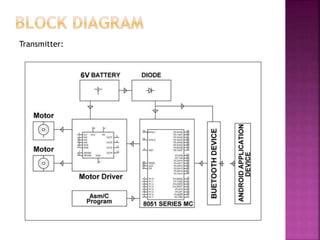
This document describes a robot that is controlled remotely by an Android application using voice commands. It uses a microcontroller and Bluetooth to connect to an Android device. The microcontroller allows inputs and outputs to control motors and sensors. An Android app allows remote control through a GUI. The microcontroller and Bluetooth module allow wireless communication between the robot and Android device for remote robot control.