Download as PDF, PPTX


![Distance, Attractiveness and Movement
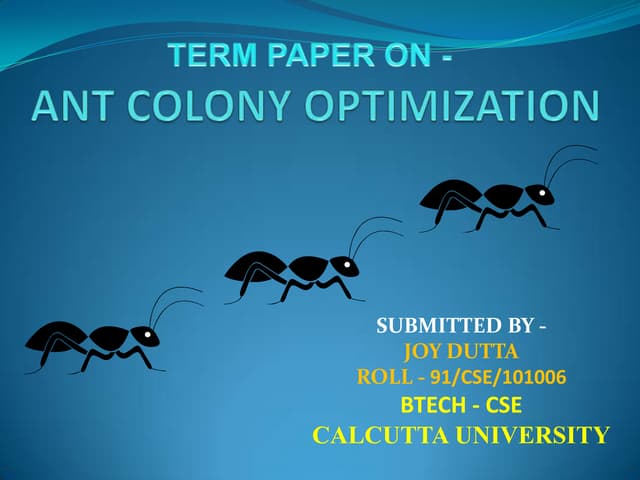
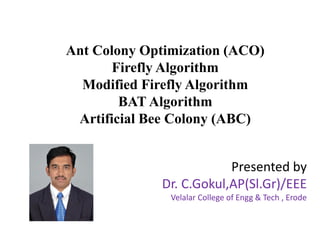
• Distance between i and j fireflies at 𝑥𝑖and 𝑥𝑗
Cartesian distance 𝑟𝑖𝑗 = || 𝑥𝑖 – 𝑥𝑗||
• Attractiveness 𝛽 varies with distance between two fireflies
[𝛽0=1, 𝛾=1]
• Firefly movement
𝑥𝑖 = 𝑥𝑖 + 𝛽 (𝑥𝑗 − 𝑥𝑖) + α(rand-0.5)
For scheduling: Random number (rand)= 0.2, Randomization
parameter (α)=0.3
𝛽 = 𝛽0 𝑒−𝛾𝑟2](https://image.slidesharecdn.com/acoabcfireflymodifiedfireflybat-191214182919/85/ACO-Firefly-Modified-Firefly-BAT-ABC-algorithms-8-320.jpg)
![Yes
No
No
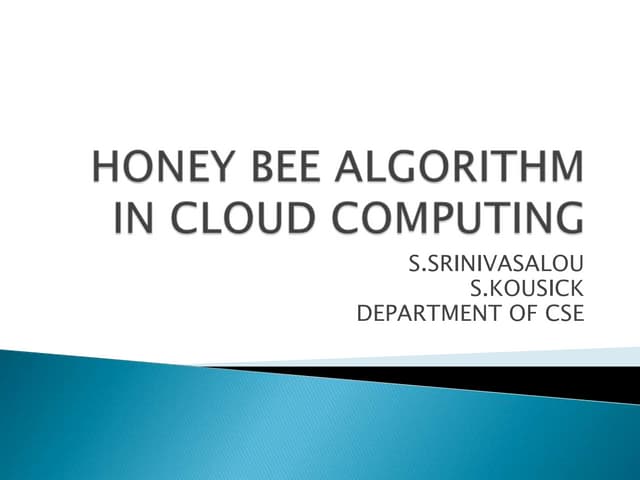
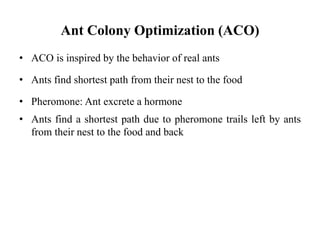
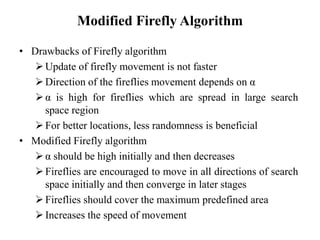
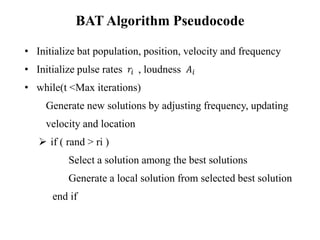
Define absorption coefficient γ
Formulate light intensity I [I=f(x)]
Initialize Fireflies parameters, initial population Xi, where i =1,
2…n
Increment Gen by 1
For i = 1: n
For j = 1: n
f (Xj) > f (Xi)
Move firefly i towards firefly j
Best solution obtained
Terminate Process
Gen >
maxGen
Yes
Evaluate new solutions
Flow chart for Firefly Algorithm](https://image.slidesharecdn.com/acoabcfireflymodifiedfireflybat-191214182919/85/ACO-Firefly-Modified-Firefly-BAT-ABC-algorithms-9-320.jpg)
![Yes
No
No
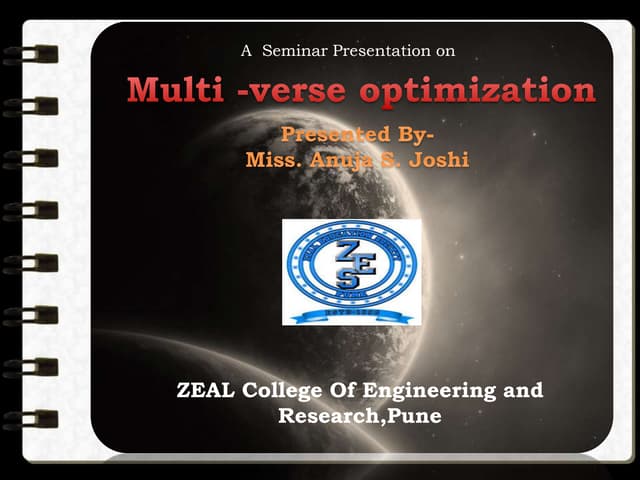
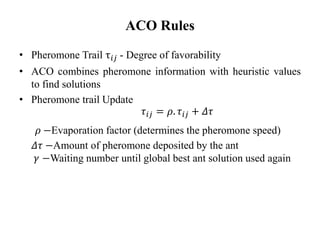
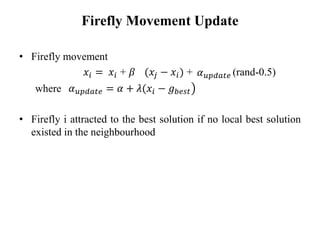
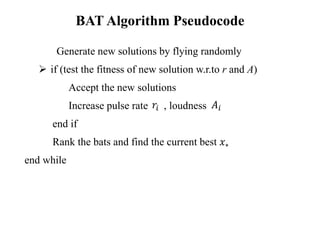
Define absorption coefficient γ
Formulate light intensity I [I=f(x)]
Initialize Fireflies parameters, initial population Xi, where i =1,
2…n
Increment Gen by 1
For i = 1: n
For j = 1: n
f (Xj) > f (Xi)
Best solution obtained
Terminate Process
Gen >
maxGen
Yes
Update Distance, Movement by updating the value of α
Evaluate new solutions
Move firefly i towards firefly j
Flow chart for Modified Firefly Algorithm](https://image.slidesharecdn.com/acoabcfireflymodifiedfireflybat-191214182919/85/ACO-Firefly-Modified-Firefly-BAT-ABC-algorithms-12-320.jpg)
![BAT Algorithm
• BAT Algorithm is based on echo location behaviour of bats
• Bat emit signals (with frequency ‘f’) to locate prey. This
signals bounce back if they hit an object.
• Eco signals are used to calculate the distance
• After hitting and reflecting, the bats transform their own pulse
into useful information to explore how far away the prey is.
• Rate of pulse emission r[0,1]
– 0 means there is no emission
– 1 means Bat emission is maximum](https://image.slidesharecdn.com/acoabcfireflymodifiedfireflybat-191214182919/85/ACO-Firefly-Modified-Firefly-BAT-ABC-algorithms-13-320.jpg)


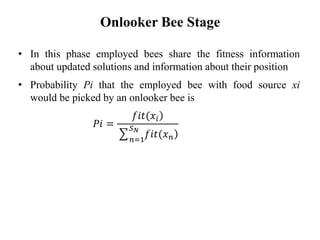
![• Initiates the foraging in the neighborhood
• Employed bee produces new trial food position vi around xi
where 𝑥𝑖 - current food source position,
j ε { 1,2, …., D},
k ε { 1,2, …., SN} are randomly picked indices,
D - Number of search dimensions,
SN - Number of employed bees,
𝜑𝑖𝑗 - Uniform random value from [-1,1]
Employed Bee Stage
൯𝑣𝑖𝑗 = 𝑥𝑖𝑗 + 𝜑𝑖𝑗(𝑥 𝑘𝑗 − 𝑥𝑖𝑗](https://image.slidesharecdn.com/acoabcfireflymodifiedfireflybat-191214182919/85/ACO-Firefly-Modified-Firefly-BAT-ABC-algorithms-20-320.jpg)

This document discusses several metaheuristic optimization algorithms, including Ant Colony Optimization (ACO), Firefly Algorithm, Modified Firefly Algorithm, BAT Algorithm, and Artificial Bee Colony (ABC) algorithm. It provides brief overviews of each algorithm, describing how they are inspired by natural behaviors and processes and outlining their main rules and procedures. The document is presented by Dr. C.Gokul and discusses these algorithms for optimization and problem solving.