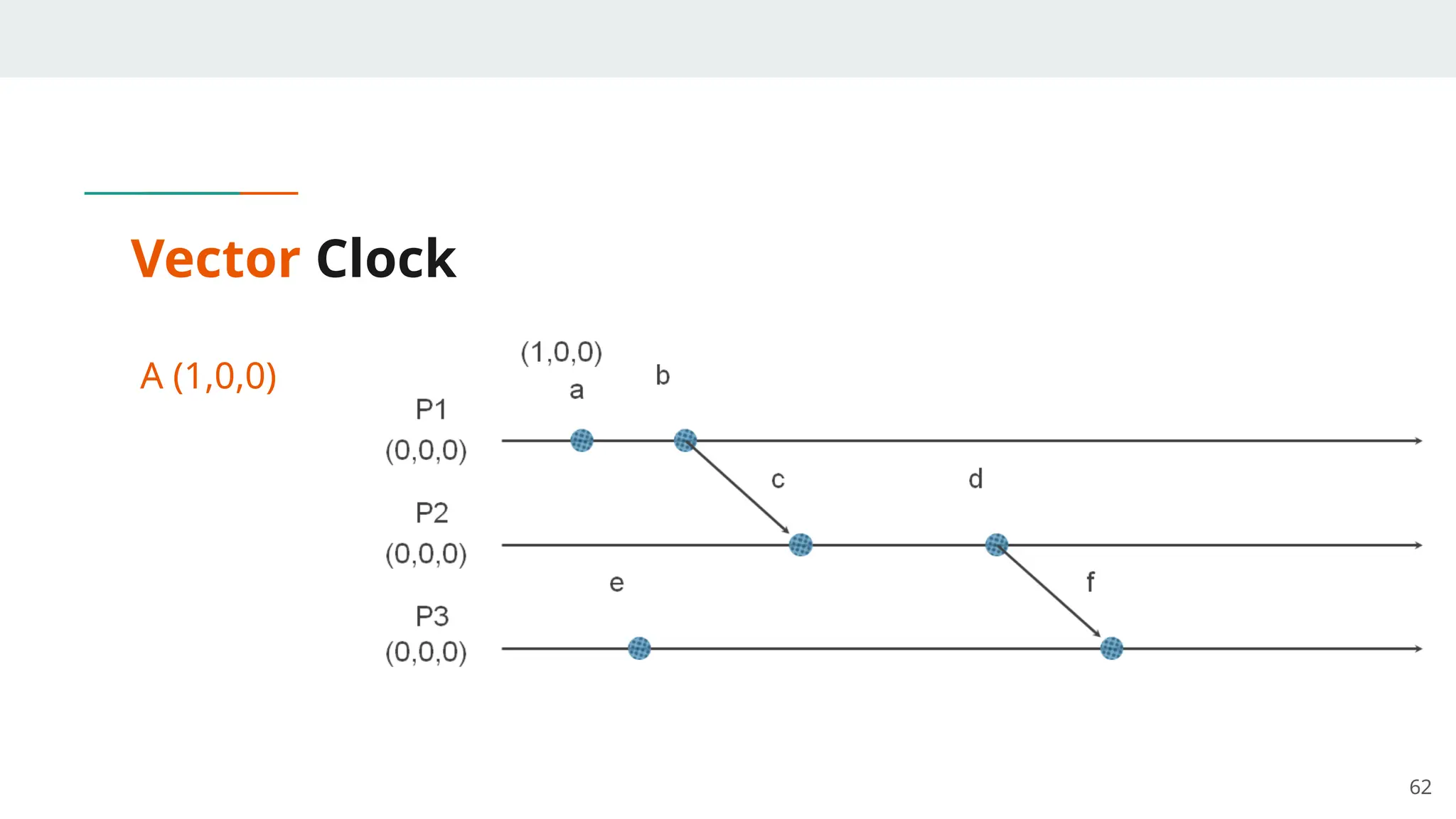
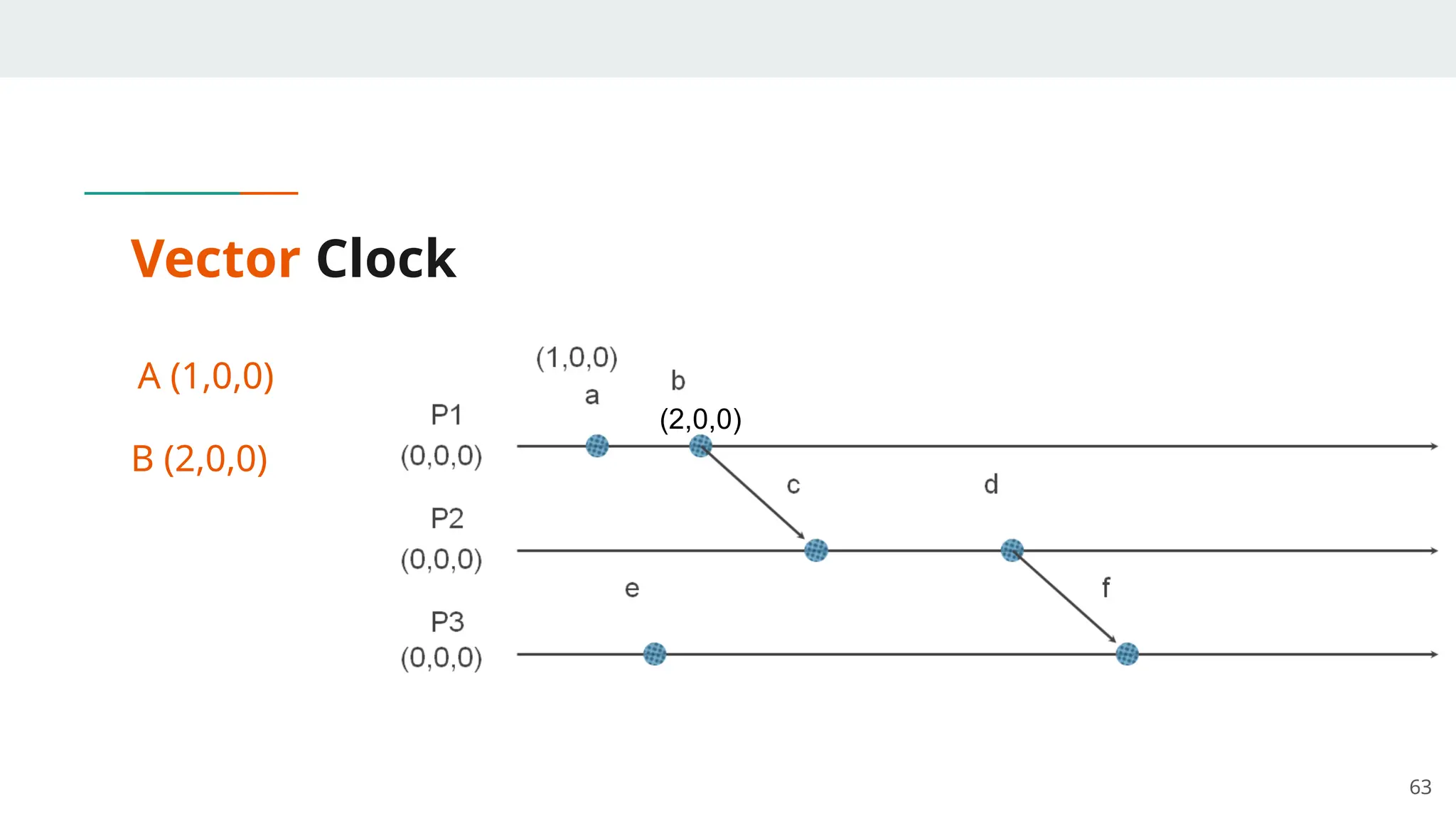
Vector Clock Algorithm
1)Before executing an event Pi executes VCi[i] VCi[i]+1
←
2) When process Pi sends a message m to Pj, it sets m’s vector
timestamp ts(m) equal to VCi after having executed the previous
step
3) Upon receipt of a message m, process Pj adjusts its own vector
by setting VCj[k] max{VCj[k], ts(m)[k]} for each k, after which it
←
executes the first step and delivers the message to the
application
60
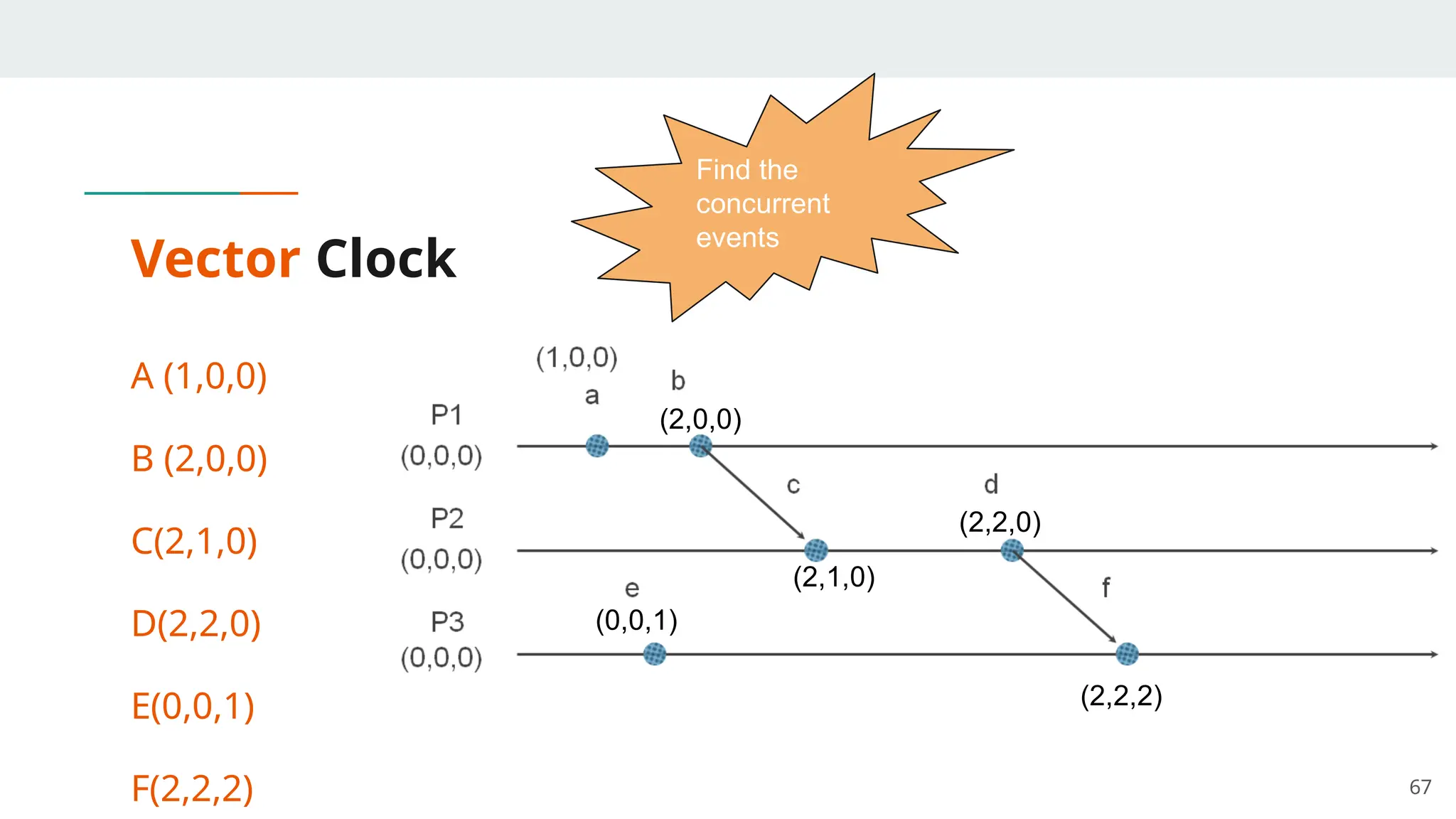
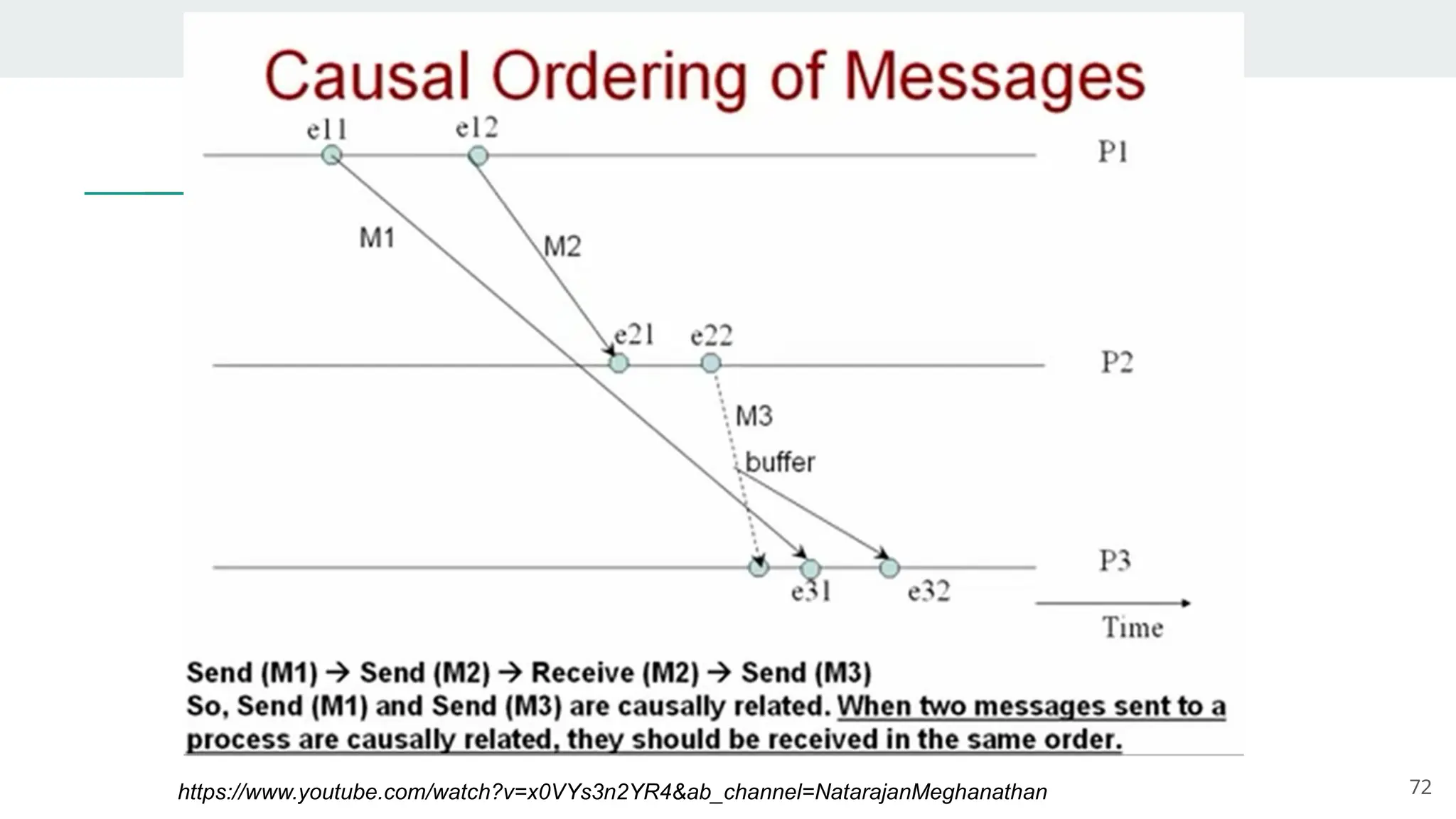
Causality
If a->b thenevent a can affect event b
Concurrency
If neither a->b nor b->a then one event cannot affect the
other
Partial Ordering
Causal events are sequenced
Total Ordering
All events are sequenced 71
Algorithms for Causalordering of Messages
1) BSS- Birman-Schiper Stephenson Algorithm
2) SEC- Schiper-Eggli-Sandoz Algorithm
3) Matrix Algorithm
73
74.
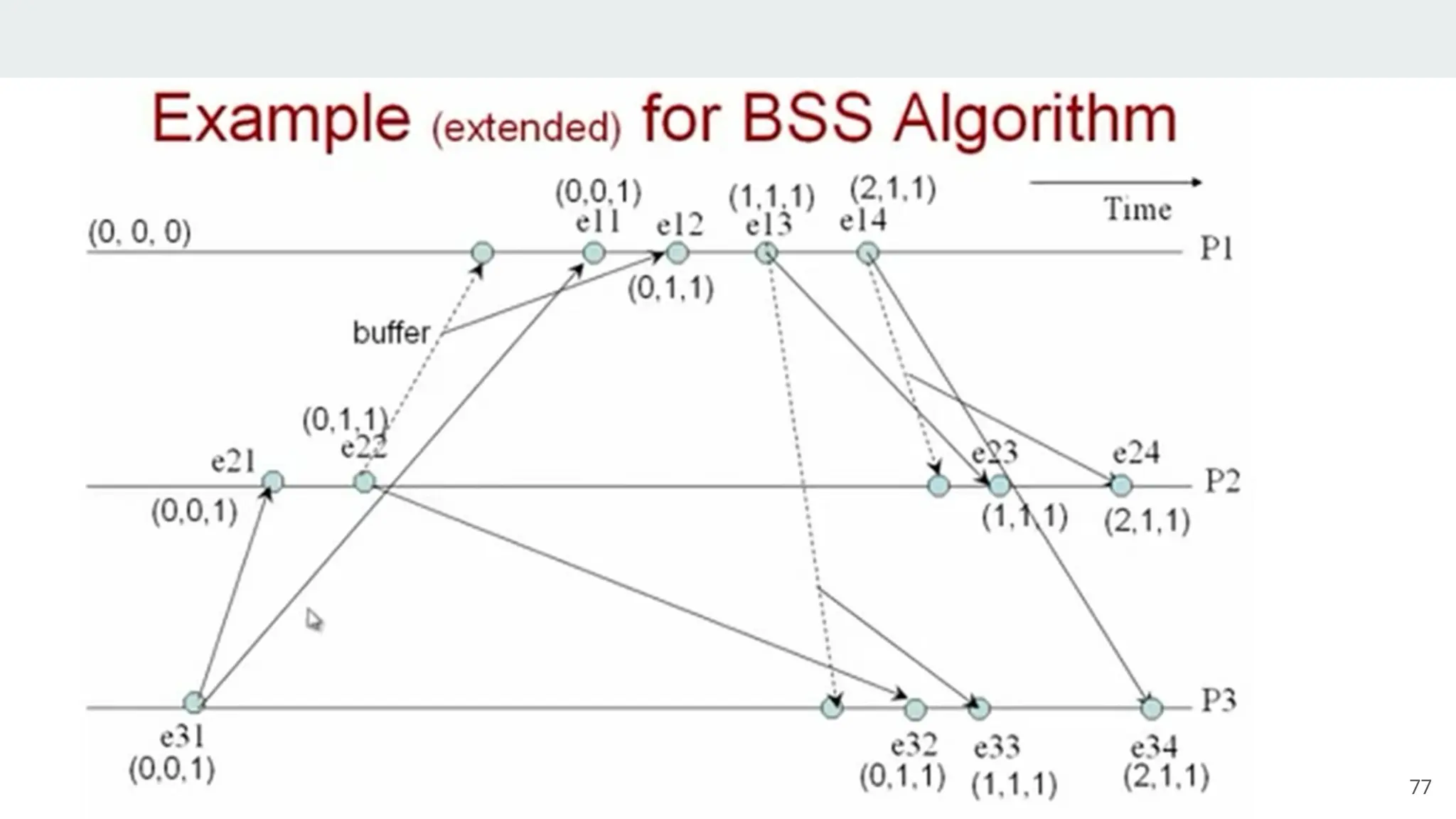
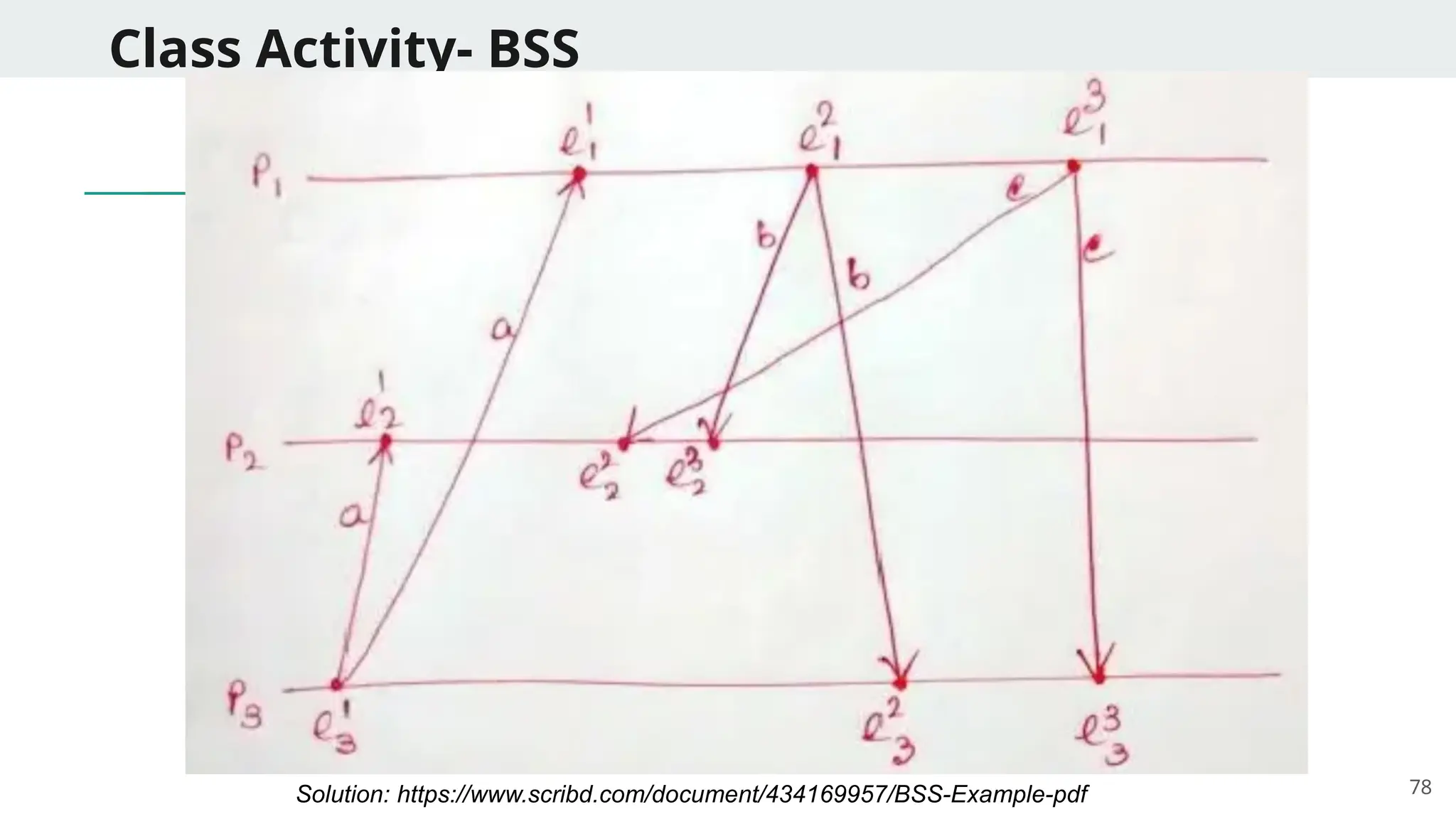
BSS- Birman-Schiper StephensonAlgorithm
❏ Broadcast based: a message sent is received by all other
processes
❏ Deliver a message to a process only if the message preceding it
has been delivered to the process
❏ Otherwise, buffer the message
❏ No clock increment on receiving
❏ Accomplished by using a vector accompanying the message
74
Example: https://www.geeksforgeeks.org/birman-schiper-stephenson-protocol/
75.
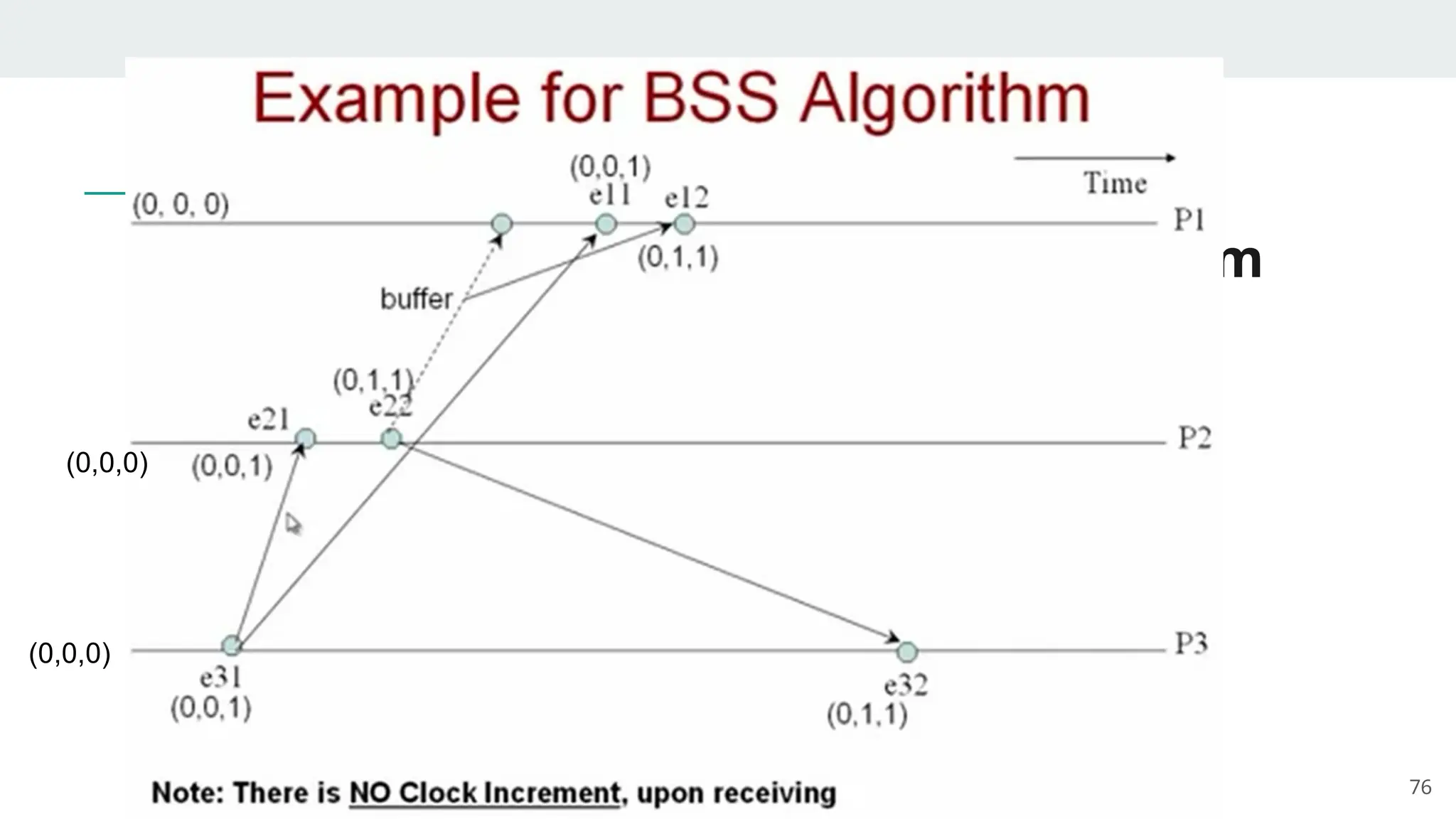
BSS- Birman-Schiper StephensonAlgorithm
1) Process Pi increments the vector time VTpi[i], time stamps and broadcasts the
message m. VTpi[i] - 1 denotes the number of messages preceding m.
2) Pj != Pi receives m. m is delivered when:
a. VTpj[i] == VTm[i] - 1
b. VTpj[k] >= VTm[k] for all k in {1,2,..n} - {i}, n is the total number of processes.
Delayed message are queued in a sorted manner.
c. Concurrent messages are ordered by time of receipt.
3) When m is delivered at Pj, VTpj updated according Rule 2 of vector clocks
3(a) : Pj has received all Pi’s messages preceding m
3(b): Pj has received all other messages received by Pi before sending m
75
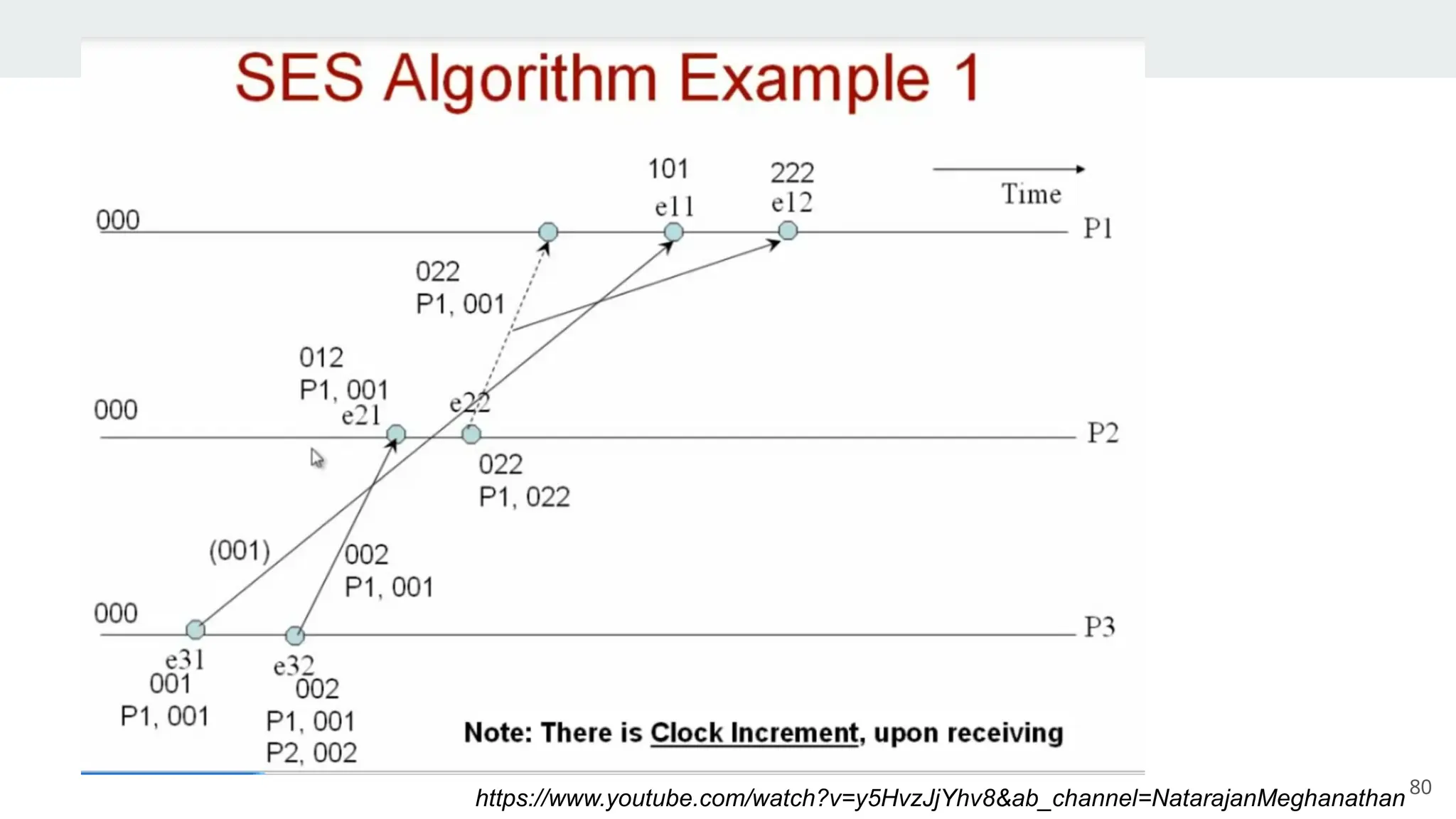
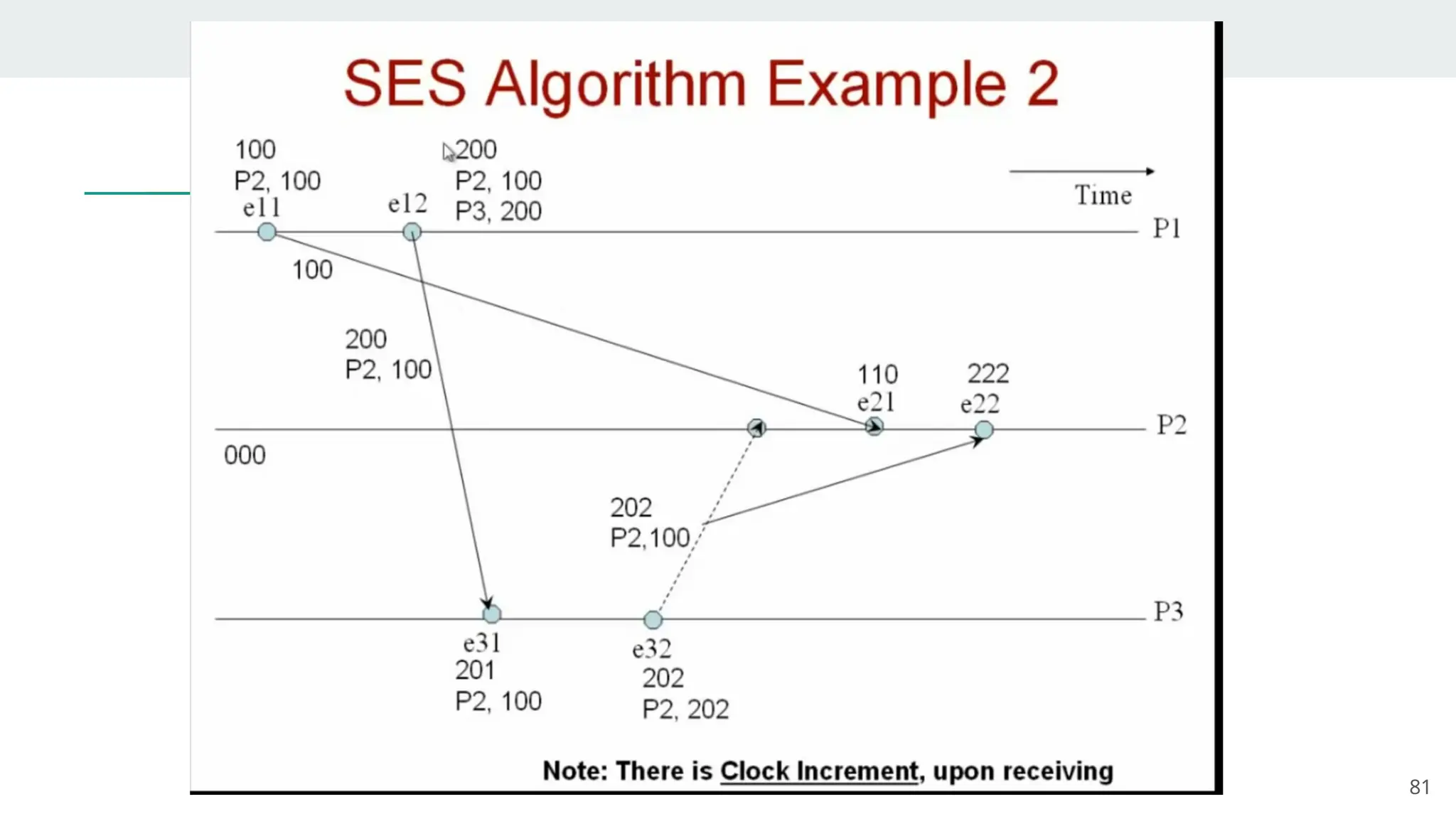
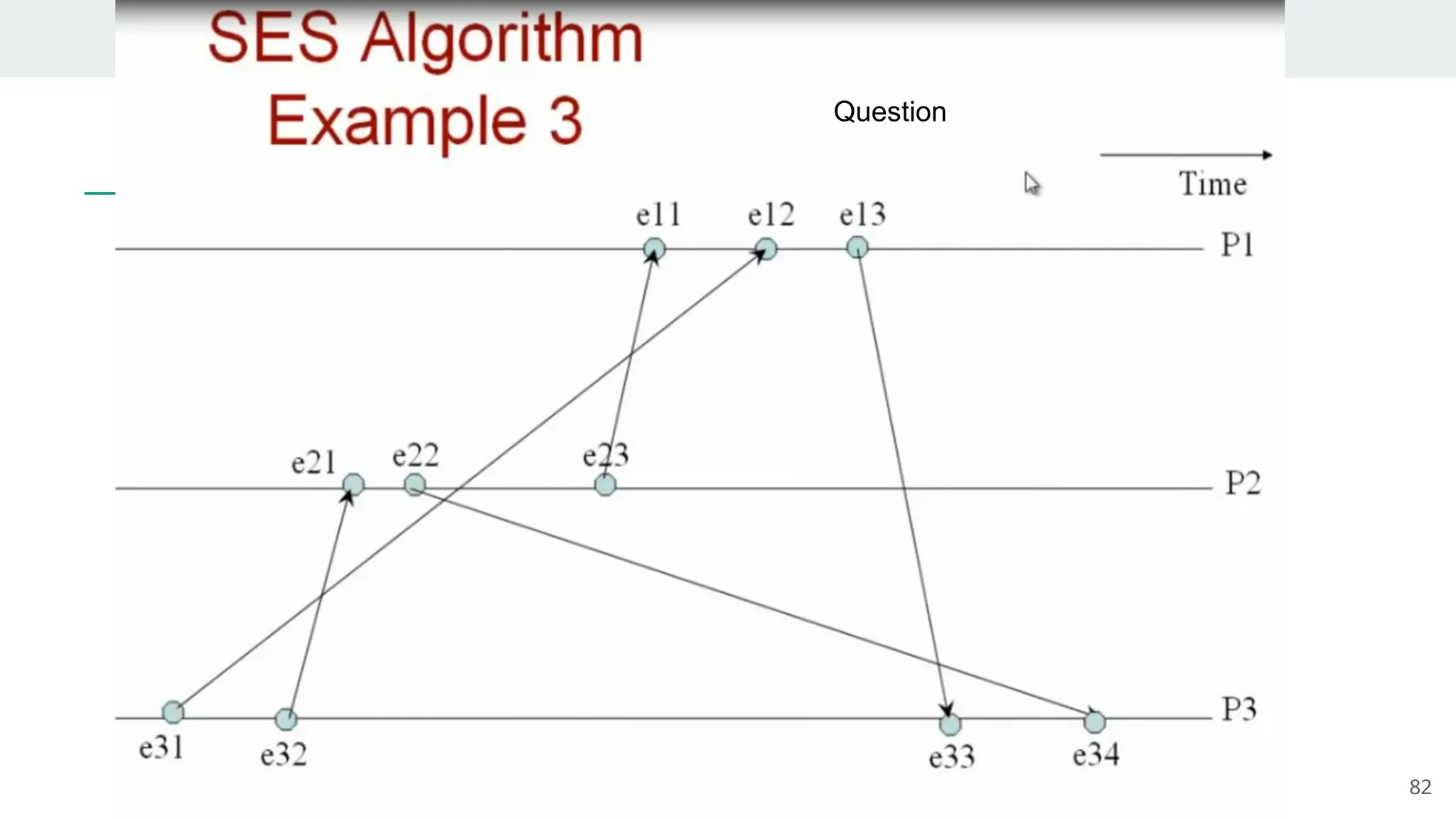
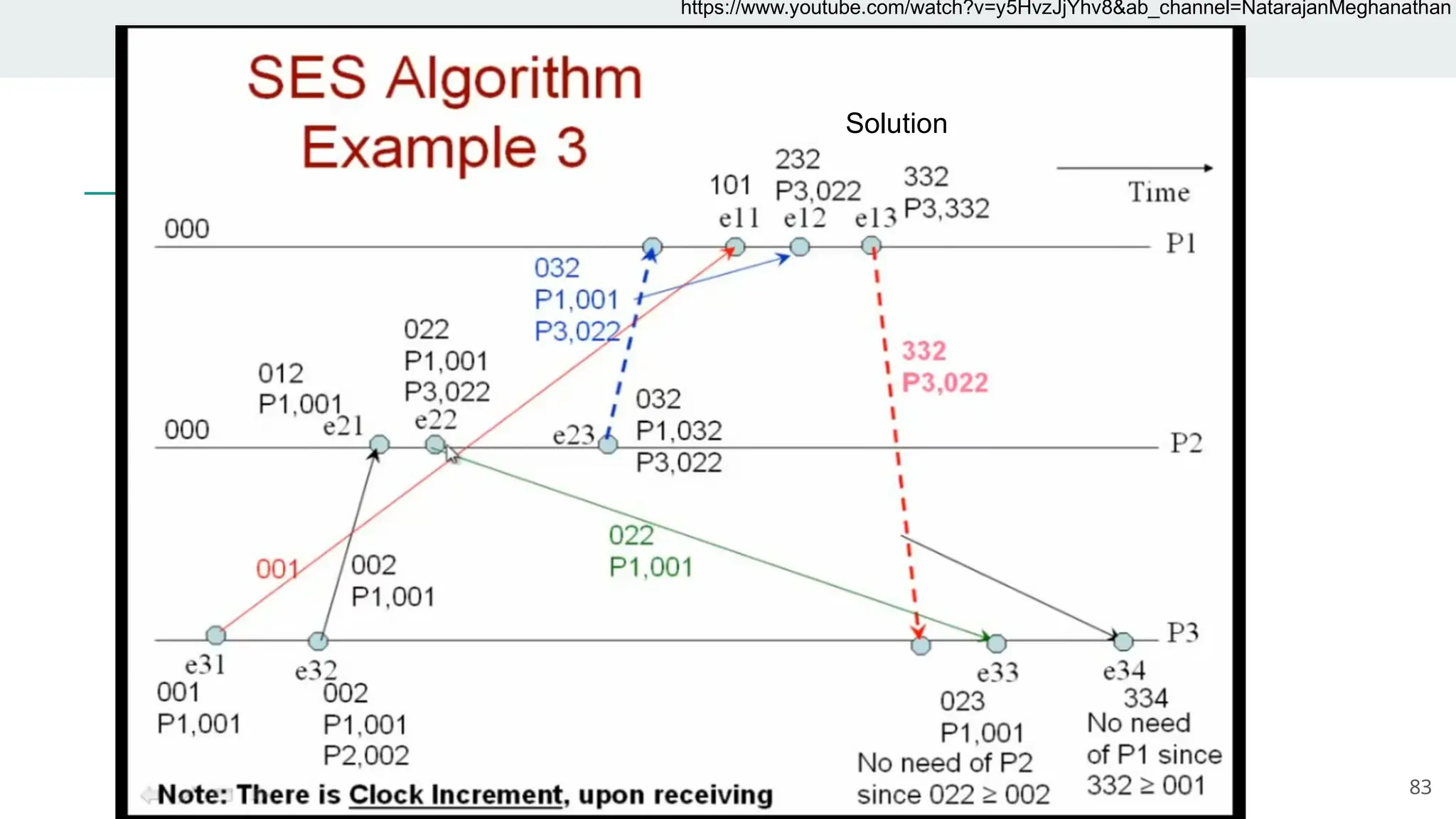
SES- Schiper-Eggli-Sandoz Algorithm
❏No need to broadcast - only used unicast
❏ Few messages
❏ Large-size of messages
❏ Lot of state-information
❏ Clock increment on receiving
79
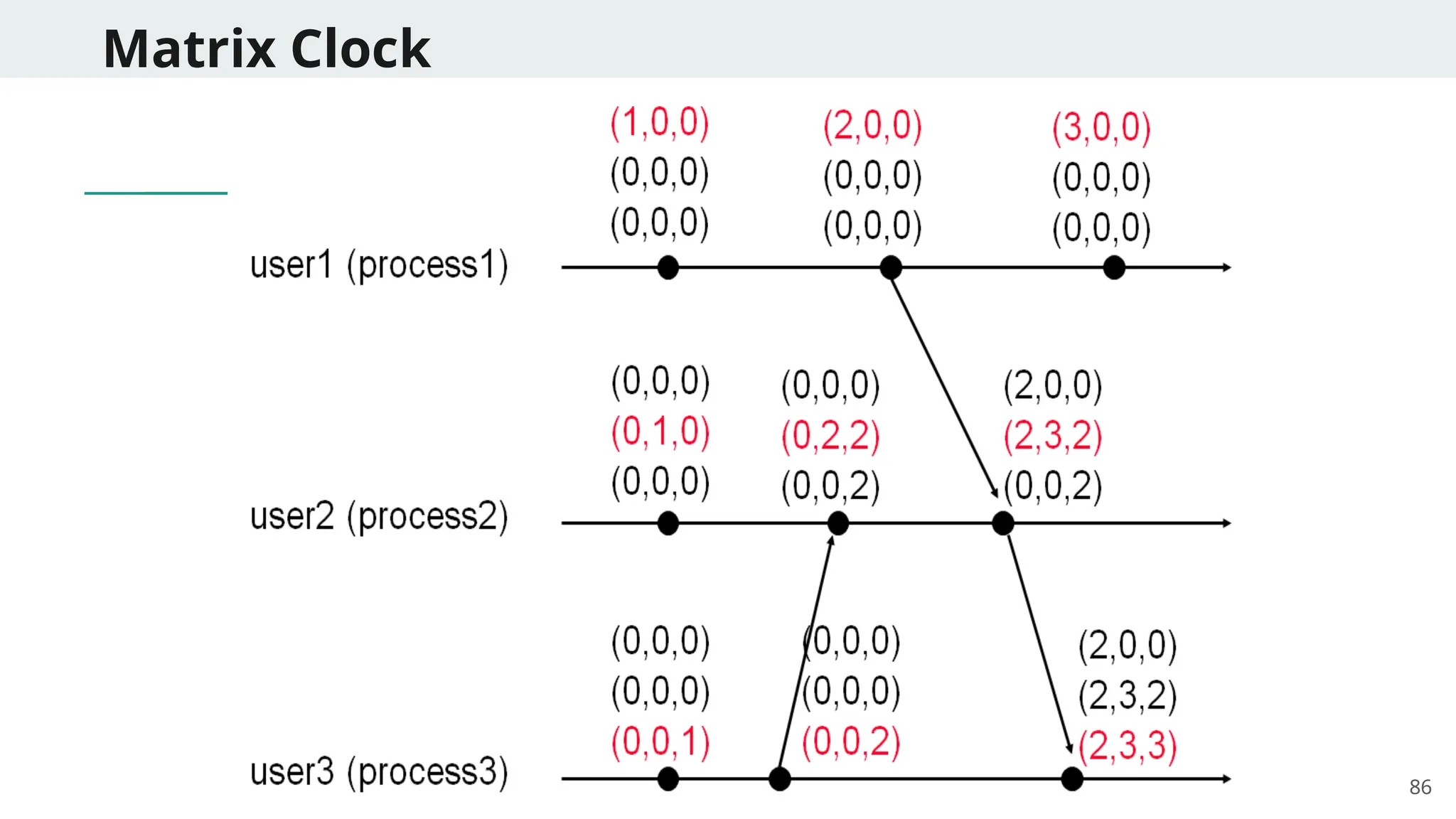
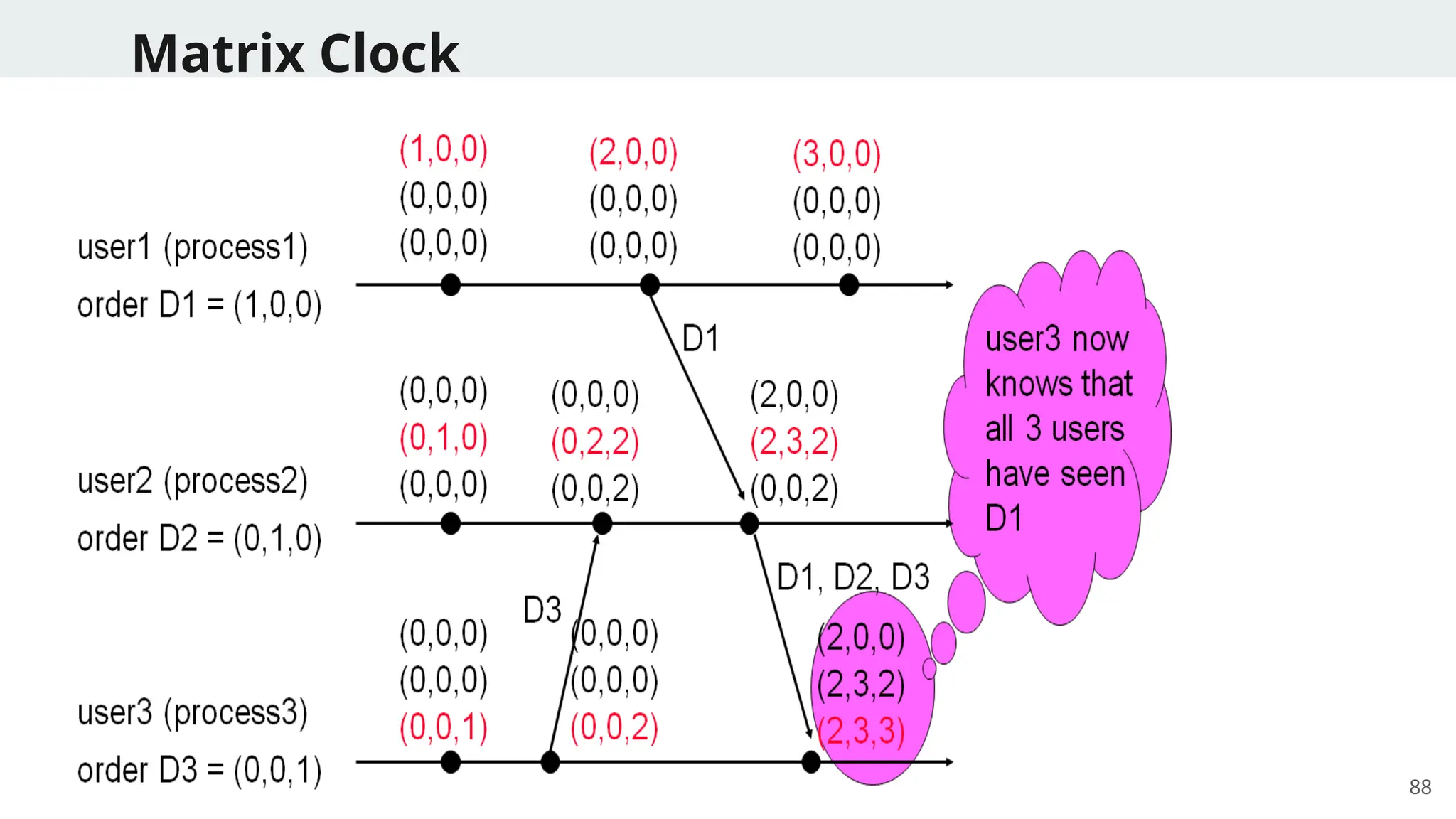
Matrix Clock
❏ Motivation
❏My vector clock describe what I “see”
❏ In some applications, I also want to know what other people
see
❏ Matrix clock
❏ Each event has n vector clocks, one for each process
❏ The i th vector on process i is called process i ’s principle vector
❏ Principle vector is the same as vector clock before
❏ Non-principle vectors are just piggybacked on messages to 84
85.
Matrix Clock
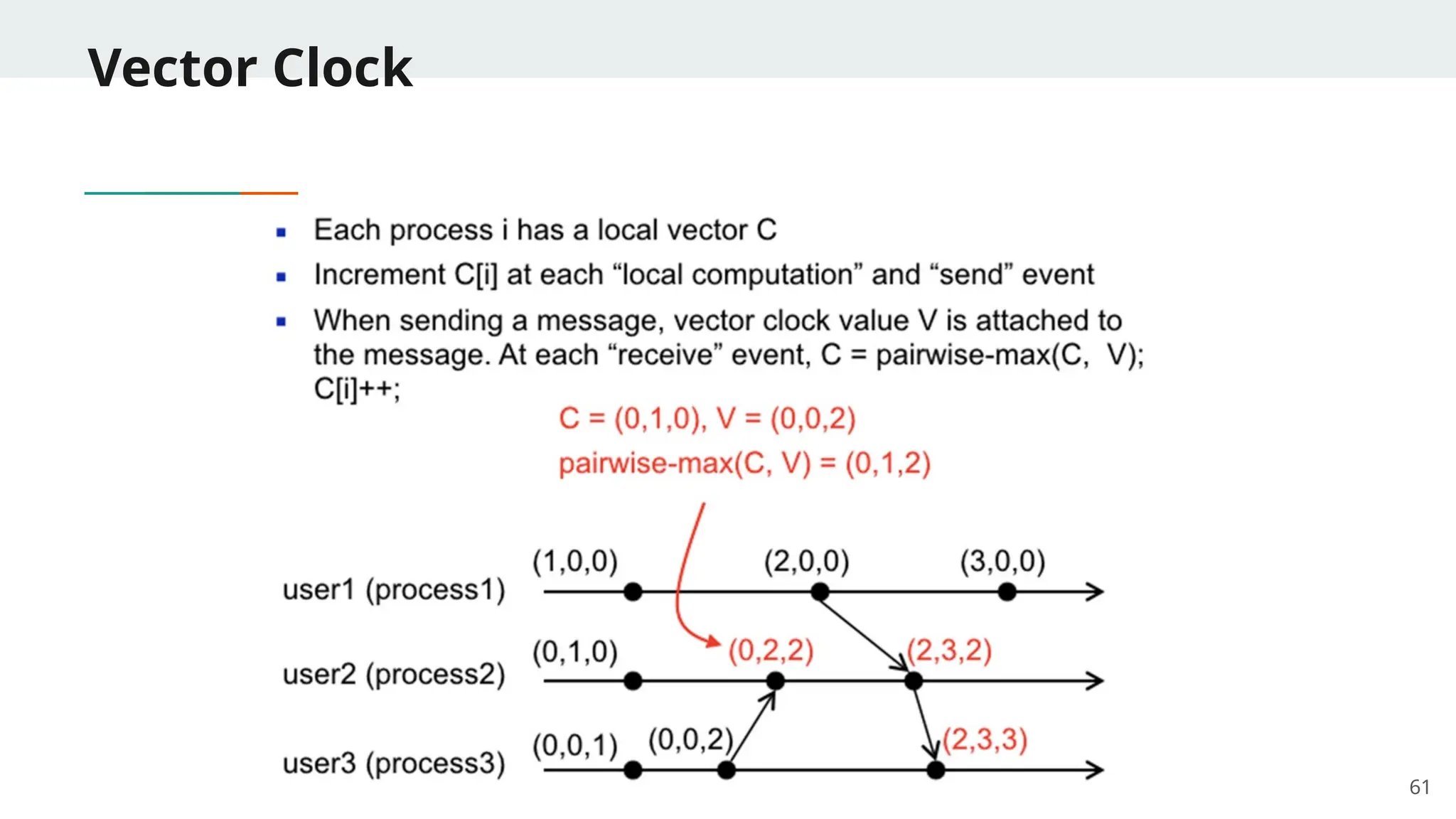
❏ Forprinciple vector C on process i
❏ Increment C[i] at each “local computation” and “send” event
❏ When sending a message, all n vectors are attached to the
message
❏ At each “receive” event, let V be the principle vector of the sender,
❏ C = pairwise-max(C, V); C[i]++;
❏ For non-principle vector C on process i, suppose it corresponds to
process j
❏ At each “receive” event, let V be the vector corresponding to 85
#12 In practise when a system has n computers all n crystals will run at slightly different rates causing clock gradually to get out of sync and give different values when read out. This difference in time value is called CLOCK SKEW
WWV receiver receives time through
Clock skew - difference between the readings of two clocks
Clock drift - difference in clock frequency with reference clock
![Cristian’s Protocol - Network Time Protocol
❏ In NTP, B will also probe A for its current time
❏ The offset is computed as given above
❏ The delay estimation is calculated as
❏ delay = [(T2 - T1) + (T4 - T3) ]/2
❏ Eight pair of values are buffered (offset, delay)
❏ Finally taking the minimum value as the best estimation
17](https://image.slidesharecdn.com/w03-l06physialandlogicalclocks3-250407165917-6bf3ee39/75/W03-L06-Physial-and-Logical-Clocks-3-pptx-17-2048.jpg)



![Vector Clock Construction
Vector clock is constructed by letting each process Pi maintain a vector VCi with
two properties
1) VCi[i] is number of events that have occurred so far at Pi. VCi[i] is logical
clock at Pi
2) VCi[j] = k then Pi knows that k events have occurred at Pj. Pi has a
knowledge of local time at Pj
First property is maintained by incrementing VCi[i] at the occurrence of each
event
59](https://image.slidesharecdn.com/w03-l06physialandlogicalclocks3-250407165917-6bf3ee39/75/W03-L06-Physial-and-Logical-Clocks-3-pptx-59-2048.jpg)
![Vector Clock Algorithm
1) Before executing an event Pi executes VCi[i] VCi[i]+1
←
2) When process Pi sends a message m to Pj, it sets m’s vector
timestamp ts(m) equal to VCi after having executed the previous
step
3) Upon receipt of a message m, process Pj adjusts its own vector
by setting VCj[k] max{VCj[k], ts(m)[k]} for each k, after which it
←
executes the first step and delivers the message to the
application
60](https://image.slidesharecdn.com/w03-l06physialandlogicalclocks3-250407165917-6bf3ee39/75/W03-L06-Physial-and-Logical-Clocks-3-pptx-60-2048.jpg)
![BSS- Birman-Schiper Stephenson Algorithm
1) Process Pi increments the vector time VTpi[i], time stamps and broadcasts the
message m. VTpi[i] - 1 denotes the number of messages preceding m.
2) Pj != Pi receives m. m is delivered when:
a. VTpj[i] == VTm[i] - 1
b. VTpj[k] >= VTm[k] for all k in {1,2,..n} - {i}, n is the total number of processes.
Delayed message are queued in a sorted manner.
c. Concurrent messages are ordered by time of receipt.
3) When m is delivered at Pj, VTpj updated according Rule 2 of vector clocks
3(a) : Pj has received all Pi’s messages preceding m
3(b): Pj has received all other messages received by Pi before sending m
75](https://image.slidesharecdn.com/w03-l06physialandlogicalclocks3-250407165917-6bf3ee39/75/W03-L06-Physial-and-Logical-Clocks-3-pptx-75-2048.jpg)

![Matrix Clock
❏ For principle vector C on process i
❏ Increment C[i] at each “local computation” and “send” event
❏ When sending a message, all n vectors are attached to the
message
❏ At each “receive” event, let V be the principle vector of the sender,
❏ C = pairwise-max(C, V); C[i]++;
❏ For non-principle vector C on process i, suppose it corresponds to
process j
❏ At each “receive” event, let V be the vector corresponding to 85](https://image.slidesharecdn.com/w03-l06physialandlogicalclocks3-250407165917-6bf3ee39/75/W03-L06-Physial-and-Logical-Clocks-3-pptx-85-2048.jpg)