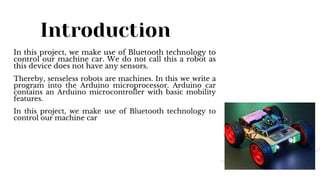
The project outlines the design of a Bluetooth-controlled car using an Arduino microcontroller, emphasizing its control via smart devices like smartphones and tablets. It details necessary tools, key components, advantages such as wireless control and cost-effectiveness, and disadvantages including limited range and security concerns. The document concludes that this prototype can effectively recognize user commands and suggests possible enhancements with additional sensors.