Download to read offline
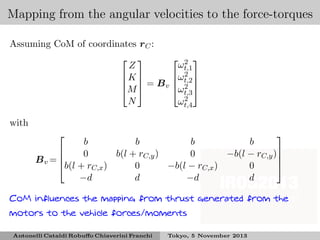
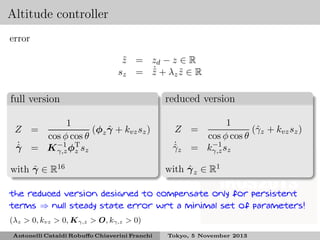
![Experimental results
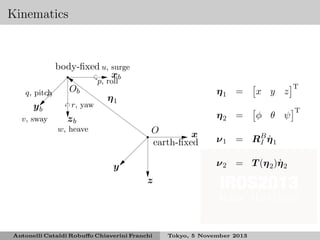
desired trajectory
1
η1,d [m]
0.5
0
−0.5
−1
−1.5
0
20
40
60
80
100
120
140
time [s]
Antonelli Cataldi Robuffo Chiaverini Franchi
Tokyo, 5 November 2013](https://image.slidesharecdn.com/accfriros2013talk-131103070329-phpapp01/85/IROS-2013-talk-17-320.jpg)
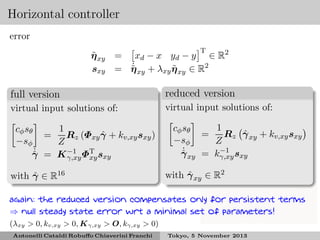
![Experimental results
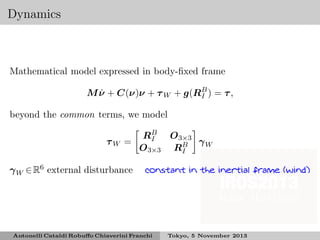
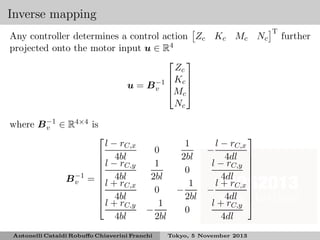
Norm of the 3D position errors for the cases a) (green) and b) (blue)
(no weight)
0.35
η 1,d − η 1 [m]
0.3
0.25
0.2
0.15
0.1
0.05
0
0
20
40
60
80
time [s]
Antonelli Cataldi Robuffo Chiaverini Franchi
100
120
140
Tokyo, 5 November 2013](https://image.slidesharecdn.com/accfriros2013talk-131103070329-phpapp01/85/IROS-2013-talk-18-320.jpg)
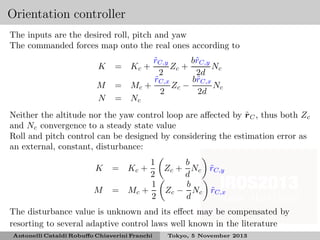
![Experimental results
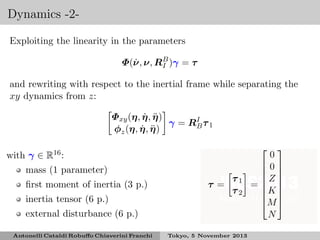
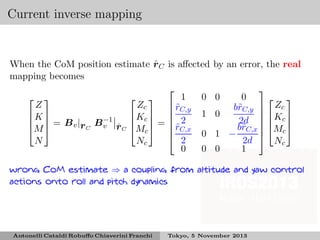
Norm of the 3D position errors for the cases c) (green) and d) (blue)
(weight)
0.35
η 1,d − η 1 [m]
0.3
0.25
0.2
0.15
0.1
0.05
0
0
20
40
60
80
time [s]
Antonelli Cataldi Robuffo Chiaverini Franchi
100
120
140
Tokyo, 5 November 2013](https://image.slidesharecdn.com/accfriros2013talk-131103070329-phpapp01/85/IROS-2013-talk-19-320.jpg)
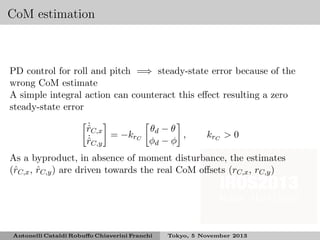
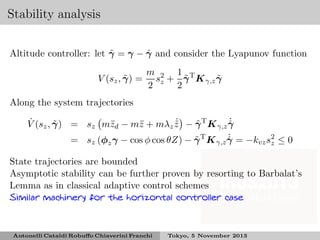
![Experimental results
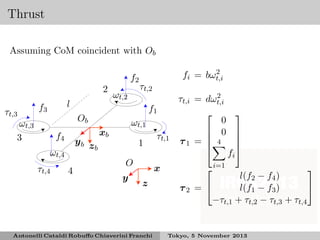
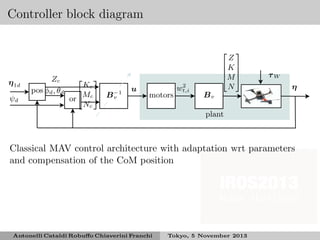
Roll (top) and pitch (bottom) angles for cases c) (green) and d) (blue)
ϕ [deg]
2
0
−2
−4
0
20
40
20
40
60
80
100
120
140
60
80
100
120
140
time [s]
θ [deg]
10
5
0
−5
0
time [s]
Antonelli Cataldi Robuffo Chiaverini Franchi
Tokyo, 5 November 2013](https://image.slidesharecdn.com/accfriros2013talk-131103070329-phpapp01/85/IROS-2013-talk-20-320.jpg)
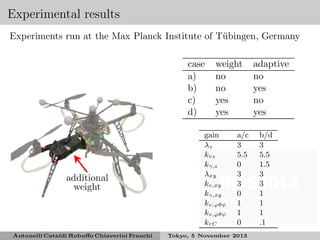
![Experimental results
N [Nm] M [Nm] K [Nm]
Z [N]
Control forces for the cases c) (green) and d) (blue)
−14
−16
0
20
40
60
80
100
120
140
0
0
20
40
60
80
100
120
140
0.2
0
−0.2
−0.4
0
20
40
60
80
100
120
140
0.01
0
−0.01
−0.02
−0.03
0
20
40
60
80
100
120
140
time [s]
0.5
Antonelli Cataldi Robuffo Chiaverini Franchi
time [s]
time [s]
time [s]
Tokyo, 5 November 2013](https://image.slidesharecdn.com/accfriros2013talk-131103070329-phpapp01/85/IROS-2013-talk-21-320.jpg)
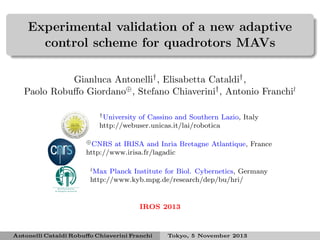
![Experimental results
ˆ
r C [m]
ˆ
γ xy [N]
γz [N]
ˆ
Time history of the parameters estimates for the case d). Top:
parameter γz , center: parameter γ xy , bottom: parameter r C .
−14
−16
−18
0
20
40
20
40
20
40
60
80
100
120
140
60
80
100
120
140
60
80
100
120
140
time [s]
1
0
−1
0
time [s]
0.05
0
−0.05
0
Antonelli Cataldi Robuffo Chiaverini Franchi
time [s]
Tokyo, 5 November 2013](https://image.slidesharecdn.com/accfriros2013talk-131103070329-phpapp01/85/IROS-2013-talk-22-320.jpg)

The document presents an experimental validation of an adaptive control scheme for quadrotor MAVs that is robust to uncertainties in mass, center of mass location, and external disturbances. The control scheme uses adaptive techniques to estimate unknown parameters and compensate for their effects. Experimental results show that the adaptive controller more accurately tracks a desired trajectory than a non-adaptive controller, especially when an additional weight is added to introduce parameter uncertainties. The adaptive controller maintains tracking accuracy even in the presence of external disturbances and unknown variations in vehicle parameters.



![射頻電子 - [第二章] 傳輸線理論](https://cdn.slidesharecdn.com/ss_thumbnails/ch2-150613065059-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
![射頻電子 - [實驗第一章] 基頻放大器設計](https://cdn.slidesharecdn.com/ss_thumbnails/e1-150613065108-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)
![Circuit Network Analysis - [Chapter1] Basic Circuit Laws](https://cdn.slidesharecdn.com/ss_thumbnails/ch1-150613063856-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)




![電路學 - [第五章] 一階RC/RL電路](https://cdn.slidesharecdn.com/ss_thumbnails/circuitch5-150613063008-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)





![電路學 - [第三章] 網路定理](https://cdn.slidesharecdn.com/ss_thumbnails/circuitch3-150613063007-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)



![射頻電子 - [第四章] 散射參數網路](https://cdn.slidesharecdn.com/ss_thumbnails/ch4-150613065103-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)