Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
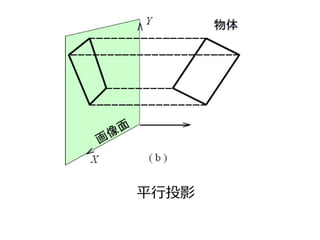
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
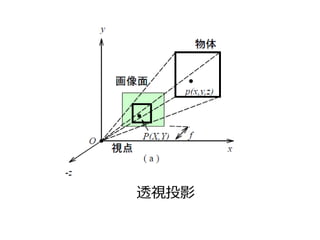
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
keima_12
6,967 views
静岡Developers勉強会コンピュータビジョンvol4発表用資料
静岡Developers勉強会コンピュータビジョンvol4の発表用の資料です。
Technology
◦
Read more
5
Save
Share
Embed
Embed presentation
Download
Downloaded 21 times
1
/ 125
2
/ 125
3
/ 125
4
/ 125
5
/ 125
6
/ 125
7
/ 125
8
/ 125
9
/ 125
10
/ 125
11
/ 125
12
/ 125
13
/ 125
14
/ 125
15
/ 125
16
/ 125
17
/ 125
18
/ 125
19
/ 125
20
/ 125
21
/ 125
22
/ 125
23
/ 125
24
/ 125
25
/ 125
26
/ 125
27
/ 125
28
/ 125
29
/ 125
30
/ 125
31
/ 125
32
/ 125
33
/ 125
34
/ 125
35
/ 125
36
/ 125
37
/ 125
38
/ 125
39
/ 125
40
/ 125
41
/ 125
42
/ 125
43
/ 125
44
/ 125
45
/ 125
46
/ 125
47
/ 125
48
/ 125
49
/ 125
50
/ 125
51
/ 125
52
/ 125
53
/ 125
54
/ 125
55
/ 125
56
/ 125
57
/ 125
58
/ 125
59
/ 125
60
/ 125
61
/ 125
62
/ 125
63
/ 125
64
/ 125
65
/ 125
66
/ 125
67
/ 125
68
/ 125
69
/ 125
70
/ 125
71
/ 125
72
/ 125
73
/ 125
74
/ 125
75
/ 125
76
/ 125
77
/ 125
78
/ 125
79
/ 125
80
/ 125
81
/ 125
82
/ 125
83
/ 125
84
/ 125
85
/ 125
86
/ 125
87
/ 125
88
/ 125
89
/ 125
90
/ 125
91
/ 125
92
/ 125
93
/ 125
94
/ 125
95
/ 125
96
/ 125
97
/ 125
98
/ 125
99
/ 125
100
/ 125
101
/ 125
102
/ 125
103
/ 125
104
/ 125
105
/ 125
106
/ 125
107
/ 125
108
/ 125
109
/ 125
110
/ 125
111
/ 125
112
/ 125
113
/ 125
114
/ 125
115
/ 125
116
/ 125
117
/ 125
118
/ 125
119
/ 125
120
/ 125
121
/ 125
122
/ 125
123
/ 125
124
/ 125
125
/ 125
More Related Content
PPTX
関東コンピュータビジョン勉強会
by
nonane
PPTX
Structure from Motion
by
Ryutaro Yamauchi
PPTX
20150328 cv関東勉強会 sumisumithパート_v1.3
by
sumisumith
PPTX
第28回コンピュータビジョン勉強会@関東(kanejaki担当分)
by
kanejaki
PDF
28th CV勉強会@関東 #3
by
Hiroki Mizuno
PPTX
Cvim saisentan-5-2-tomoaki
by
tomoaki0705
PPTX
SLAM勉強会(PTAM)
by
Masaya Kaneko
PDF
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
関東コンピュータビジョン勉強会
by
nonane
Structure from Motion
by
Ryutaro Yamauchi
20150328 cv関東勉強会 sumisumithパート_v1.3
by
sumisumith
第28回コンピュータビジョン勉強会@関東(kanejaki担当分)
by
kanejaki
28th CV勉強会@関東 #3
by
Hiroki Mizuno
Cvim saisentan-5-2-tomoaki
by
tomoaki0705
SLAM勉強会(PTAM)
by
Masaya Kaneko
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
What's hot
PPTX
SLAM勉強会(3) LSD-SLAM
by
Iwami Kazuya
PPTX
CNN-SLAMざっくり
by
EndoYuuki
PPTX
LSD-SLAM:Large Scale Direct Monocular SLAM
by
EndoYuuki
PPTX
20160612 関東cv勉強会 sumisumithパート
by
sumisumith
PDF
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
PDF
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
PPTX
論文読み会2018 (CodeSLAM)
by
Masaya Kaneko
PPTX
Camera calibration
by
Takahashi Kosuke
PDF
SSII2021 [OS3] 広域環境の3D計測と認識 ~ 人が活動する場のセンシングとモデル化 ~(オーガナイザーによる冒頭の導入)
by
SSII
PDF
第41回関東CV勉強会 CNN-SLAM
by
邦洋 長谷川
PPT
Light weightbinocular sigasia2012_face
by
ishii yasunori
PDF
論文読み会(DeMoN;CVPR2017)
by
Masaya Kaneko
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PPTX
Bachelor Presentation
by
Dzul Fahmi
PDF
論文紹介:Using the Forest to See the Trees: A Graphical. Model Relating Features,...
by
Takuma Yagi
PDF
Probabilistic Graphical Models 輪読会 #1
by
Takuma Yagi
PDF
RBM、Deep Learningと学習(全脳アーキテクチャ若手の会 第3回DL勉強会発表資料)
by
Takuma Yagi
PPTX
プロジェクト
by
光稀 松本
PDF
深層学習 勉強会第5回 ボルツマンマシン
by
Yuta Sugii
PDF
ディープボルツマンマシン入門
by
Saya Katafuchi
SLAM勉強会(3) LSD-SLAM
by
Iwami Kazuya
CNN-SLAMざっくり
by
EndoYuuki
LSD-SLAM:Large Scale Direct Monocular SLAM
by
EndoYuuki
20160612 関東cv勉強会 sumisumithパート
by
sumisumith
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
論文読み会2018 (CodeSLAM)
by
Masaya Kaneko
Camera calibration
by
Takahashi Kosuke
SSII2021 [OS3] 広域環境の3D計測と認識 ~ 人が活動する場のセンシングとモデル化 ~(オーガナイザーによる冒頭の導入)
by
SSII
第41回関東CV勉強会 CNN-SLAM
by
邦洋 長谷川
Light weightbinocular sigasia2012_face
by
ishii yasunori
論文読み会(DeMoN;CVPR2017)
by
Masaya Kaneko
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
Bachelor Presentation
by
Dzul Fahmi
論文紹介:Using the Forest to See the Trees: A Graphical. Model Relating Features,...
by
Takuma Yagi
Probabilistic Graphical Models 輪読会 #1
by
Takuma Yagi
RBM、Deep Learningと学習(全脳アーキテクチャ若手の会 第3回DL勉強会発表資料)
by
Takuma Yagi
プロジェクト
by
光稀 松本
深層学習 勉強会第5回 ボルツマンマシン
by
Yuta Sugii
ディープボルツマンマシン入門
by
Saya Katafuchi
Viewers also liked
PDF
2014/07/19_静岡Developers勉強会_実践コンピュータビジョンvol.6_「6章:画像のクラスタリング」
by
shun_kabata
PDF
コンピュータビジョン7章資料_20140830読書会
by
Nao Oec
PPTX
実践コンピュータビジョン8章
by
Kazufumi Ohkawa
PDF
実践コンピュータビジョン 9章 画像の領域分割
by
yaju88
PDF
ゲームアプリの数学@プログラマのための数学勉強会
by
Ryuichi Kubuki
PDF
2008 Vsug Leaders Summit Lightning Talks Numaguchi
by
vsug_jim
PDF
THETAで撮影した写真を球体ディスプレイに映してみた #thetafan
by
Tsubasa Yumura
PPTX
Pinhole
by
d_k_morimoto
PPTX
さるでも分かりたい9dofで作るクォータニオン姿勢
by
ytanno
PDF
楽しいクォータニオンの世界 田所 第二回Rogyゼミ
by
rogy01
PPTX
OpenCV 百聞は一見にしかず
by
mq_nakamura
PDF
静岡Developers勉強会コンピュータビジョンvol2
by
niku9Tenhou
PDF
実践コンピュータビジョン 3章 画像間の写像
by
yaju88
PDF
「3Dゲームをおもしろくする技術 」のいろいろな読み方
by
Kouji Ohno
PPTX
カルマンフィルタについて
by
tiny_ak
PDF
人工知能のための哲学塾 東洋哲学篇 第零夜 資料
by
Youichiro Miyake
PPTX
50分でわかるブループリントについて
by
Masahiko Nakamura
PPTX
猫でもわかるUnreal Engine4
by
pafuhana 1213
PDF
サザエさんのじゃんけん データ分析
by
yaju88
PPTX
PRML第6章「カーネル法」
by
Keisuke Sugawara
2014/07/19_静岡Developers勉強会_実践コンピュータビジョンvol.6_「6章:画像のクラスタリング」
by
shun_kabata
コンピュータビジョン7章資料_20140830読書会
by
Nao Oec
実践コンピュータビジョン8章
by
Kazufumi Ohkawa
実践コンピュータビジョン 9章 画像の領域分割
by
yaju88
ゲームアプリの数学@プログラマのための数学勉強会
by
Ryuichi Kubuki
2008 Vsug Leaders Summit Lightning Talks Numaguchi
by
vsug_jim
THETAで撮影した写真を球体ディスプレイに映してみた #thetafan
by
Tsubasa Yumura
Pinhole
by
d_k_morimoto
さるでも分かりたい9dofで作るクォータニオン姿勢
by
ytanno
楽しいクォータニオンの世界 田所 第二回Rogyゼミ
by
rogy01
OpenCV 百聞は一見にしかず
by
mq_nakamura
静岡Developers勉強会コンピュータビジョンvol2
by
niku9Tenhou
実践コンピュータビジョン 3章 画像間の写像
by
yaju88
「3Dゲームをおもしろくする技術 」のいろいろな読み方
by
Kouji Ohno
カルマンフィルタについて
by
tiny_ak
人工知能のための哲学塾 東洋哲学篇 第零夜 資料
by
Youichiro Miyake
50分でわかるブループリントについて
by
Masahiko Nakamura
猫でもわかるUnreal Engine4
by
pafuhana 1213
サザエさんのじゃんけん データ分析
by
yaju88
PRML第6章「カーネル法」
by
Keisuke Sugawara
Similar to 静岡Developers勉強会コンピュータビジョンvol4発表用資料
PPTX
20190227 第51回CV勉強会@関東
by
Kyohei Unno
PPTX
Kantocv 2-1-calibration publish
by
tomoaki0705
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PDF
Fusion4dIntroduction
by
Hideki Iwasawa
PDF
第126回 ロボット工学セミナー 三次元点群と深層学習
by
Naoya Chiba
PDF
点群深層学習 Meta-study
by
Naoya Chiba
PDF
「SSII2025 奥行き白線画像群のCNN回帰による焦点距離の自動キャリブレーション」論文
by
doboncho
PPT
3D cybercode wiss1996
by
Jun Rekimoto
PDF
BA-Net: Dense Bundle Adjustment Network (3D勉強会@関東)
by
Mai Nishimura
PDF
Yoshio Kato Bachelor Thesis
by
pflab
PDF
【DLゼミ】XFeat: Accelerated Features for Lightweight Image Matching
by
harmonylab
PDF
SSII2020 [O3-01] Extreme 3D センシング
by
SSII
PDF
20140726 関東cv勉強会
by
M Kimura
PDF
Visual slam
by
Takuya Minagawa
PDF
コンピュテーショナルフォトグラフティの基礎
by
Norishige Fukushima
PPTX
Unsupervised Learning of Probably Symmetric Deformable 3D Objects from Images...
by
Kento Doi
PDF
【DL輪読会】Monocular real time volumetric performance capture
by
Deep Learning JP
PDF
Reconstructing the World’s Museums
by
ketsumedo_yarou
PPTX
SSII2020TS: 物理ベースビジョンの過去・現在・未来 〜 カメラ・物体・光のインタラクションを モデル化するには 〜
by
SSII
PDF
Taking a Deeper Look at the Inverse Compositional Algorithm
by
Mai Nishimura
20190227 第51回CV勉強会@関東
by
Kyohei Unno
Kantocv 2-1-calibration publish
by
tomoaki0705
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
Fusion4dIntroduction
by
Hideki Iwasawa
第126回 ロボット工学セミナー 三次元点群と深層学習
by
Naoya Chiba
点群深層学習 Meta-study
by
Naoya Chiba
「SSII2025 奥行き白線画像群のCNN回帰による焦点距離の自動キャリブレーション」論文
by
doboncho
3D cybercode wiss1996
by
Jun Rekimoto
BA-Net: Dense Bundle Adjustment Network (3D勉強会@関東)
by
Mai Nishimura
Yoshio Kato Bachelor Thesis
by
pflab
【DLゼミ】XFeat: Accelerated Features for Lightweight Image Matching
by
harmonylab
SSII2020 [O3-01] Extreme 3D センシング
by
SSII
20140726 関東cv勉強会
by
M Kimura
Visual slam
by
Takuya Minagawa
コンピュテーショナルフォトグラフティの基礎
by
Norishige Fukushima
Unsupervised Learning of Probably Symmetric Deformable 3D Objects from Images...
by
Kento Doi
【DL輪読会】Monocular real time volumetric performance capture
by
Deep Learning JP
Reconstructing the World’s Museums
by
ketsumedo_yarou
SSII2020TS: 物理ベースビジョンの過去・現在・未来 〜 カメラ・物体・光のインタラクションを モデル化するには 〜
by
SSII
Taking a Deeper Look at the Inverse Compositional Algorithm
by
Mai Nishimura
静岡Developers勉強会コンピュータビジョンvol4発表用資料
1.
静岡Developers勉強会 コンピュータビジョン vol.4
2.
実践コンピュータ ビジョン
3.
第4章 カメラモデルと 拡張現実感
4.
今回の概要
5.
・ピンホールカメラモデル ・カメラキャリブレーション ・平面とマーカーを使った姿勢推定
・拡張現実感
6.
ピンホール カメラモデル
7.
身近なもの
8.
目、カメラ
9.
原理
10.
投影
11.
投影の 種類
12.
平行投影 (正射影)
13.
特徴
14.
距離が離れてい ても座標が変わ らない
15.
物体と投影面の 座標の関係
16.
x '=x ,
y '=y x , y x ' , y ':スクリーン上の座標 :実座標
17.
平行投影
18.
平行投影はカメ ラモデルとは関 係がない
19.
カメラモデルの 射影方法
20.
透視投影 (中心射影)
21.
特徴
22.
近くのものは大 きく、遠くのも のは小さく映る
23.
物体と投影面の 座標の関係
24.
x '=xz ,
y '= y z x ' , y ' :スクリーン上の座標 x , y , z :実座標
25.
透視投影
26.
問題点
27.
カメラのレンズ中 心が座標の原点に なければと成り立
たない。
28.
焦点距離は1に正 規化されている
29.
どうすればレンズ中 心と焦点距離が任意 の値でも平面に投影
することが出来るの か
30.
カメラ行列
31.
λx=PX x P
X 画像上の座標 λ 奥行の逆数 カメラ行列 被写体の座標
32.
もう少し 詳しく
33.
λx=K [R∣t ]
X K t カメラの位置 キャリブレーション行列 R カメラの向き
34.
もっと詳 しく
35.
キャリブ レーション 行列の内容
36.
K=(αf s Cx
0 f Cy 0 0 1 ) α アスペクト比 s スキュー f 焦点距離 Cx ,Cy画像中心
37.
アスペクト比は焦 点距離の縦横の比 である
38.
アスペクト比が1でない場合、別々 焦点距離の値を使用する f
= f y , αf = f x のとき、 α=1 縦横の焦点距離が同じ場合 f = f y= f x
39.
焦点距離はカメラ のレンズによって 決まる
40.
基本的にアスペク ト比の値は1と仮定 してよい
41.
スキューの概要につ いては3章参照。
42.
撮像素子が少しずれて いるためスキューを考 慮しなければならない
場合があるが基本的に 値は0と仮定してよい
43.
カメラの向きR は回転行列
44.
R=(r11 r12 r13
r21 r22 r23 r31 r32 r33)
45.
はカメラ位置 のベクトル t
46.
t=(t x t
y t z)
47.
[R∣t ]はカメラの位置と向き を表したの3×4の行列
48.
[R∣t ]=(r11 r12
r13 t x r21 r22 r23 t y r31 r32 r33 t z)
49.
X は被写体の座標 同次行列で表現する
50.
xは画像平面の座標の 同次行列
51.
全部まとめ ると
52.
λ(x yz 0
f cy 0 0 1 )(r11 r12 r13 tx )=(f 0 cx r21 r22 r23 t )(X Y y r31 r32 r33 t zZW )
53.
4.1.2.camera.py
54.
準備
55.
モデルファイルを ダウンロードする
56.
URL http://www.robots.ox.ac.uk/~vgg/data/data-mview.html http://www.robots.ox.ac.uk/~vgg/data/dunster/3D.tar.gz
からダウンロード、解 凍しhouse.p3dファイ ルを取得する
57.
4.1.2.camera.py と同じフォルダに モデルファイルを
置く
58.
実行結果
61.
コードの 説明
62.
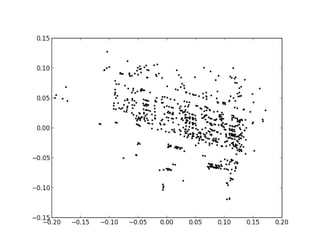
1つ目の画像は、カメラの向きを回転せず、に透視投影 した画像である。カメラ行列の設定と射影は12行~14行 で行っている
P = hstack((eye(3),array([[0],[0],[-10]]))) cam = camera.Camera(P) x = cam.project(points) カメラ行列P=(Pの設定、内容は以下の通り1 0 0 0 0 1 0 0 ) である 0 0 1 −10
63.
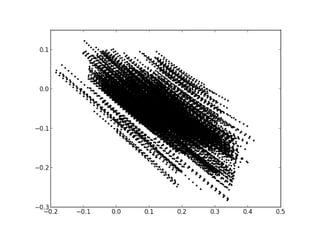
2つ目の画像は、カメラの向きをランダムに回転軸と回 転量を決め、20回透視投影した結果を重ねた画像であ る。カメラ行列の設定は23行~24行で行って、投影は
28行~31行で行っている r = 0.05*random.rand(3) rot = camera.rotation_matrix(r) figure() for t in range(20): cam.P = dot(cam.P,rot) x = cam.project(points) plot(x[0],x[1],'k.') show()
64.
次の話
65.
カメラ行 列の分解
66.
カメラ行列だけ分かってい る場合、キャリブレーショ ン行列とカメラの位置と向
きを求めるにはどうすれば いいのか。
67.
RQ分解
68.
RQ分解を行うとキャ リブレーション行列 と、カメラの向き(回
転行列)を求めること が出来る
69.
カメラの位置は、カメラ 行列の4列目に対して、 キャリブレーション行列
の逆行列をかけることで 求めることが出来る。
70.
カメラ中心は以下の式で 求めることが出来る C=−RT
t
71.
次の話
72.
カメラキャリ ブレーション (校正)
73.
キャリブレー ション行列Kを 推定する作業
74.
方法
75.
長方形の物体の 幅、高さを測定 する
76.
平らな台にカメ ラと物体を置 く。物体はカメ
ラ中央に置く
77.
物体とカメラの 間の距離を測定 する。この結果
をdzとする
78.
写真を撮影する
79.
画像上の物体の 幅と高さをピク セル単位で測定
する
80.
結果
81.
f x=2555 f
y=2586
82.
カメラキャリブ レーションにお ける注意点
83.
撮像素子の画素 数で結果が変わ る
84.
市販のカメラのほとん どが、焦点距離の可変 (光学ズーム機能)を有
しているので、キャリ ブレーションを行うさ いはズームを行わない
85.
次の話
86.
平面とマーカを 使った姿勢推定
87.
概要
88.
マーカ画像とマーカ画像 が映っている画像のホモ グラフィを計算する。ホ
モグラフィから、カメラ 行列を求め、マーカ上に 立方体を射影する
89.
準備
90.
以下のファイルを 4.3.cube.pyと同じ フォルダに置く。
book_frontal.JPG book_perspective.JPG
91.
実行 結果
95.
コードの 説明
96.
SIFTによって2つの画像の特徴点を取得す る。 (20行~24行)
sift.process_image('book_frontal.JPG','im0.sift') l0,d0 = sift.read_features_from_file('im0.sift') sift.process_image('book_perspective.JPG','im1.sift') l1,d1 = sift.read_features_from_file('im1.sift')
97.
特徴点からホモグラフィーを推定す る。(27行~34行) matches
= sift.match_twosided(d0,d1) ndx = matches.nonzero()[0] fp = homography.make_homog(l0[ndx,:2].T) ndx2 = [int(matches[i]) for i in ndx] tp = homography.make_homog(l1[ndx2,:2].T) model = homography.RansacModel() H = homography.H_from_ransac(fp,tp,model)[0]
98.
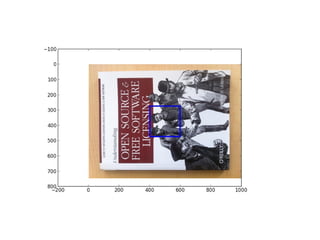
キャリブレーション行列の作成 (10行) my_calibration関数
99.
最初の画像(正面から撮った画像) に変換をしていないカメラ行列を用い て立方体を射影(73行)
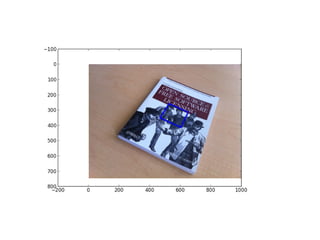
100.
2枚目の画像に(横から撮った画像) にホモグラフィを用いて立方体を射影 (80行~81行)
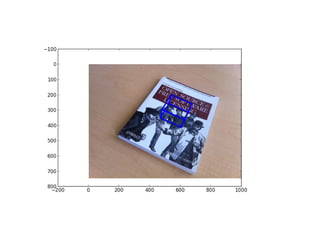
101.
2枚目の画像に(横から撮った画像) にホモグラフィによって変換したカメ ラ行列を用いて立方体を射影
(81行~82行)
102.
ホモグラフィー推定後、 カメラ行列を取得する。 事前に用意した正方形と
立方体の座標をカメラ行 列を用いて射影する。
103.
拡張現 実感
104.
概要
105.
マーカ画像上に 3DCGを描画す る
106.
準備
107.
ライブラリのイ ンストール
108.
PyGame PyOpenGL
109.
4.4.4.teapot.pyの 準備
110.
book_perspective.bm pとar_camera.pklを 4.4.4.teapot.pyと同じ
フォルダに置く
111.
コードの 説明
112.
4.3で作成したarcamera.pklを読み込みカメラ 行列を取得する。 (119行目~121行目)
with open('ar_camera.pkl','r') as f: K = pickle.load(f) Rt = pickle.load(f)
113.
四角形のオブジェクトを用いて背景画 像を描画する。 (65行 draw_background関数)
114.
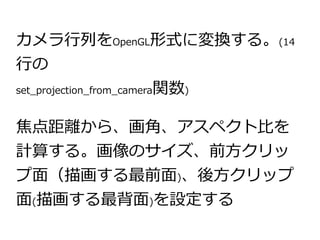
カメラ行列をOpenGL形式に変換する。(14 行の set_projection_from_camera関数)
焦点距離から、画角、アスペクト比を 計算する。画像のサイズ、前方クリッ プ面(描画する最前面)、後方クリップ 面(描画する最背面)を設定する
115.
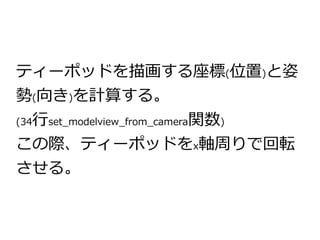
ティーポッドを描画する座標(位置)と姿 勢(向き)を計算する。 (34行set_modelview_from_camera関数)
この際、ティーポッドをx軸周りで回転 させる。
116.
ティーポッドを描画する (95行 draw_teapot関数)
117.
4.4.5.toyplane.pyの 準備
118.
オブジェクトファイルの ダウンロードし、toyplane.obj を取得する
http://www.oyonale.com/modeles.php?page=56
119.
mtlファイルの作成 toyplane.mtlを作成する newmtl
lightblue Kd 0.5 0.75 1.0 illum 1
120.
オブジェクトファイルのusemtl タグを以下のように変更する usemtl
lightblue
121.
objloader.pyの作成 http://www.pygame.org/wiki/OBJFileLoader 上側のソースをコピー
(MLT関数、OBJクラスが記述さ れている箇所)
122.
4.4.5.toyplane.pyと同じフォル ダに作成したファイルを保存す る。
123.
コードの 説明
124.
4.4.4.teapot.pyと処理内容 はほぼ同じだが、違いはobj 形式のファイルを読み込み、
描画している。
125.
以上
Download






![λx=K [R∣t ] X
K
t カメラの位置
キャリブレーション行列
R カメラの向き](https://image.slidesharecdn.com/4-141130081201-conversion-gate02/85/Developers-vol4-33-320.jpg)
![[R∣t ]はカメラの位置と向き
を表したの3×4の行列](https://image.slidesharecdn.com/4-141130081201-conversion-gate02/85/Developers-vol4-47-320.jpg)
![[R∣t ]=(r11 r12 r13 t x
r21 r22 r23 t y
r31 r32 r33 t z)](https://image.slidesharecdn.com/4-141130081201-conversion-gate02/85/Developers-vol4-48-320.jpg)


![1つ目の画像は、カメラの向きを回転せず、に透視投影
した画像である。カメラ行列の設定と射影は12行~14行
で行っている
P = hstack((eye(3),array([[0],[0],[-10]])))
cam = camera.Camera(P)
x = cam.project(points)
カメラ行列P=(Pの設定、内容は以下の通り1 0 0 0
0 1 0 0
)
である
0 0 1 −10](https://image.slidesharecdn.com/4-141130081201-conversion-gate02/85/Developers-vol4-62-320.jpg)
![2つ目の画像は、カメラの向きをランダムに回転軸と回
転量を決め、20回透視投影した結果を重ねた画像であ
る。カメラ行列の設定は23行~24行で行って、投影は
28行~31行で行っている
r = 0.05*random.rand(3)
rot = camera.rotation_matrix(r)
figure()
for t in range(20):
cam.P = dot(cam.P,rot)
x = cam.project(points)
plot(x[0],x[1],'k.')
show()](https://image.slidesharecdn.com/4-141130081201-conversion-gate02/85/Developers-vol4-63-320.jpg)






![特徴点からホモグラフィーを推定す
る。(27行~34行)
matches = sift.match_twosided(d0,d1)
ndx = matches.nonzero()[0]
fp = homography.make_homog(l0[ndx,:2].T)
ndx2 = [int(matches[i]) for i in ndx]
tp = homography.make_homog(l1[ndx2,:2].T)
model = homography.RansacModel()
H = homography.H_from_ransac(fp,tp,model)[0]](https://image.slidesharecdn.com/4-141130081201-conversion-gate02/85/Developers-vol4-97-320.jpg)

















![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2021 [OS3] 広域環境の3D計測と認識 ~ 人が活動する場のセンシングとモデル化 ~(オーガナイザーによる冒頭の導入)](https://cdn.slidesharecdn.com/ss_thumbnails/os3-01-210605061816-thumbnail.jpg?width=640&height=640&fit=bounds)










































![SSII2020 [O3-01] Extreme 3D センシング](https://cdn.slidesharecdn.com/ss_thumbnails/200612-ssii-extreme3dsensing-print3-200608114658-thumbnail.jpg?width=640&height=640&fit=bounds)







