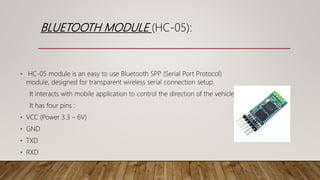
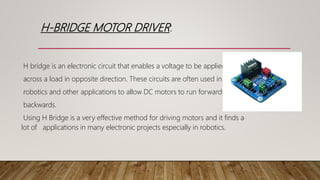
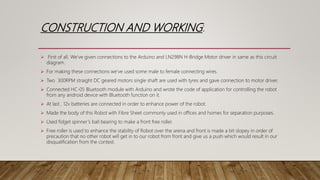
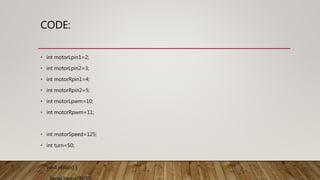
The project involves creating a remote-controlled robot car using Arduino technology and an Android application to provide user inputs via Bluetooth. Key components include an Arduino microcontroller, H-bridge motor driver, and HC-05 Bluetooth module, enabling various functionalities such as forward and backward movement. The project enhances understanding of electronics basics and mobile app development while suggesting potential applications in entertainment and delivery services.