Concurrency Programming in Java - 03 - Essentials of Java Part 2Sachintha Gunasena
This session discusses the basic building blocks of Java as an approach to concurrent programming in Java.
It includes:
file access and permission, database access and permissions, and remote method invocation.
These are presented using examples and answers to them are linked in the references.
Kartograff is the world's first O2O (online to offline) adventure travel contest platform.
We curate unique, badass, bespoke & otherwise awesome adventures around the globe for our members to win, and this Slideshare is a detailed walkthrough on how to play the game.
ОТОЖДЕСТВЛЕНИЕ БИОЛОГИЧЕСКИХ ТКАНЕЙ С ПОМОЩЬЮ ТЕЛЕКОММУНИКАЦИОННЫХ МИКРОСИСТЕМITMO University
В статье рассматриваются телекоммуникационные способы и устройства, основанные на функциональных узлах микроскопов, для верификации (отождествления) расположения конца медицинской иглы в биологических тканях в процессе проведения медицинских операций.
1. ОПИСАНИЕ
ПОЛЕЗНОЙ
МОДЕЛИ К
ПАТЕНТУ
(12)
РЕСПУБЛИКА БЕЛАРУСЬ
НАЦИОНАЛЬНЫЙ ЦЕНТР
ИНТЕЛЛЕКТУАЛЬНОЙ
СОБСТВЕННОСТИ
(19) BY (11) 7381
(13) U
(46) 2011.06.30
(51) МПК
A 61B 17/00 (2006.01)
(54) СТЕРЕОТАКСИЧЕСКОЕ УСТРОЙСТВО
(21) Номер заявки: u 20101015
(22) 2010.12.06
(71) Заявитель: Государственное учре-
ждение "Республиканский научно-
практический центр радиационной
медицины и экологии человека"
(BY)
(72) Авторы: Цитко Евгений Леонидович;
Цитко Екатерина Владимировна; Смея-
нович Арнольд Федорович (BY)
(73) Патентообладатель: Государственное
учреждение "Республиканский науч-
но-практический центр радиационной
медицины и экологии человека" (BY)
(57)
Стереотаксическое устройство, состоящее из основания, металлических "лапок"-
фиксаторов, каретки для ультразвукового датчика, фиксирующих винтов, отличающееся
тем, что дополнительно содержит два подвижных блока основания, в которых установле-
ны с возможностью вращения вдоль транспортира две Г-образные пластины, связанные
между собой штангой, на штанге дополнительно размещена с возможностью перемеще-
ния каретка для пункционного устройства в виде двух блоков, связанных соединительной
штангой, а каретка для ультразвукового датчика дополнена блоком и соединительной
штангой.
(56)
1. Николаев А.Г. Ультразвуковое сканирование головного мозга в неотложной нейро-
хирургии: Автореф. дисс. … канд. мед. наук. - М., 1997. - С. 39-41.
BY7381U2011.06.30
2. BY 7381 U 2011.06.30
2
Полезная модель относится к медицинской технике, в частности к устройствам для
стереотаксической пункционной биопсии новообразований головного мозга, аспирации
внутримозговых гематом и абсцессов, может быть использована при нейрохирургических
операциях.
Известно стереотаксическое устройство, состоящее из основания, которое закрепляет-
ся в трепанационном окне с помощью металлических "лапок"-фиксаторов. На основании
установлено подвижное кольцо, которое скользит по всей окружности основания. На
кольце расположены две дуги, по которым передвигается каретка для установки ультра-
звуковой датчика. Фиксирующие винты, расположенные на кольцах, дугах и каретке, поз-
воляют закреплять ультразвуковой датчик или пункционные устройства в любом
положении. Данное устройство используется для стереотаксической аспирации внутри-
мозговых гематом [1] - прототип.
Технически операцию выполняют следующим образом. Локализацию трепанационно-
го отверстия определяют на основании данных компьютерной томографии. После трепа-
нации черепа в костном окне металлическими "лапками"-фиксаторами закрепляют
стереотаксическое устройство. В каретку устанавливают ультразвуковой датчик, закреп-
ляют его фиксирующими винтами и производят сканирование мозга с поверхности твер-
дой мозговой оболочки во всех возможных плоскостях. Это достигают вращением каретки
с датчиком, как вокруг оси датчика, так и перемещением каретки с датчиком по радиаль-
ным углам, что обеспечивает наклоны оси датчика к поверхности мозга под разными ра-
диальными углами. При этом конструкция устройства позволяет не смещать точку
соприкосновения головки датчика с твердой мозговой оболочкой, и эта точка рассматри-
вается как основной центр вращения и дугообразных перемещений датчика. После полу-
чения оптимального изображения гематомы, сечения, на котором гематома видна в своих
максимальных размерах, каретку устройства фиксируют. На полученном изображении
проводят соответствующие замеры: расстояние от точки сканирования до центра гемато-
мы, ее размеры и площадь сечения на данном срезе. Далее ультразвуковой зонд заменяют
канюлей электромеханического или ручного аспиратора. Конструкция каретки и стерео-
таксического устройства такова, что при установке канюли аспиратора ее ось полностью
совпадает с осью сектора сканирования. Таким образом, достигают полной сопоставимо-
сти этих осей, и при введении канюли в мозг на рассчитанную глубину конец канюли по-
падает в середину гематомы. После аспирации гематомы канюлю аспиратора извлекают, и
в каретку снова устанавливают ультразвуковой датчик и выполняют контрольное скани-
рование. В случаях недостаточного удаления гематомы пункционную аспирацию повто-
ряют. В ряде случаев возникала необходимость перестановки канюли в центр оставшейся
части гематомы. При этом новое направление и глубину повторной пункции определяют
по данным контрольного сканирования.
Недостатками данного устройства являются:
отсутствие постоянного визуального контроля над процессом пункции и аспирации в
динамически изменяющихся условиях;
невозможность одномоментного удаления жидкостного компонента патологического
очага, необходимость повторной пункции и перестановки канюли в центр оставшейся по-
лости в новом направлении и на новую глубину, что влечет за собой дополнительную
травму вещества головного мозга;
конструкция адаптера не позволяет смещать точку соприкосновения датчика с твер-
дой мозговой оболочкой, что затрудняет выбор оптимального пути доступа к патологиче-
скому очагу.
Задача, на решение которой направлена предлагаемая полезная модель, заключается в
создании устройства для стереотаксической пункционной биопсии новообразований го-
ловного мозга, которое обеспечит постоянный визуальный контроль в режиме реального
3. BY 7381 U 2011.06.30
3
времени за процессом пункции, аспирации и биопсии патологического очага и позволит
выбрать наиболее оптимальный доступ к патологическому очагу.
Задача решается за счет того, что стереотаксическое устройство состоит из основания,
металлических "лапок"-фиксаторов, каретки для ультразвукового датчика, фиксирующих
винтов, причем дополнительно содержит два подвижных блока основания, в которых
установлены с возможностью вращения вдоль транспортира две Г-образные пластины,
связанные между собой штангой, на штанге дополнительно размещена с возможностью
перемещения каретка для пункционного устройства, в виде двух блоков, связанных со-
единительной штангой, а каретка для ультразвукового датчика дополнена блоком и со-
единительной штангой.
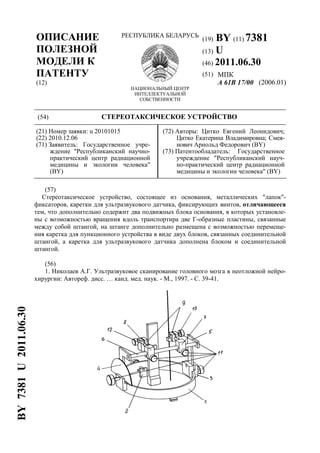
На фигуре представлен общий вид стереотаксического устройства, где 1 - основание,
2 - металлическая "лапка"-фиксатор, 3 - блок основания, 4 - транспортир, 5 - Г-образная
пластина, 6 - штанга, 7 - каретка для пункционного устройства, 8 - каретка для ультразву-
кового датчика, 9 - блок каретки, 10 - соединительная штанга, 11 - фиксирующие винты,
12 - соединительная штанга.
Стереотаксическое устройство представляет собой кольцевое металлическое основа-
ние 1 с металлическими "лапками" - фиксаторами 2. На основании 1 в диаметрально про-
тивоположных сторонах установлены два блока основания 3 с фиксирующими винтами
11. В блоках основания 3 размещены Г-образные пластины 5 с возможностью вращения
вдоль транспортира 4, предназначенного для измерения угла наклона Г-образных пластин
5. Г-образные пластины 5 жестко связаны между собой штангой 6. На штанге 6 размеще-
ны две каретки: каретка для ультразвукового датчика 8 и каретка для пункционного
устройства 7. Каретка для ультразвукового датчика 8 дополнена блоком каретки 9, имею-
щим возможность линейного и вращательного движения вдоль соединительной штанги
12. Каретка для пункционного устройства 7 выполнена в виде двух блоков каретки 9,
имеющих возможность линейного и вращательного движения вдоль соединительной
штанги 10. Блоки каретки 9 и каретки для ультразвукового датчика 8 имеют фиксирую-
щие винты 11.
На основании 1, штанге 6, соединительной штанге 10, соединительной штанге 12,
блоке каретки 9, каретке для пункционного устройства 7 и каретке для ультразвукового
датчика 8 имеются мерные деления и маркировка углов, что обеспечивает позицию всех
элементов устройства воспроизводимой. Соединительная штанга 12 каретки для ультра-
звукового датчика 8 короче соединительной штанги 10 каретки для пункционного устрой-
ства 7, таким образом, достигается совпадение осей обеих кареток. Фиксирующие винты
11 позволяют закреплять элементы стереотаксического устройства в любом положении.
Техническое выполнение операции. Локализацию трепанационного дефекта опреде-
ляют на основании данных предоперационной компьютерной или магнитно-резонансной
томографии. В костном дефекте фиксируют стереотаксическое устройство металлически-
ми "лапками"-фиксаторами 2 за края костного дефекта. В каретке для ультразвукового
датчика 8 устанавливают ультразвуковой датчик, а в каретке для пункционного устрой-
ства 7 размещают аспирационную или биопсийную канюлю. Первым этапом выполняют
ультразвуковое сканирование с поверхности твердой мозговой оболочки, в В-режиме, во
всех плоскостях и с любой точки твердой мозговой оболочки, изучая анатомо-
топографические характеристики патологического очага. Этого достигают передвижени-
ем каретки для ультразвукового датчика 8 с датчиком по соединительной штанге 12 и
вращением каретки для ультразвукового датчика 8 на соединительной штанге 12 с блоком
каретки 9 под разными углами, а также передвижением блоков основания 3 по основанию
1 и вращением Г-образных пластин 5 в блоках основания 3. В процессе сканирования
определяют кратчайший путь доступа к патологическому очагу. Выбрав точку пункции и
траекторию введения канюли, твердую мозговую оболочку точечно вскрывают и проводят
исследование зоны введения канюли в режиме цветового допплеровского картирования и
4. BY 7381 U 2011.06.30
4
энергетического допплера. Таким образом, достигают оптимального доступа к объекту-
мишени и место энцефалотомии, минуя крупные сосудистые и важные анатомические
структуры.
На полученной сонограмме измеряются линейные размеры патологического очага и
глубина залегания. Зафиксировав координаты положения: блоков основания 3 на основа-
нии 1, Г-образных пластин 5, каретки для ультразвукового датчика 8 с датчиком на соеди-
нительной штанге 12, угол ее наклона на соединительной штанге 12 и угол наклона блока
каретки 9 каретки для ультразвукового датчика 8 на соединительной штанге 12, ее сме-
щают латеральнее, а каретку для пункционного устройства 7 с пунктирующим устрой-
ством устанавливают на ее место, в соответствии с определенными координатами. После
того как обе каретки зафиксированы в своих позициях, выполняют пункцию патологиче-
ского очага и необходимые манипуляции в нем: аспирацию, санацию, дренирование или
пункционную биопсию. Каретку для ультразвукового датчика 8 с ультразвуковым датчи-
ком фиксируют латеральнее каретки для пункционного устройства 7 с пункционной ка-
нюлей так, что сектор сканирования из новой области перекрывает область сканирования
из первоначальной точки и параллелен ей. Это позволяет визуализировать патологический
очаг и зону прохождения пункционной канюли. Таким образом, ось пункционной канюли
совпадает с осью сканирования из новой точки, что позволяет контролировать процесс
пункции и аспирации на мониторе ультразвукового аппарат в режиме реального времени.
Постоянный визуальный контроль процесса аспирации или биопсии, позволяет изменять
положение пункционной канюли относительно нового центра гематомы или абсцесса го-
ловного мозга и выполнять пункционную биопсию объемного образования из разных его
участков (полипозиционная биопсия) не прибегая к повторной пункции вещества голов-
ного мозга.
Предлагаемая конструкция стереотаксического адаптера позволяет в режиме реально-
го времени контролировать процесс пункции, аспирации или биопсии патологического
очага. Наличие постоянного визуального контроля обеспечивает одномоментную аспира-
цию гематомы или абсцесса, а в случаях новообразований полипозиционную биопсию.
Свободное перемещение головки датчика по твердой мозговой оболочке позволяет вы-
брать оптимальную траекторию введения пункционного устройства.
Предлагаемая полезная модель представляет собой стереотаксическое устройство,
принцип действия которого основан на возможностях ультразвукового сканирования па-
ренхимы мозга. Это выгодно отличает его от ранее известных стереотаксических
устройств, которые основаны на данных компьютерной и/или магнитно-резонансной то-
мографии. Стоимость ультразвукового исследования значительно ниже КТ или МРТ го-
ловного мозга. Устройство не требует дополнительного программного обеспечения, для
расчета оптимальной траектории доступа к патологическому очагу. При этом использова-
ние цветокодированных допплеровских методик предоставляет возможность визуализи-
ровать кровоток в образовании и рядом расположенном веществе мозга, что позволяет
выбрать путь доступа к объекту-мишени через бессосудистую зону. Устройство легко
применимо в любой операционной учреждений здравоохранения, где выполняются пла-
новые или экстренные нейрохирургические вмешательства.
Национальный центр интеллектуальной собственности.
220034, г. Минск, ул. Козлова, 20.
![BY 7381 U 2011.06.30
2
Полезная модель относится к медицинской технике, в частности к устройствам для
стереотаксической пункционной биопсии новообразований головного мозга, аспирации
внутримозговых гематом и абсцессов, может быть использована при нейрохирургических
операциях.
Известно стереотаксическое устройство, состоящее из основания, которое закрепляет-
ся в трепанационном окне с помощью металлических "лапок"-фиксаторов. На основании
установлено подвижное кольцо, которое скользит по всей окружности основания. На
кольце расположены две дуги, по которым передвигается каретка для установки ультра-
звуковой датчика. Фиксирующие винты, расположенные на кольцах, дугах и каретке, поз-
воляют закреплять ультразвуковой датчик или пункционные устройства в любом
положении. Данное устройство используется для стереотаксической аспирации внутри-
мозговых гематом [1] - прототип.
Технически операцию выполняют следующим образом. Локализацию трепанационно-
го отверстия определяют на основании данных компьютерной томографии. После трепа-
нации черепа в костном окне металлическими "лапками"-фиксаторами закрепляют
стереотаксическое устройство. В каретку устанавливают ультразвуковой датчик, закреп-
ляют его фиксирующими винтами и производят сканирование мозга с поверхности твер-
дой мозговой оболочки во всех возможных плоскостях. Это достигают вращением каретки
с датчиком, как вокруг оси датчика, так и перемещением каретки с датчиком по радиаль-
ным углам, что обеспечивает наклоны оси датчика к поверхности мозга под разными ра-
диальными углами. При этом конструкция устройства позволяет не смещать точку
соприкосновения головки датчика с твердой мозговой оболочкой, и эта точка рассматри-
вается как основной центр вращения и дугообразных перемещений датчика. После полу-
чения оптимального изображения гематомы, сечения, на котором гематома видна в своих
максимальных размерах, каретку устройства фиксируют. На полученном изображении
проводят соответствующие замеры: расстояние от точки сканирования до центра гемато-
мы, ее размеры и площадь сечения на данном срезе. Далее ультразвуковой зонд заменяют
канюлей электромеханического или ручного аспиратора. Конструкция каретки и стерео-
таксического устройства такова, что при установке канюли аспиратора ее ось полностью
совпадает с осью сектора сканирования. Таким образом, достигают полной сопоставимо-
сти этих осей, и при введении канюли в мозг на рассчитанную глубину конец канюли по-
падает в середину гематомы. После аспирации гематомы канюлю аспиратора извлекают, и
в каретку снова устанавливают ультразвуковой датчик и выполняют контрольное скани-
рование. В случаях недостаточного удаления гематомы пункционную аспирацию повто-
ряют. В ряде случаев возникала необходимость перестановки канюли в центр оставшейся
части гематомы. При этом новое направление и глубину повторной пункции определяют
по данным контрольного сканирования.
Недостатками данного устройства являются:
отсутствие постоянного визуального контроля над процессом пункции и аспирации в
динамически изменяющихся условиях;
невозможность одномоментного удаления жидкостного компонента патологического
очага, необходимость повторной пункции и перестановки канюли в центр оставшейся по-
лости в новом направлении и на новую глубину, что влечет за собой дополнительную
травму вещества головного мозга;
конструкция адаптера не позволяет смещать точку соприкосновения датчика с твер-
дой мозговой оболочкой, что затрудняет выбор оптимального пути доступа к патологиче-
скому очагу.
Задача, на решение которой направлена предлагаемая полезная модель, заключается в
создании устройства для стереотаксической пункционной биопсии новообразований го-
ловного мозга, которое обеспечит постоянный визуальный контроль в режиме реального](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)