The document contains multiple physics problems related to rotation, torque, angular acceleration, and moments of inertia. One problem involves calculating the angular speed of a winch drum that is lifting a 2000 kg block at a constant speed of 8 cm/s. It is determined that:
- The tension in the cable equals 19.6 kN, given by the weight of the block
- The torque exerted on the winch drum by the cable is 5.9 mkN
- The angular speed of the winch drum is 0.27 rad/s
- The power required by the motor is 1.6 kW




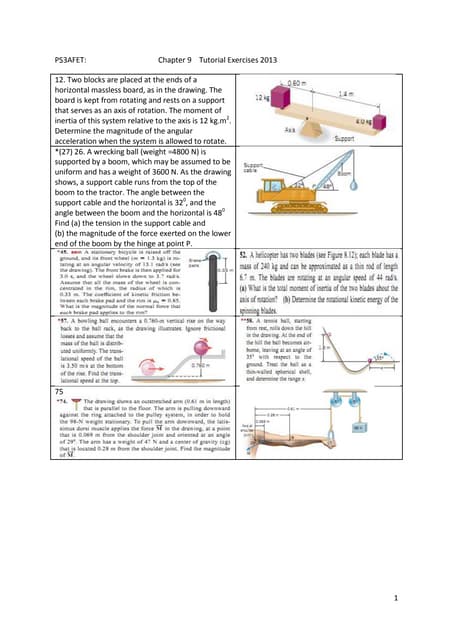
![Rotation 173
Use the definition of the moment of
inertia of a system of four particles
to obtain:
2
44
2
33
2
22
2
11
i
2
ii
rmrmrmrm
rmI
+++=
= ∑
Substitute numerical values and evaluate Iz:
( )( ) ( )( ) ( )( ) ( )( )
2
2222
mkg56
m22kg4.0m2.0kg3.00kg4.0m2.0kg3.0
⋅=
+++=zI
53 ••• [SSM] Use integration to show that the moment of inertia of a thin
spherical shell of radius R and mass m about an axis through its center is 2mR2
/3.
Picture the Problem We can derive the given expression for the moment of
inertia of a spherical shell by following the procedure outlined in the problem
statement.
Find the moment of inertia of a
sphere, with respect to an axis
through a diameter, in Table 9-1:
2
5
2
mRI =
Express the mass of the sphere as a
function of its density and radius:
3
3
4
Rm ρπ=
Substitute for m to obtain: 5
15
8
RI ρπ=
Express the differential of this
expression:
dRRdI 4
3
8
ρπ= (1)
Express the increase in mass dm as
the radius of the sphere increases by
dR:
dRRdm 2
4 ρπ= (2)
Eliminate dR between equations (1)
and (2) to obtain:
dmRdI 2
3
2
=
Integrate over the mass of the
spherical shell to obtain:
2
3
2
shellspherical mRI =](https://image.slidesharecdn.com/ch09ssm-181218172926/85/Ch09-ssm-5-320.jpg)





( )( ) ( )( )
22
222
2
rad/s4.1rad/s37.1
mkg40m0.40kg72m1.2kg36
m/s9.81m0.40kg72m1.2kg36
==
⋅++
−
=α](https://image.slidesharecdn.com/ch09ssm-181218172926/85/Ch09-ssm-10-320.jpg)
![Rotation 179
Substitute numerical values in equation (4) to find T1:
( )[ ( )( )] kN0.29rad/s1.37m1.2m/s9.81kg36 22
1 =−=T
Substitute numerical values in equation (5) to find T2:
( )[ ( )( )] kN50.7rad/s1.37m40.0m/s9.81kg27 22
2 =+=T
81 •• A uniform cylinder of mass m1and radius R is pivoted on frictionless
bearings. A massless string wrapped around the cylinder is connected to a block
of mass m2 that is on a frictionless incline of angle θ, as shown in Figure 9-62.
The system is released from rest with the block a vertical distance h above the
bottom of the incline. (a) What is the acceleration of the block? (b) What is the
tension in the string? (c) What is the speed of the block as it reaches the bottom of
the incline? (d) Evaluate your answers for the special case where θ = 90° and
m1= 0. Are your answers what you would expect for this special case? Explain.
Picture the Problem Let the zero of
gravitational potential energy be at
the bottom of the incline. By
applying Newton’s second law to the
cylinder and the block we can obtain
simultaneous equations in a, T, and
α from which we can express a and
T. By applying the conservation of
energy, we can derive an expression
for the speed of the block when it
reaches the bottom of the incline.
0
x
y
θ
m g
m
2
1
T
T
F
F
R
n
(a) Apply Newton’s second law in
rotational form to the cylinder and in
translational form to the block:
∑ == ατ 00 ITR (1)
and
∑ =−= amTgmFx 22 sinθ (2)
Substitute for α and I0 in equation
(1), solve for T, and substitute in
equation (2) and solve for a to
obtain:
2
1
2
1
sin
m
m
g
a
+
=
θ
(b) Substituting for a in equation (2)
and solve for T yields:
2
1
12
1
2
1
sin
m
m
gm
T
+
=
θ](https://image.slidesharecdn.com/ch09ssm-181218172926/85/Ch09-ssm-11-320.jpg)