Download as PDF, PPTX
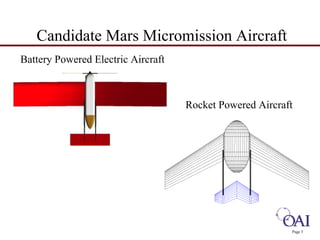
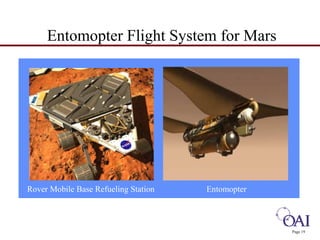
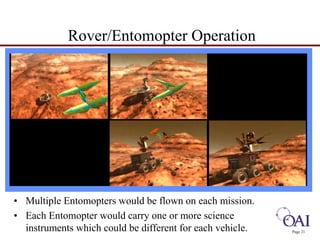
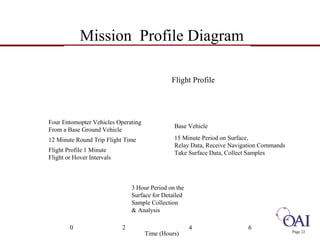
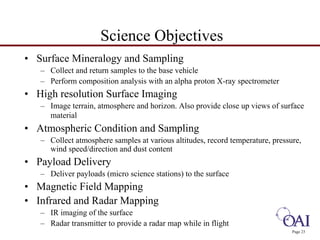



This document proposes using an entomopter, a flying vehicle that generates lift like an insect using flapping wings, for exploration of Mars. An entomopter could expand exploration beyond rovers by enabling aerial reconnaissance, sampling, and imaging across a greater range than current surface vehicles. The low atmospheric density and gravity of Mars may make it an ideal environment for entomopter flight. The document outlines potential mission profiles using entomopters deployed from landers or rovers to conduct science objectives like surface imaging, atmospheric sampling, and payload delivery. Development of entomopters is ongoing through various university and private programs for terrestrial applications.






















































![Wassersug richard[1]](https://cdn.slidesharecdn.com/ss_thumbnails/wassersugrichard1-140914105156-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)











