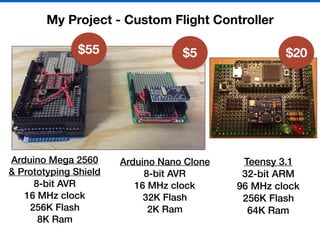
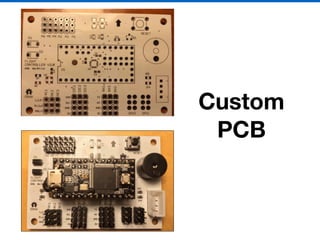
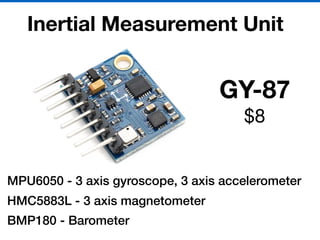
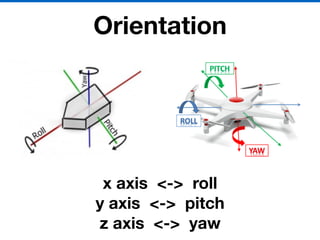
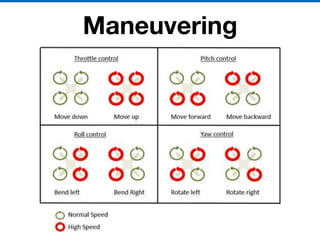
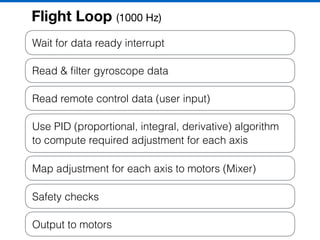
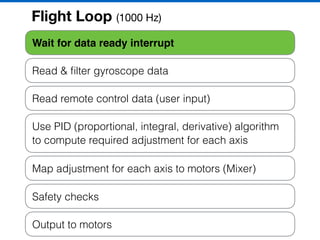
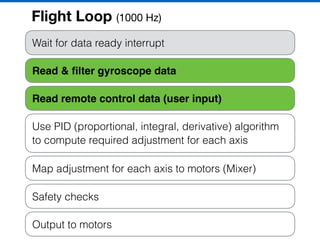
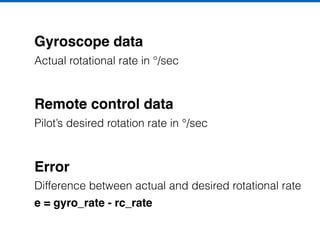
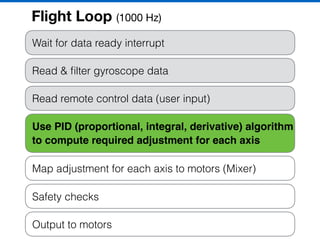
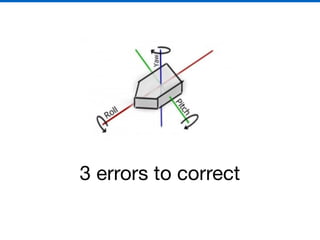
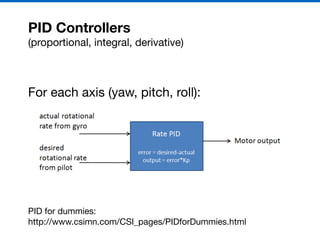
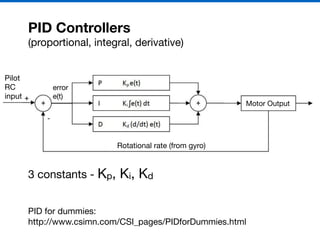
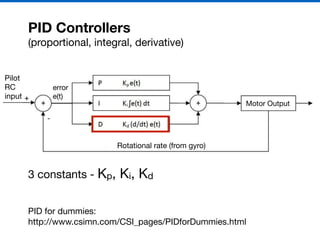
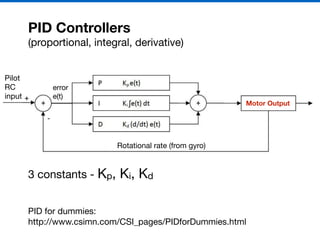
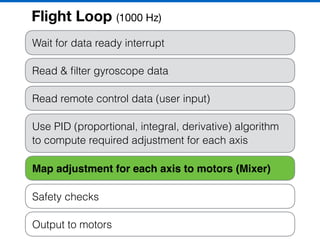
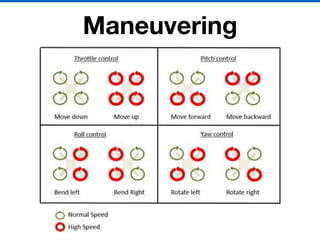
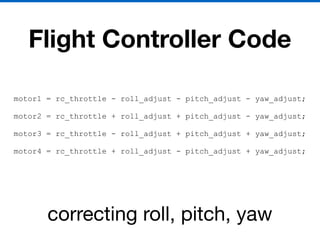
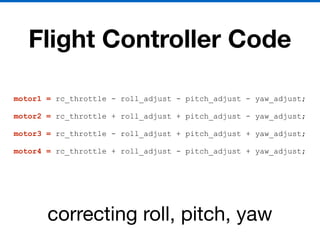
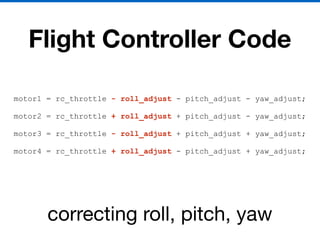
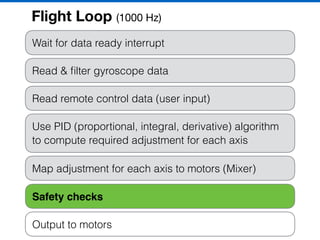
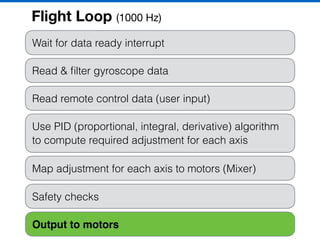
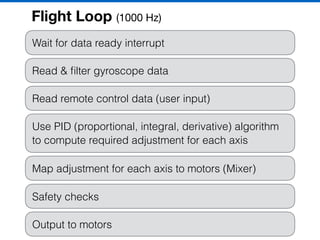
The document discusses building a custom quadcopter flight controller from scratch. It describes the key components needed including motors, batteries, flight controller, and sensors. It explains quadcopter physics involving orientation and maneuvering. The main part is the flight loop which runs at 1000Hz to read sensor data, run a PID controller to calculate motor adjustments, apply safety checks, and output to motors. The goal is to stabilize the quadcopter and allow it to respond to remote control inputs.