Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
MK
Uploaded by
Masaya Kaneko
PPTX, PDF
3,709 views
論文読み会2018 (CodeSLAM)
研究室内の論文読み会でCodeSLAM (CVPR2018; Honorable Mention) を発表した際の資料です
Engineering
◦
Related topics:
Deep Learning
•
Read more
6
Save
Share
Embed
Embed presentation
Download
Downloaded 72 times
1
/ 29
2
/ 29
3
/ 29
4
/ 29
5
/ 29
6
/ 29
7
/ 29
8
/ 29
9
/ 29
10
/ 29
11
/ 29
12
/ 29
13
/ 29
14
/ 29
15
/ 29
16
/ 29
17
/ 29
18
/ 29
19
/ 29
20
/ 29
21
/ 29
22
/ 29
23
/ 29
24
/ 29
25
/ 29
26
/ 29
27
/ 29
28
/ 29
29
/ 29
More Related Content
PDF
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PDF
【メタサーベイ】Neural Fields
by
cvpaper. challenge
PDF
Neural scene representation and rendering の解説(第3回3D勉強会@関東)
by
Masaya Kaneko
PPTX
LSD-SLAM:Large Scale Direct Monocular SLAM
by
EndoYuuki
PDF
SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜
by
SSII
PDF
[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
by
Deep Learning JP
PDF
【DL輪読会】NeRF-VAE: A Geometry Aware 3D Scene Generative Model
by
Deep Learning JP
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
【メタサーベイ】Neural Fields
by
cvpaper. challenge
Neural scene representation and rendering の解説(第3回3D勉強会@関東)
by
Masaya Kaneko
LSD-SLAM:Large Scale Direct Monocular SLAM
by
EndoYuuki
SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜
by
SSII
[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
by
Deep Learning JP
【DL輪読会】NeRF-VAE: A Geometry Aware 3D Scene Generative Model
by
Deep Learning JP
What's hot
PDF
【メタサーベイ】Vision and Language のトップ研究室/研究者
by
cvpaper. challenge
PDF
【メタサーベイ】Video Transformer
by
cvpaper. challenge
PDF
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
PDF
【メタサーベイ】数式ドリブン教師あり学習
by
cvpaper. challenge
PPTX
Depth from Videos in the Wild: Unsupervised Monocular Depth Learning from Unk...
by
Kazuyuki Miyazawa
PDF
SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜
by
SSII
PPTX
【DL輪読会】Flamingo: a Visual Language Model for Few-Shot Learning 画像×言語の大規模基盤モ...
by
Deep Learning JP
PDF
[DL輪読会]BANMo: Building Animatable 3D Neural Models from Many Casual Videos
by
Deep Learning JP
PDF
オープンソース SLAM の分類
by
Yoshitaka HARA
PDF
cvpaper.challenge 研究効率化 Tips
by
cvpaper. challenge
PDF
【ECCV 2022】NeDDF: Reciprocally Constrained Field for Distance and Density
by
cvpaper. challenge
PPTX
SLAM勉強会(PTAM)
by
Masaya Kaneko
PDF
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
PPTX
【DL輪読会】Flow Matching for Generative Modeling
by
Deep Learning JP
PDF
[DL輪読会]A Higher-Dimensional Representation for Topologically Varying Neural R...
by
Deep Learning JP
PDF
画像認識の初歩、SIFT,SURF特徴量
by
takaya imai
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PDF
三次元点群を取り扱うニューラルネットワークのサーベイ
by
Naoya Chiba
PPTX
空撮画像技術と3次元リアルタイムデータの可視化について
by
Ryousuke Wayama
PPTX
関東コンピュータビジョン勉強会
by
nonane
【メタサーベイ】Vision and Language のトップ研究室/研究者
by
cvpaper. challenge
【メタサーベイ】Video Transformer
by
cvpaper. challenge
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
【メタサーベイ】数式ドリブン教師あり学習
by
cvpaper. challenge
Depth from Videos in the Wild: Unsupervised Monocular Depth Learning from Unk...
by
Kazuyuki Miyazawa
SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜
by
SSII
【DL輪読会】Flamingo: a Visual Language Model for Few-Shot Learning 画像×言語の大規模基盤モ...
by
Deep Learning JP
[DL輪読会]BANMo: Building Animatable 3D Neural Models from Many Casual Videos
by
Deep Learning JP
オープンソース SLAM の分類
by
Yoshitaka HARA
cvpaper.challenge 研究効率化 Tips
by
cvpaper. challenge
【ECCV 2022】NeDDF: Reciprocally Constrained Field for Distance and Density
by
cvpaper. challenge
SLAM勉強会(PTAM)
by
Masaya Kaneko
SLAMチュートリアル大会資料(ORB-SLAM)
by
Masaya Kaneko
【DL輪読会】Flow Matching for Generative Modeling
by
Deep Learning JP
[DL輪読会]A Higher-Dimensional Representation for Topologically Varying Neural R...
by
Deep Learning JP
画像認識の初歩、SIFT,SURF特徴量
by
takaya imai
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
三次元点群を取り扱うニューラルネットワークのサーベイ
by
Naoya Chiba
空撮画像技術と3次元リアルタイムデータの可視化について
by
Ryousuke Wayama
関東コンピュータビジョン勉強会
by
nonane
Similar to 論文読み会2018 (CodeSLAM)
PPTX
CNN-SLAMざっくり
by
EndoYuuki
PDF
20190307 visualslam summary
by
Takuya Minagawa
PPTX
GN-Net: The Gauss-Newton Loss for Deep Direct SLAMの解説
by
Masaya Kaneko
PDF
ICCV2019読み会「Learning Meshes for Dense Visual SLAM」
by
Sho Kagami
PPTX
SLAM勉強会(3) LSD-SLAM
by
Iwami Kazuya
PDF
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
PDF
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
PDF
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
PDF
Visual slam
by
Takuya Minagawa
PPTX
3Dマップを活用したVisual Localization
by
Hajime Taira
PDF
論文紹介 LexToMap: lexical-based topological mapping
by
Akira Taniguchi
PDF
Open3DでSLAM入門 PyCon Kyushu 2018
by
Satoshi Fujimoto
PDF
The history of SLAM (Simultaneous Localization And Mapping)
by
EndoYuuki
PPTX
Robot frontier lesson3 2018
by
Ryuichi Ueda
PPTX
[DL輪読会]Differentiable Mapping Networks: Learning Structured Map Representatio...
by
Deep Learning JP
CNN-SLAMざっくり
by
EndoYuuki
20190307 visualslam summary
by
Takuya Minagawa
GN-Net: The Gauss-Newton Loss for Deep Direct SLAMの解説
by
Masaya Kaneko
ICCV2019読み会「Learning Meshes for Dense Visual SLAM」
by
Sho Kagami
SLAM勉強会(3) LSD-SLAM
by
Iwami Kazuya
Cartographer と Autoware を用いた自律走行
by
Yoshitaka HARA
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
Visual slam
by
Takuya Minagawa
3Dマップを活用したVisual Localization
by
Hajime Taira
論文紹介 LexToMap: lexical-based topological mapping
by
Akira Taniguchi
Open3DでSLAM入門 PyCon Kyushu 2018
by
Satoshi Fujimoto
The history of SLAM (Simultaneous Localization And Mapping)
by
EndoYuuki
Robot frontier lesson3 2018
by
Ryuichi Ueda
[DL輪読会]Differentiable Mapping Networks: Learning Structured Map Representatio...
by
Deep Learning JP
More from Masaya Kaneko
PPTX
Direct Sparse Odometryの解説
by
Masaya Kaneko
PPTX
ORB-SLAMの手法解説
by
Masaya Kaneko
PDF
論文読み会(DeMoN;CVPR2017)
by
Masaya Kaneko
PDF
Unsupervised Collaborative Learning of Keyframe Detection and Visual Odometry...
by
Masaya Kaneko
PPTX
論文読み会@AIST (Deep Virtual Stereo Odometry [ECCV2018])
by
Masaya Kaneko
PDF
コンピュータ先端ガイド2巻3章勉強会(SVM)
by
Masaya Kaneko
PPTX
Dynamic Routing Between Capsules
by
Masaya Kaneko
Direct Sparse Odometryの解説
by
Masaya Kaneko
ORB-SLAMの手法解説
by
Masaya Kaneko
論文読み会(DeMoN;CVPR2017)
by
Masaya Kaneko
Unsupervised Collaborative Learning of Keyframe Detection and Visual Odometry...
by
Masaya Kaneko
論文読み会@AIST (Deep Virtual Stereo Odometry [ECCV2018])
by
Masaya Kaneko
コンピュータ先端ガイド2巻3章勉強会(SVM)
by
Masaya Kaneko
Dynamic Routing Between Capsules
by
Masaya Kaneko
Recently uploaded
PDF
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
PDF
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
PDF
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
PDF
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
PDF
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
PPTX
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
論文読み会2018 (CodeSLAM)
1.
CodeSLAM : Learning
a Compact, Optimisable Representation for Dense Visual SLAM 2018論文読み会 2018/07/12 相澤研究室 M1 金子 真也
2.
1 Introduction • Visual SLAM
(Simultaneous Localization and Mapping) – 映像からリアルタイムにカメラの軌跡を推定 (三次元地図作成:軌跡推定の手がかり) LSD-SLAM [Engel+,2014]
3.
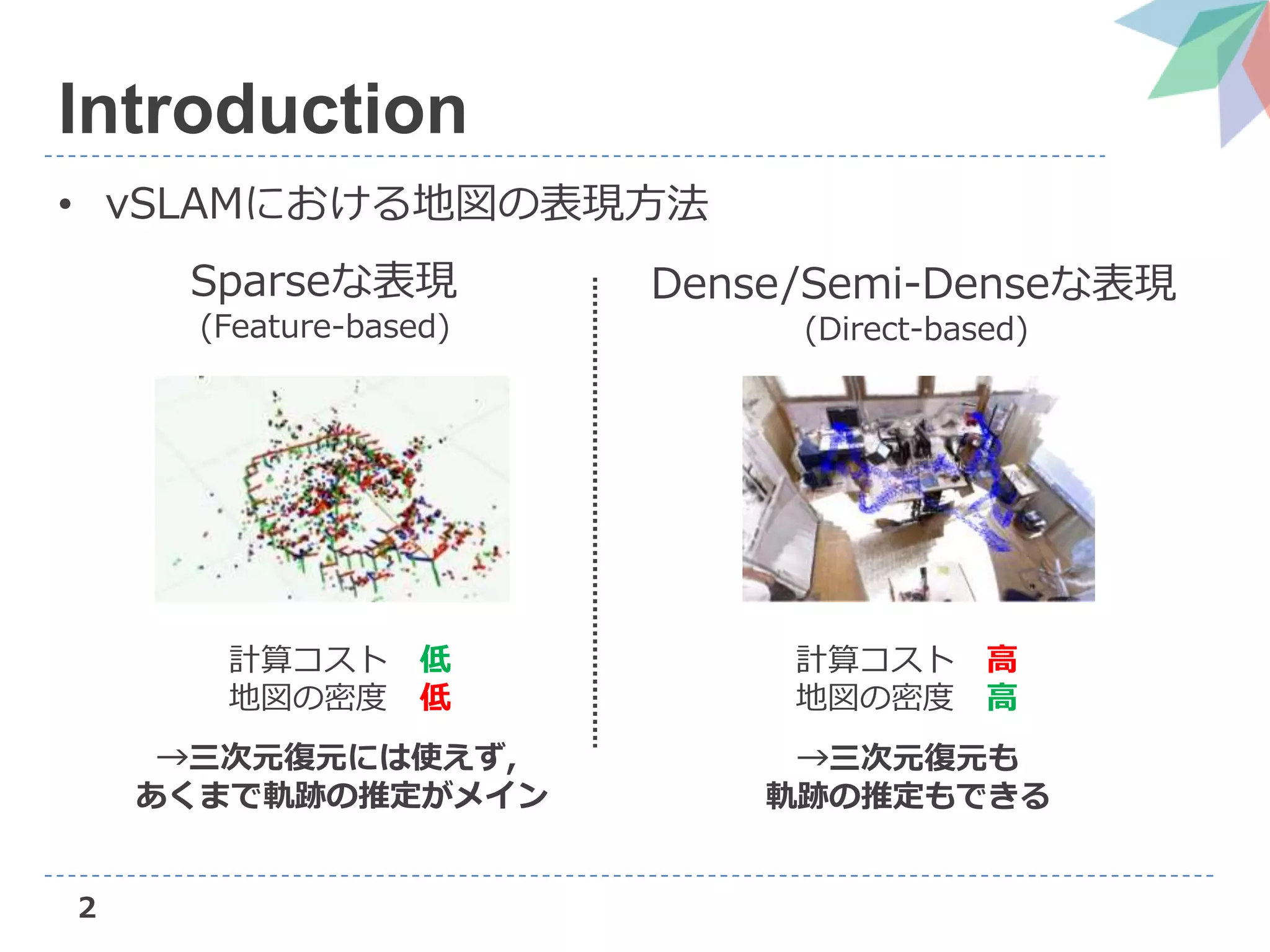
2 Introduction • vSLAMにおける地図の表現方法 Sparseな表現 (Feature-based) Dense/Semi-Denseな表現 (Direct-based) 計算コスト 低 地図の密度
低 計算コスト 高 地図の密度 高 →三次元復元には使えず, あくまで軌跡の推定がメイン →三次元復元も 軌跡の推定もできる
4.
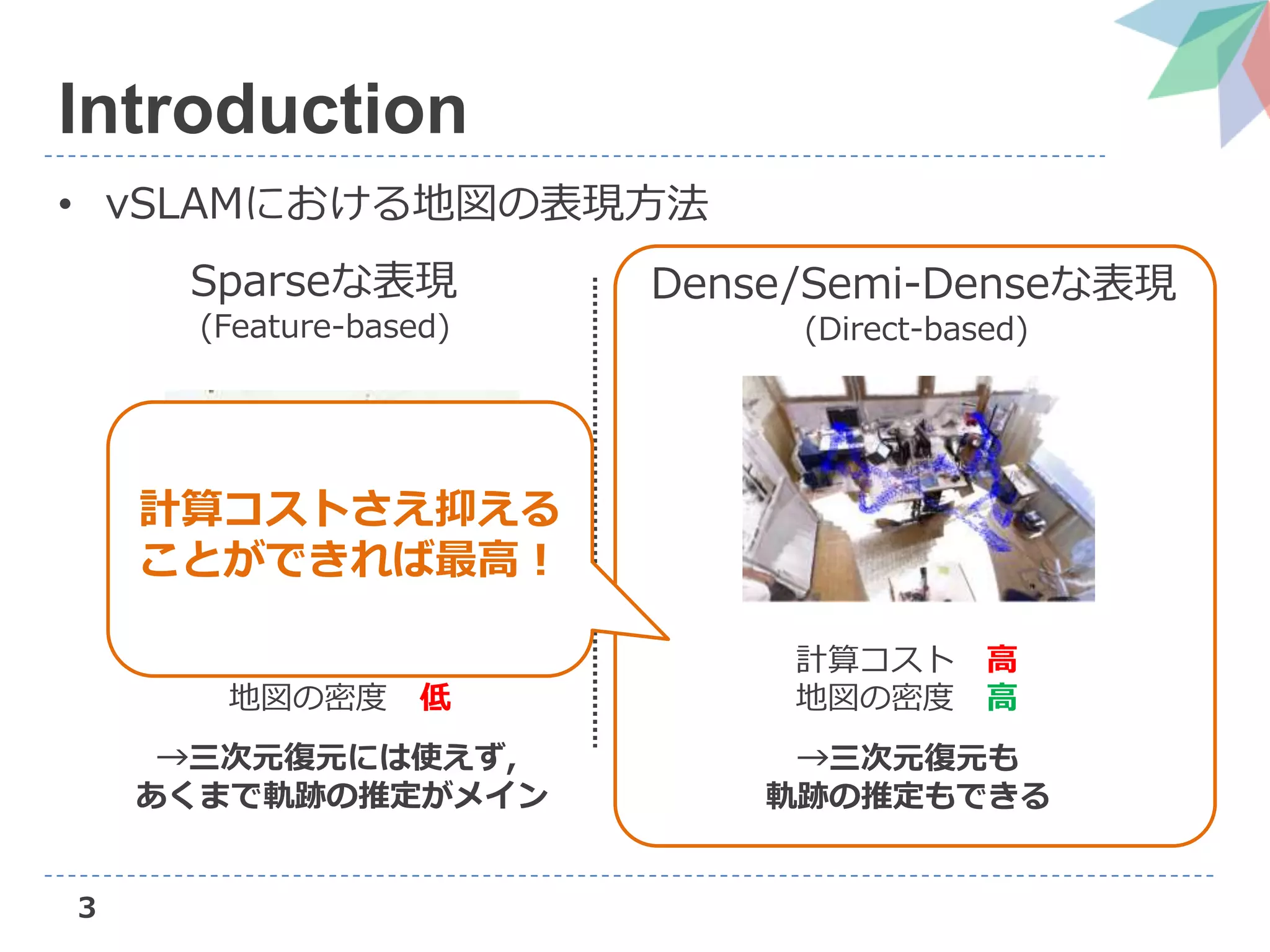
3 Introduction • vSLAMにおける地図の表現方法 計算コスト 低 地図の密度
低 →三次元復元には使えず, あくまで軌跡の推定がメイン →三次元復元も 軌跡の推定もできる 計算コストさえ抑える ことができれば最高! Sparseな表現 (Feature-based) Dense/Semi-Denseな表現 (Direct-based) 計算コスト 高 地図の密度 高
5.
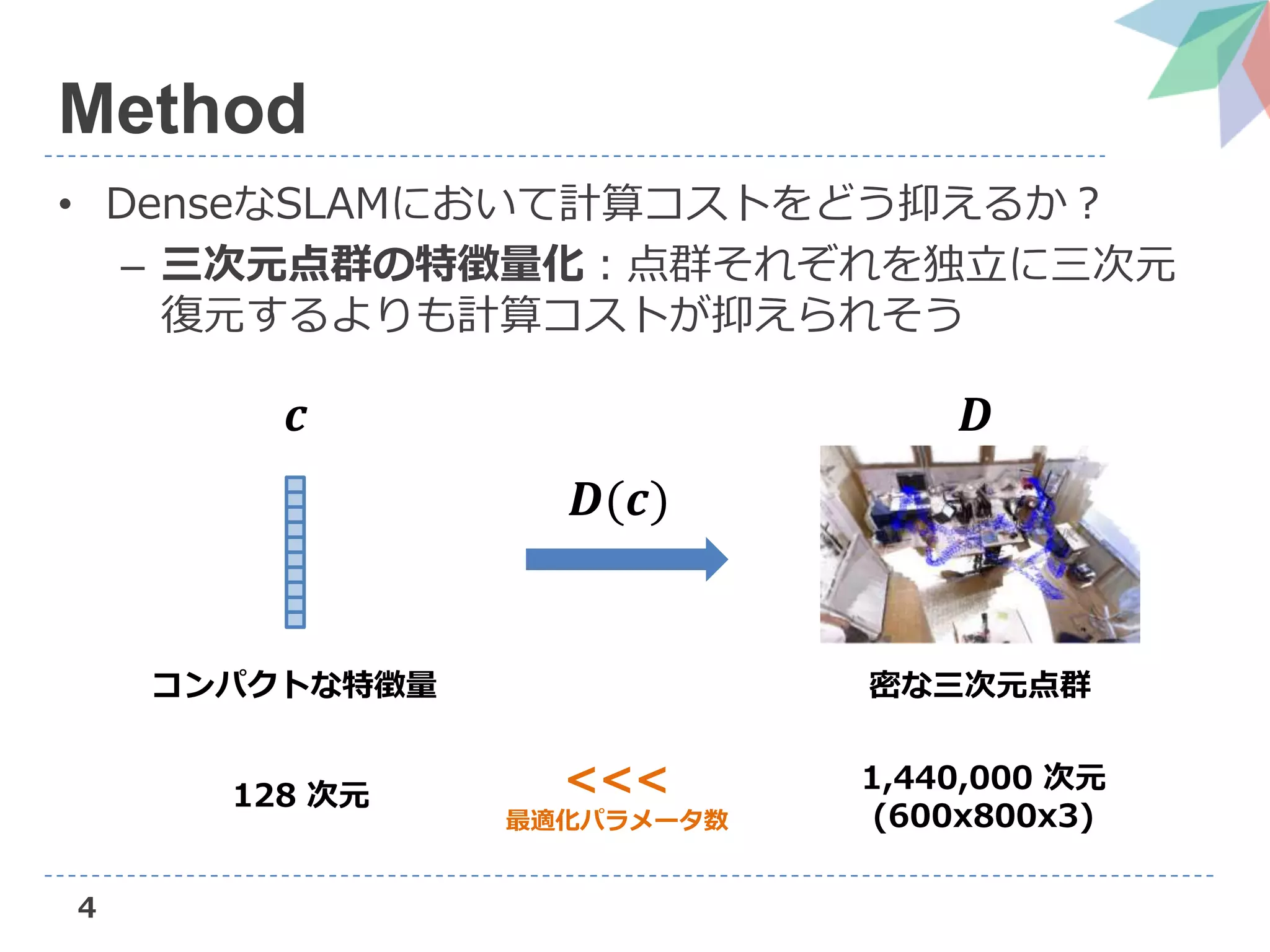
4 Method • DenseなSLAMにおいて計算コストをどう抑えるか? – 三次元点群の特徴量化:点群それぞれを独立に三次元 復元するよりも計算コストが抑えられそう <<< 最適化パラメータ数 コンパクトな特徴量
密な三次元点群 𝒄 𝑫(𝒄) 𝑫 1,440,000 次元 (600x800x3) 128 次元
6.
5 Method • Naïveな手法 – Variational
Auto-Encoderで中間特徴量を抽出 [参考 : Variational Auto-Encoder] 𝑧~𝒩(0,1) input output 中間特徴量 (ガウス分布のパラメータ) 特徴量空間をいじれば出力も変化
7.
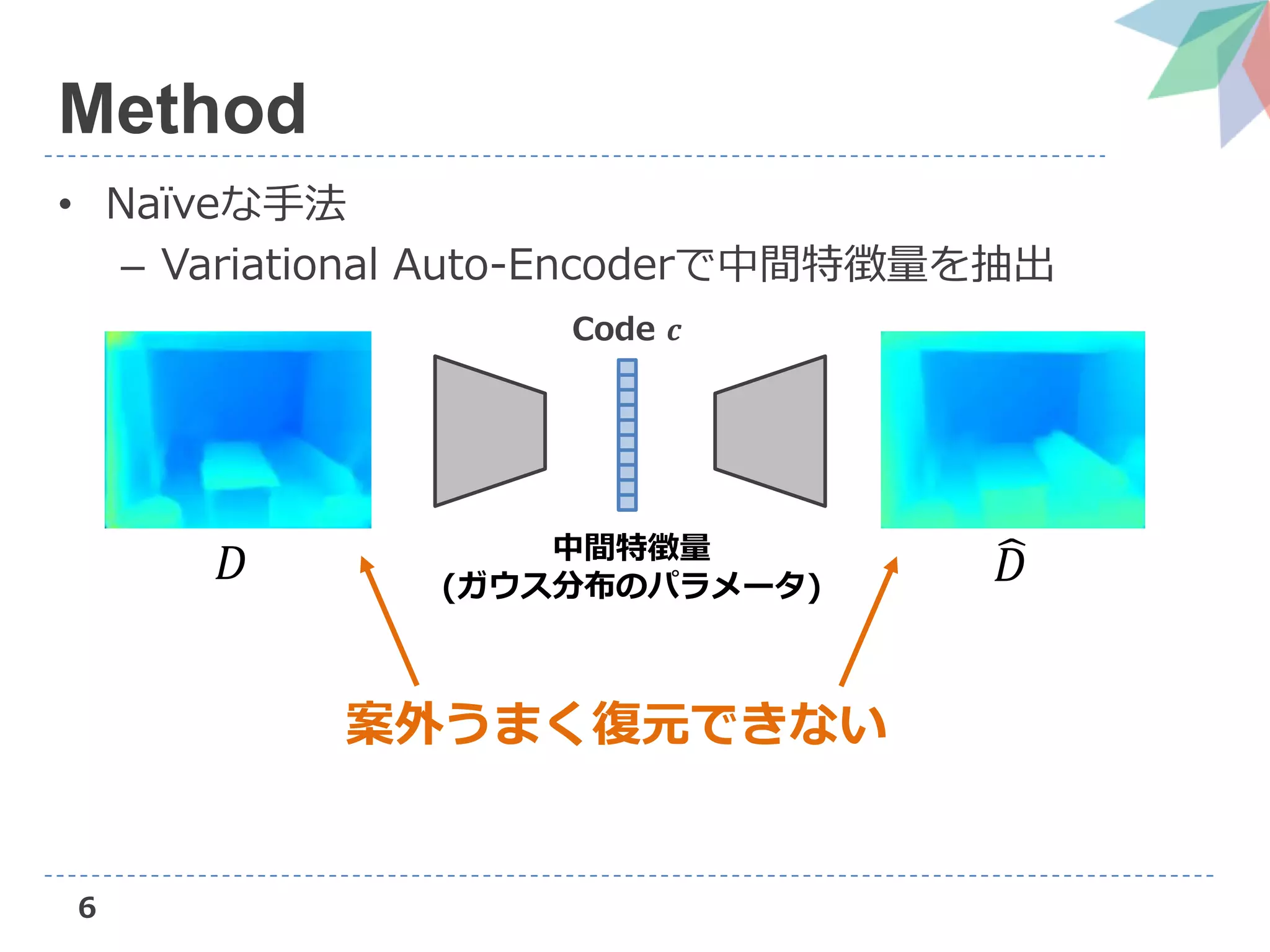
6 Method • Naïveな手法 – Variational
Auto-Encoderで中間特徴量を抽出 中間特徴量 (ガウス分布のパラメータ) 案外うまく復元できない 𝐷 𝐷 Code 𝒄
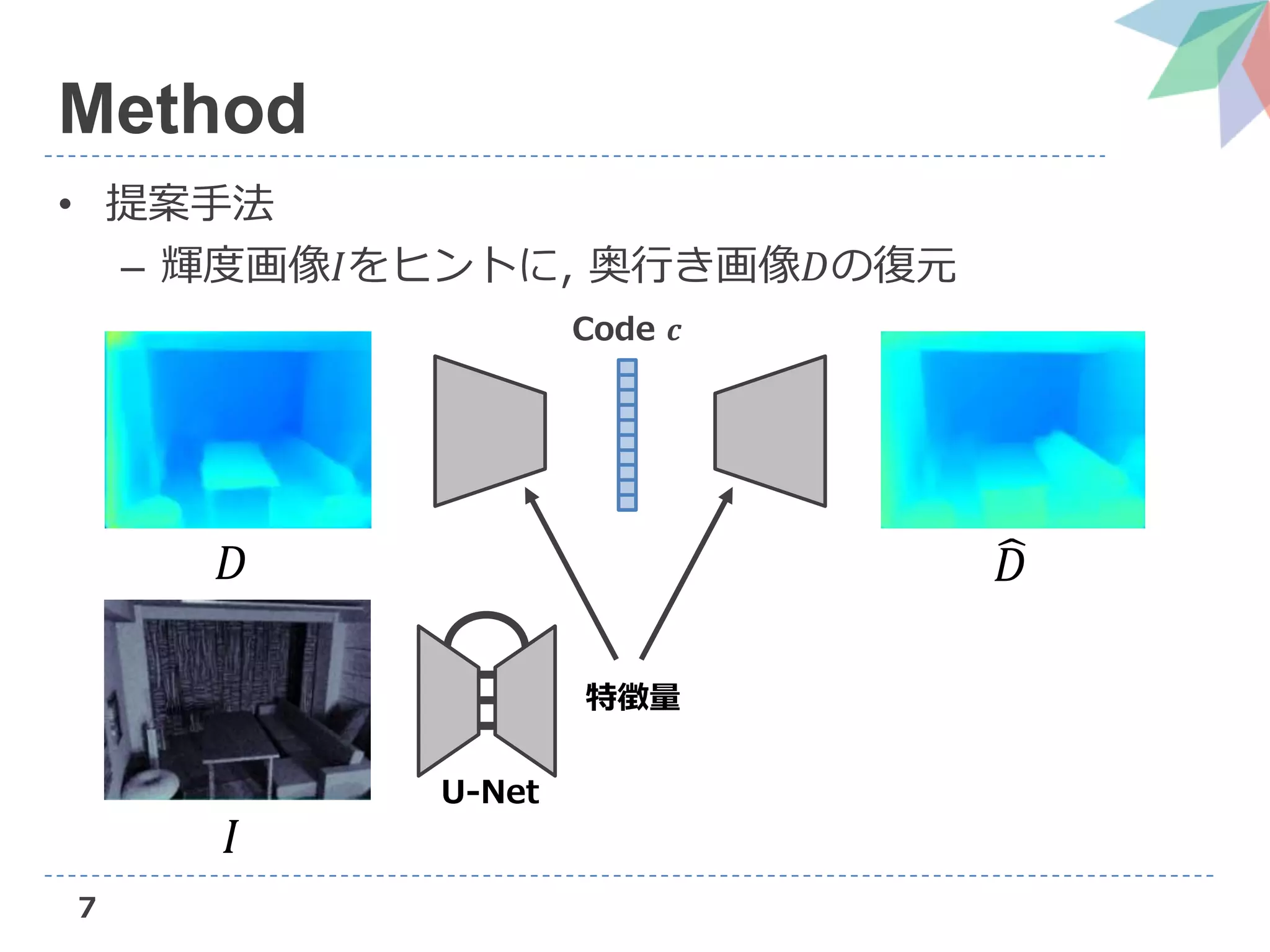
8.
7 Method • 提案手法 – 輝度画像𝐼をヒントに,
奥行き画像𝐷の復元 特徴量 𝐷 𝐷 𝐼 Code 𝒄 U-Net
9.
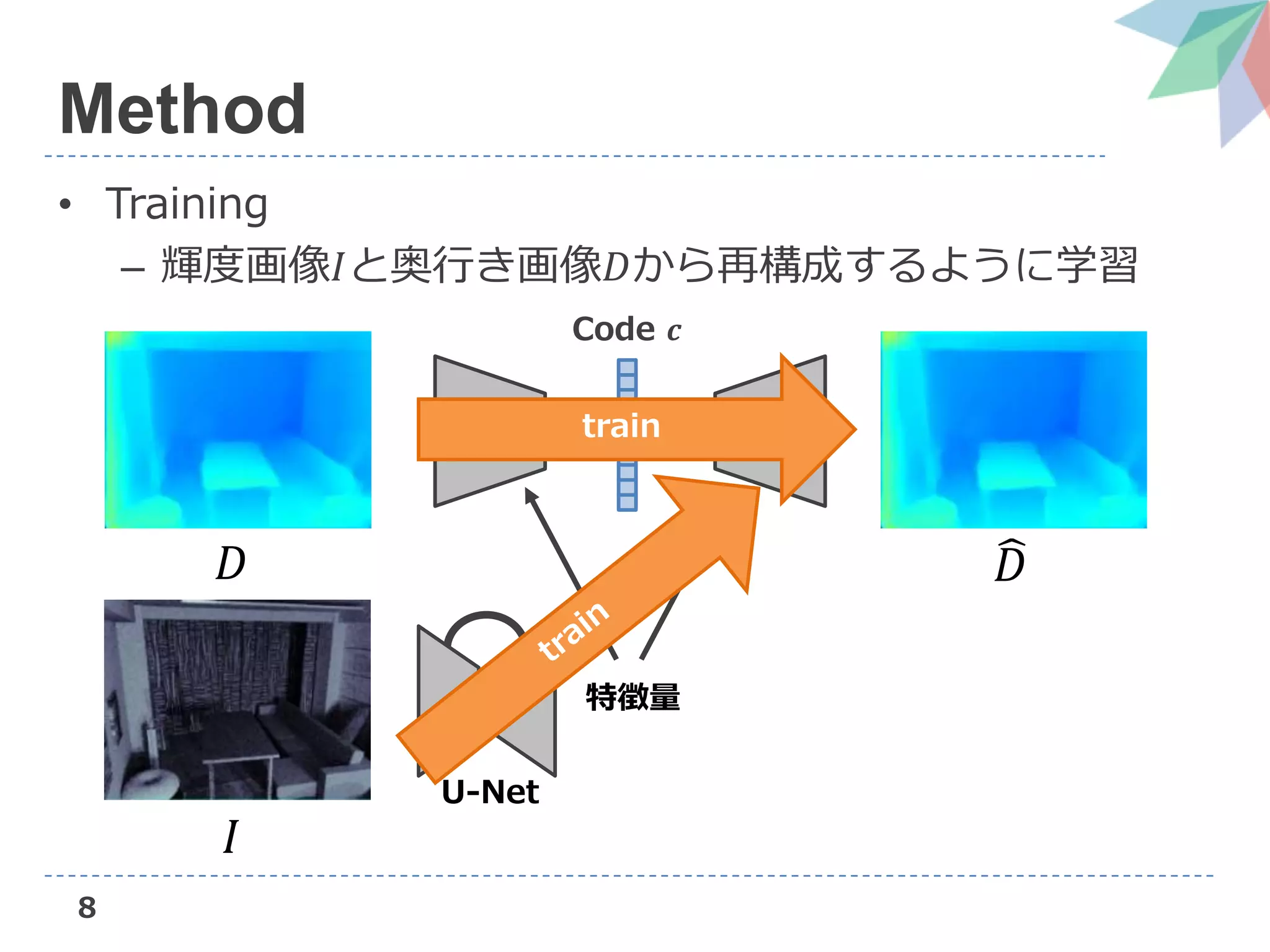
8 Method • Training – 輝度画像𝐼と奥行き画像𝐷から再構成するように学習 特徴量 𝐷
𝐷 𝐼 Code 𝒄 train U-Net
10.
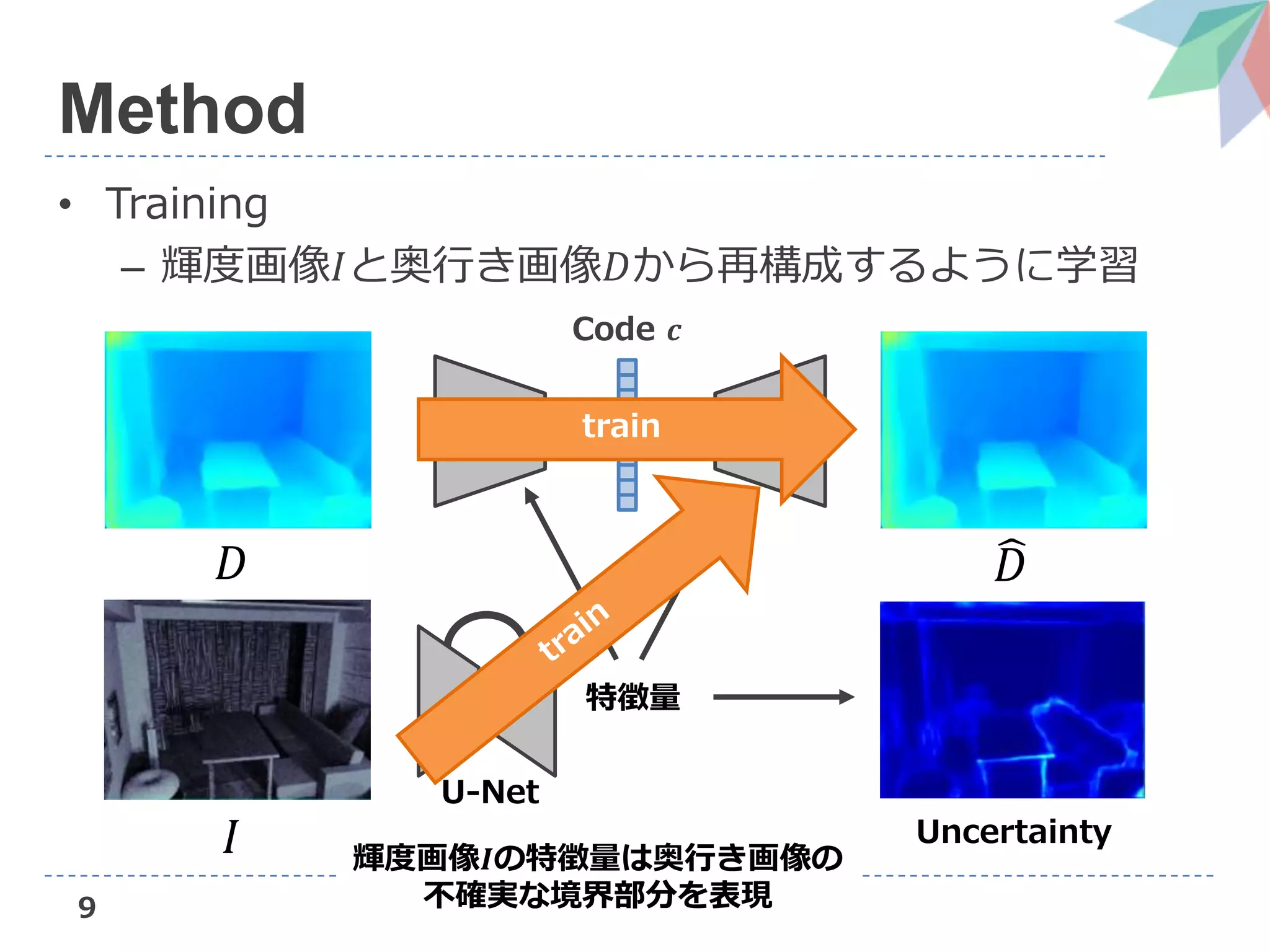
9 Method • Training – 輝度画像𝐼と奥行き画像𝐷から再構成するように学習 特徴量 𝐷
𝐷 𝐼 Uncertainty 輝度画像𝑰の特徴量は奥行き画像の 不確実な境界部分を表現 Code 𝒄 train U-Net
11.
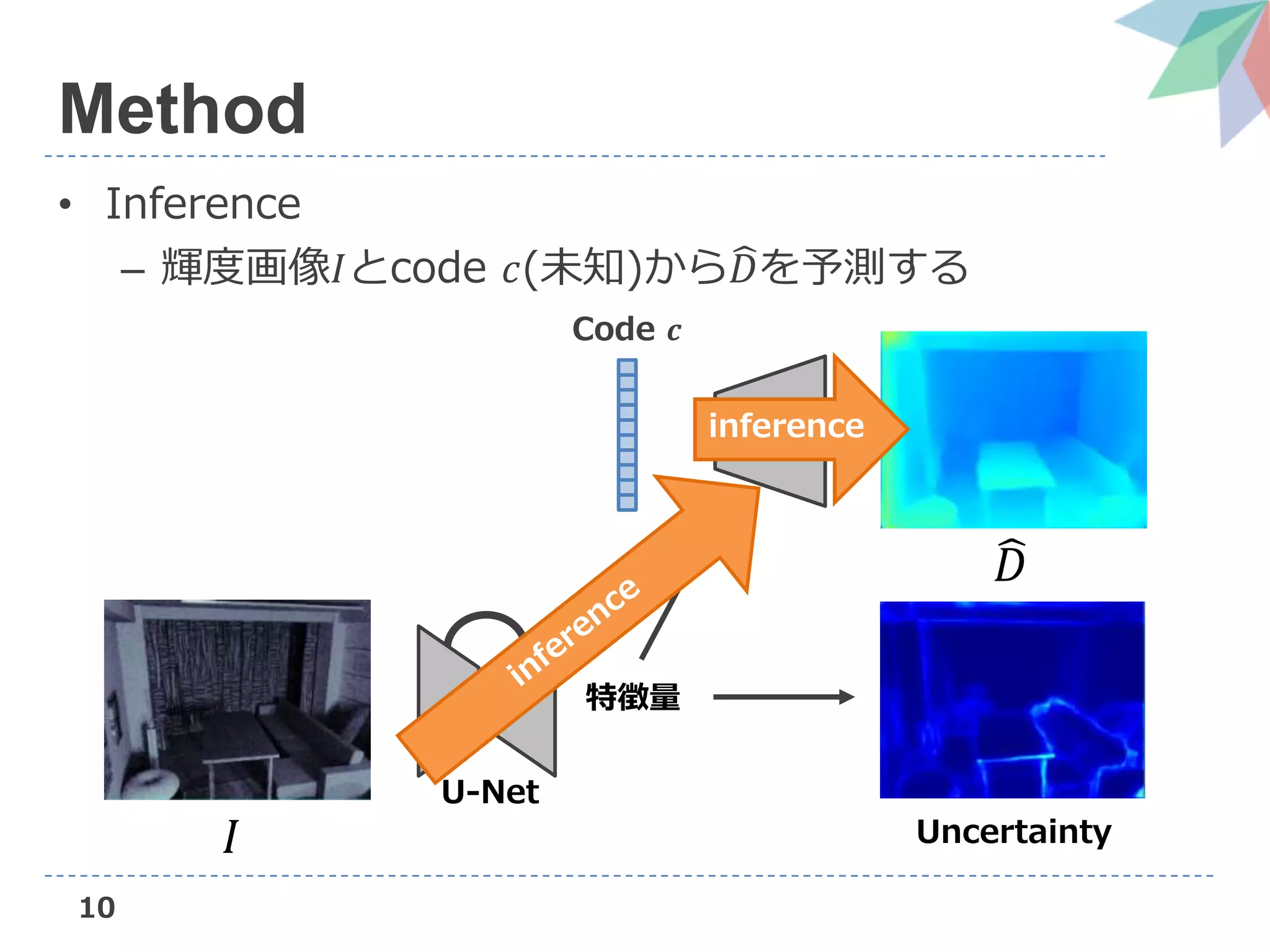
10 Method • Inference – 輝度画像𝐼とcode
𝑐(未知)から 𝐷を予測する 特徴量 𝐷 𝐼 Uncertainty inference Code 𝒄 U-Net
12.
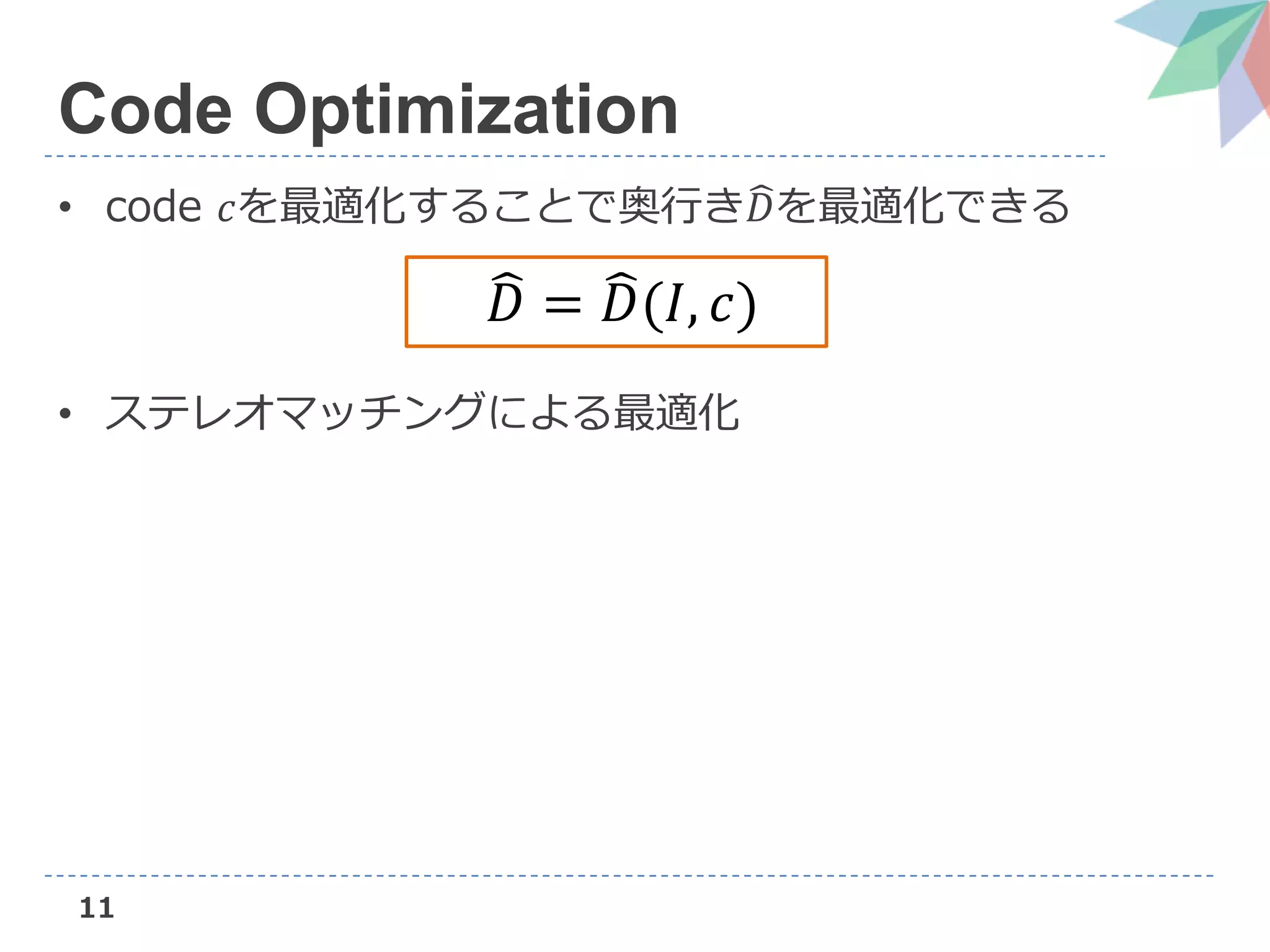
11 Code Optimization • code
𝑐を最適化することで奥行き 𝐷を最適化できる • ステレオマッチングによる最適化 𝐷 = 𝐷(𝐼, 𝑐)
13.
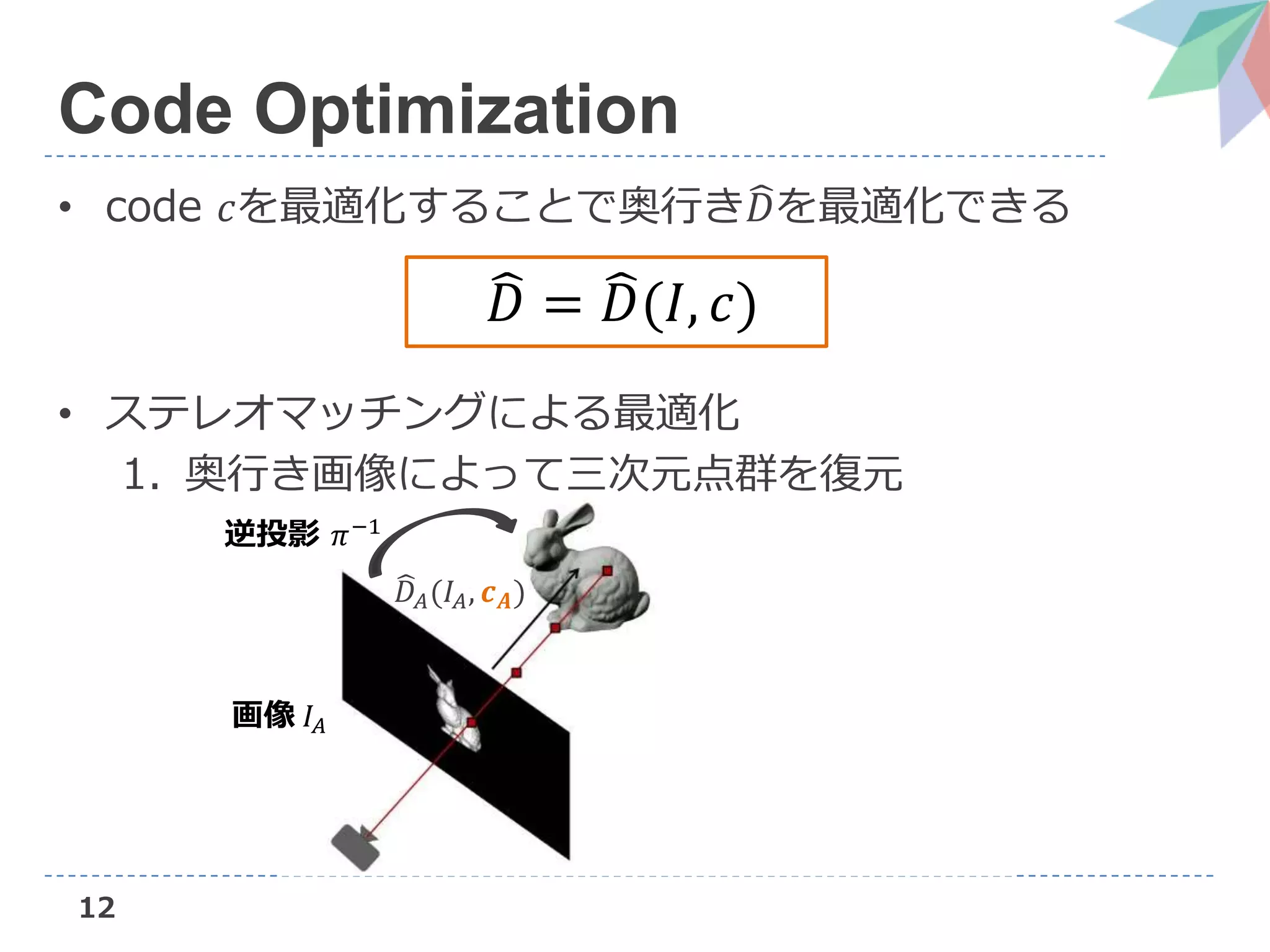
12 Code Optimization • code
𝑐を最適化することで奥行き 𝐷を最適化できる • ステレオマッチングによる最適化 1. 奥行き画像によって三次元点群を復元 𝐷 = 𝐷(𝐼, 𝑐) 画像 𝐼𝐴 逆投影 𝜋−1 𝐷𝐴(𝐼𝐴, 𝒄 𝑨)
14.
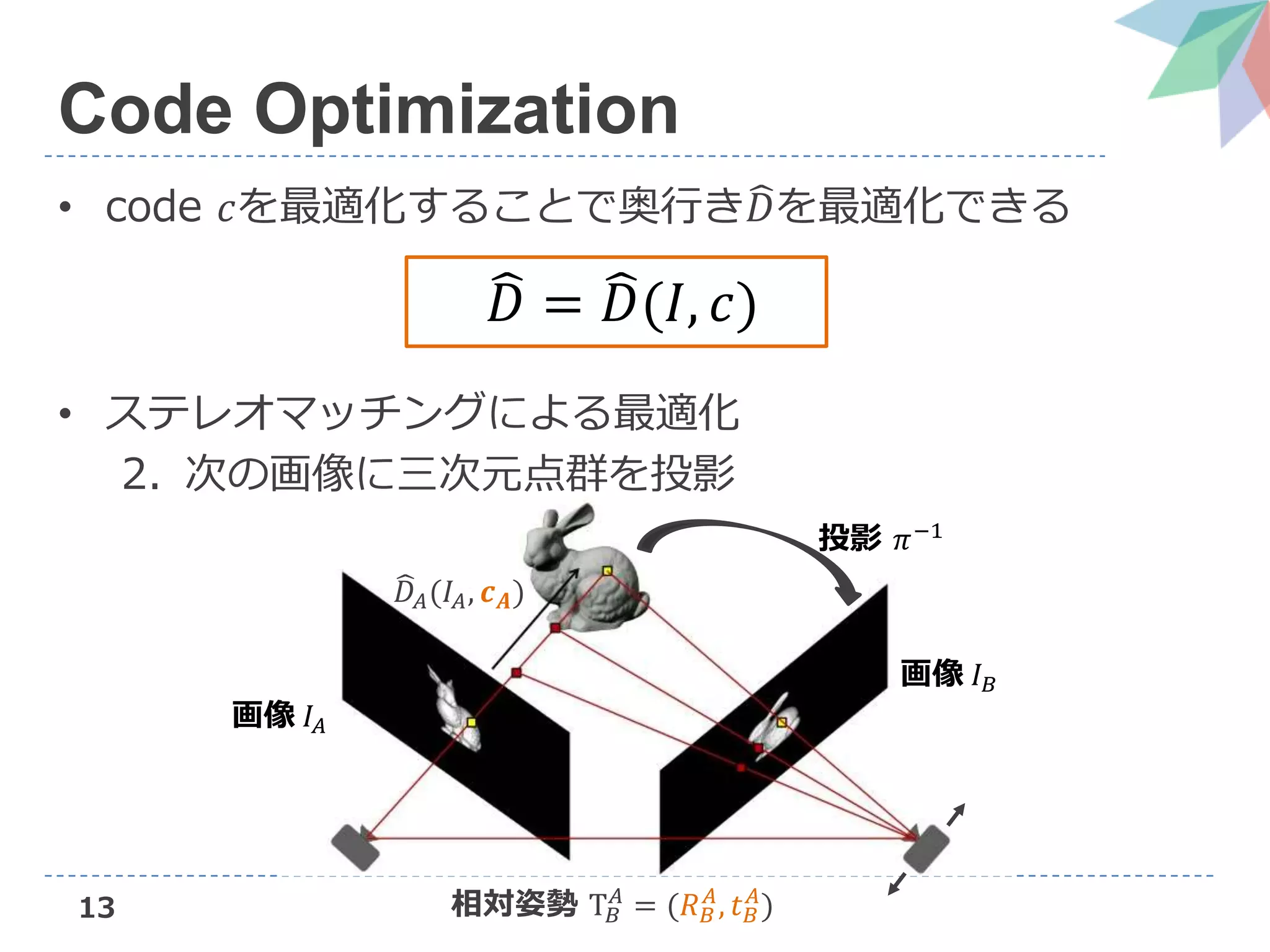
13 Code Optimization • code
𝑐を最適化することで奥行き 𝐷を最適化できる • ステレオマッチングによる最適化 2. 次の画像に三次元点群を投影 𝐷 = 𝐷(𝐼, 𝑐) 相対姿勢 T 𝐵 𝐴 = (𝑅 𝐵 𝐴 , 𝑡 𝐵 𝐴 ) 画像 𝐼𝐴 画像 𝐼 𝐵 投影 𝜋−1 𝐷𝐴(𝐼𝐴, 𝒄 𝑨)
15.
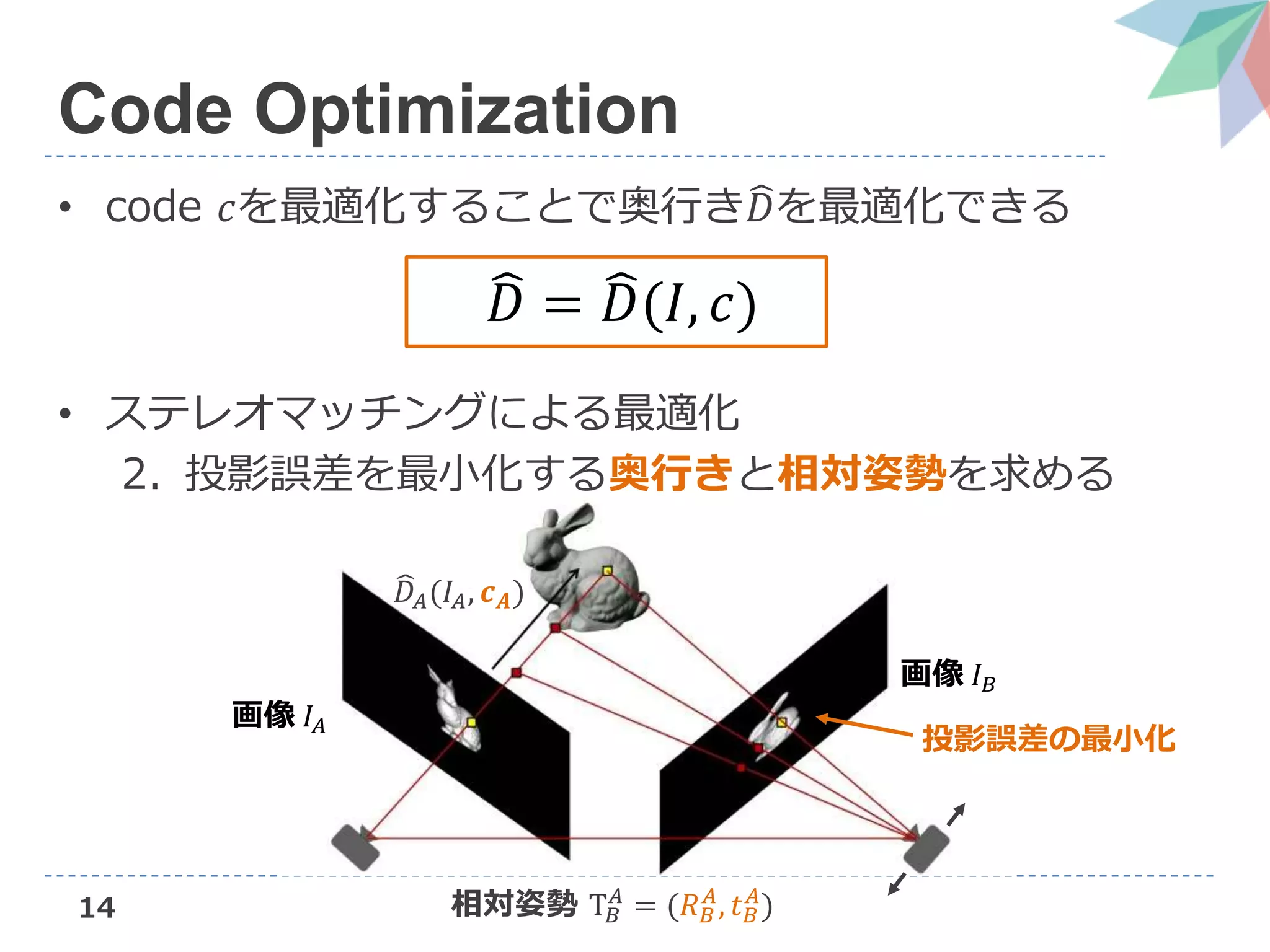
14 Code Optimization • code
𝑐を最適化することで奥行き 𝐷を最適化できる • ステレオマッチングによる最適化 2. 投影誤差を最小化する奥行きと相対姿勢を求める 𝐷 = 𝐷(𝐼, 𝑐) 相対姿勢 T 𝐵 𝐴 = (𝑅 𝐵 𝐴 , 𝑡 𝐵 𝐴 ) 投影誤差の最小化 画像 𝐼𝐴 画像 𝐼 𝐵 𝐷𝐴(𝐼𝐴, 𝒄 𝑨)
16.
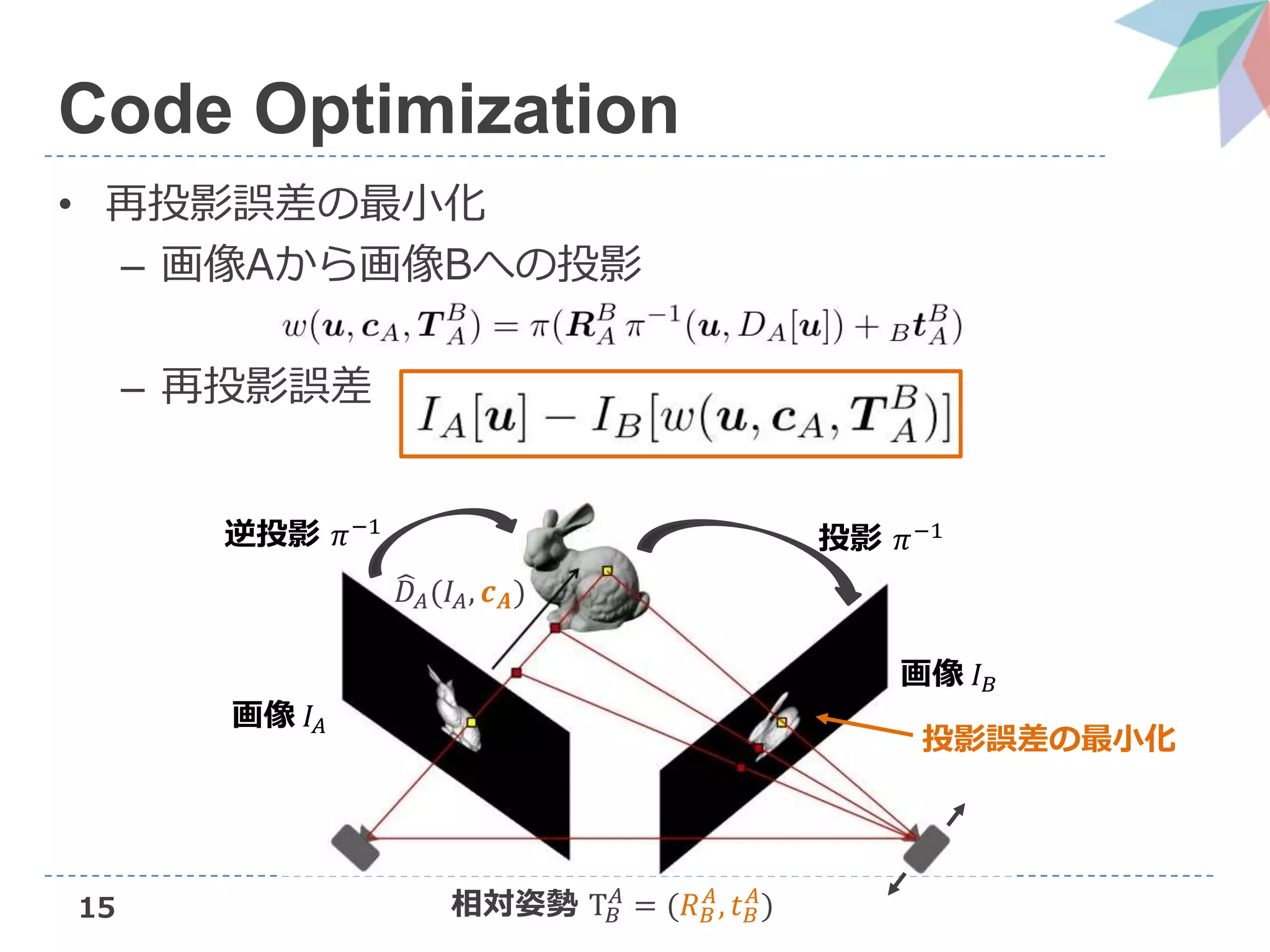
15 Code Optimization • 再投影誤差の最小化 –
画像Aから画像Bへの投影 – 再投影誤差 画像 𝐼𝐴 画像 𝐼 𝐵 投影誤差の最小化 逆投影 𝜋−1 投影 𝜋−1 𝐷𝐴(𝐼𝐴, 𝒄 𝑨) 相対姿勢 T 𝐵 𝐴 = (𝑅 𝐵 𝐴 , 𝑡 𝐵 𝐴 )
17.
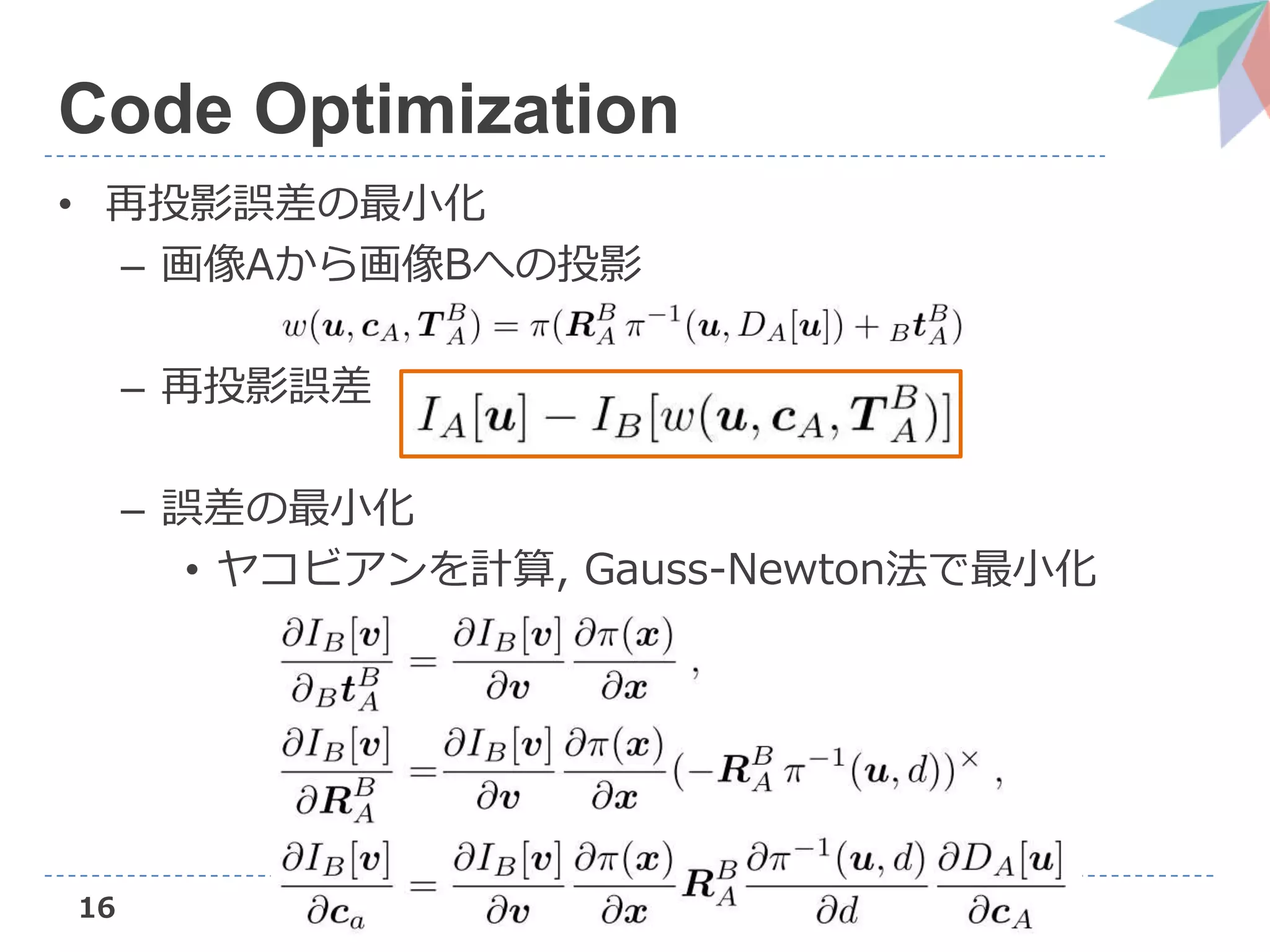
16 Code Optimization • 再投影誤差の最小化 –
画像Aから画像Bへの投影 – 再投影誤差 – 誤差の最小化 • ヤコビアンを計算, Gauss-Newton法で最小化
18.
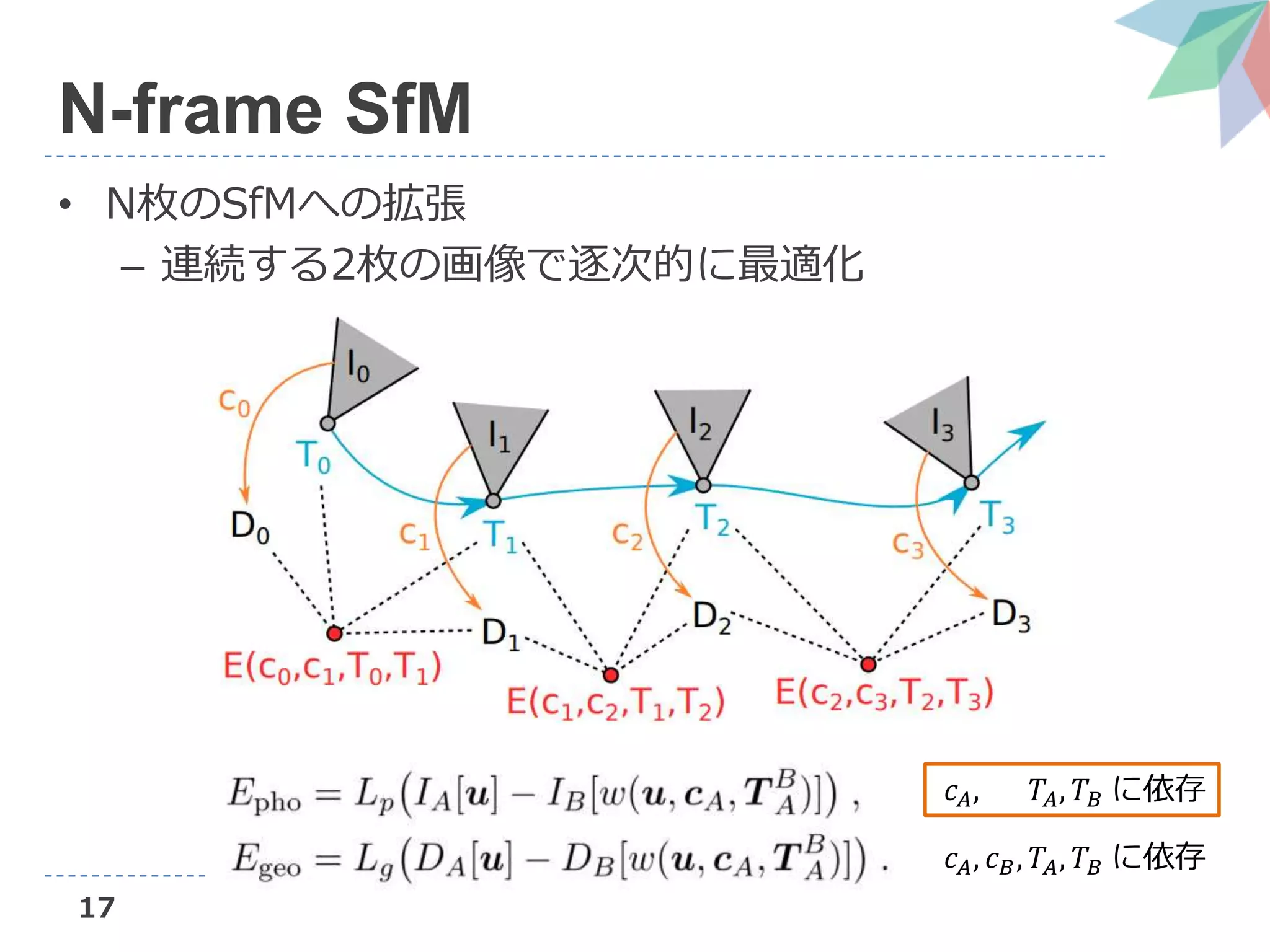
17 N-frame SfM • N枚のSfMへの拡張 –
連続する2枚の画像で逐次的に最適化 𝑐 𝐴, 𝑐 𝐵, 𝑇𝐴, 𝑇𝐵 に依存 𝑐 𝐴, 𝑐 𝐵, 𝑇𝐴, 𝑇𝐵 に依存
19.
18 Dataset • SceneNet RGB-D
[J.McCormac+, ICCV17] – 屋内のCGデータセット Image Depth Instance seg Semantic seg Optical Flow
20.
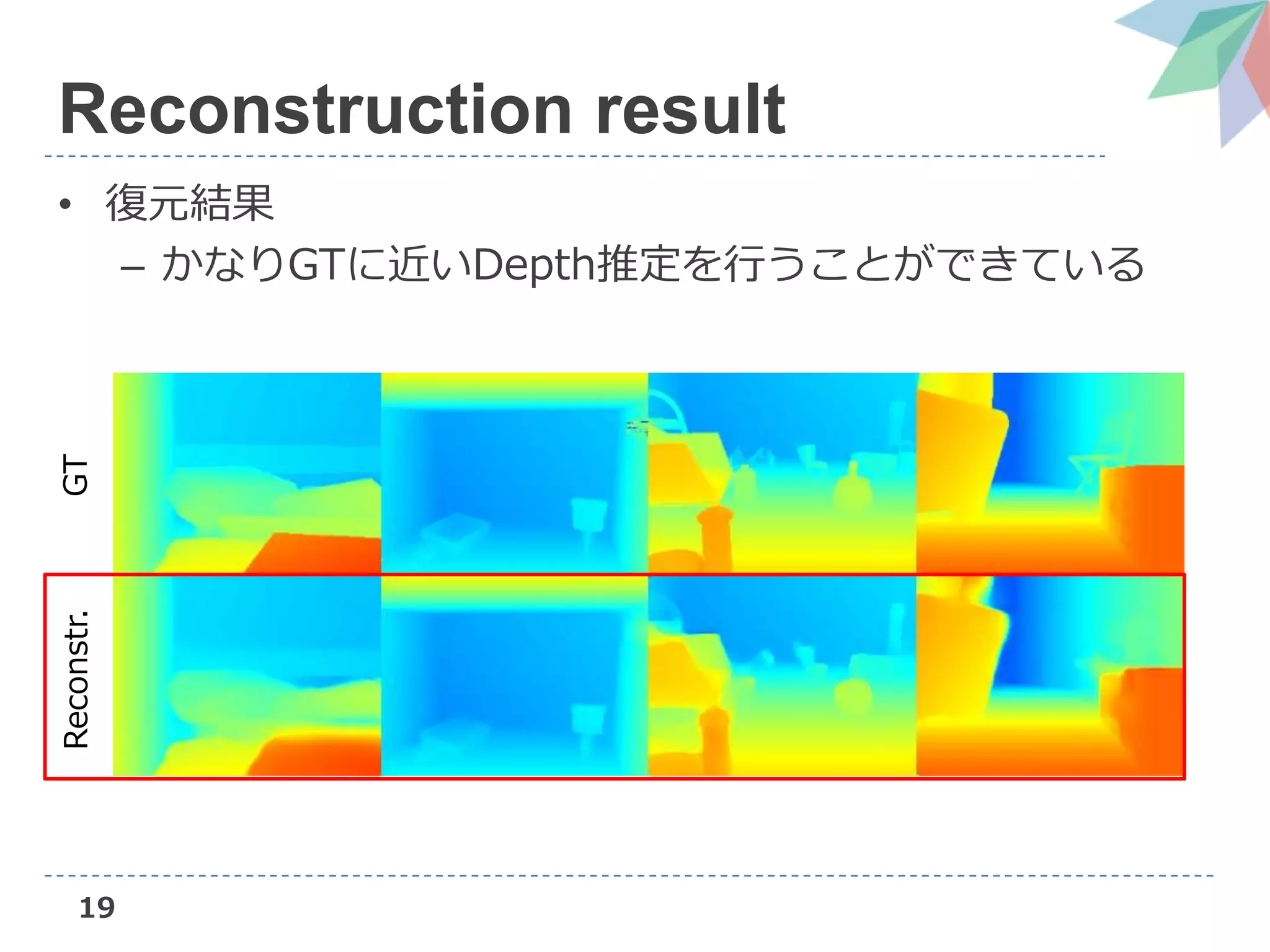
19 Reconstruction result • 復元結果 –
かなりGTに近いDepth推定を行うことができている GTReconstr.
21.
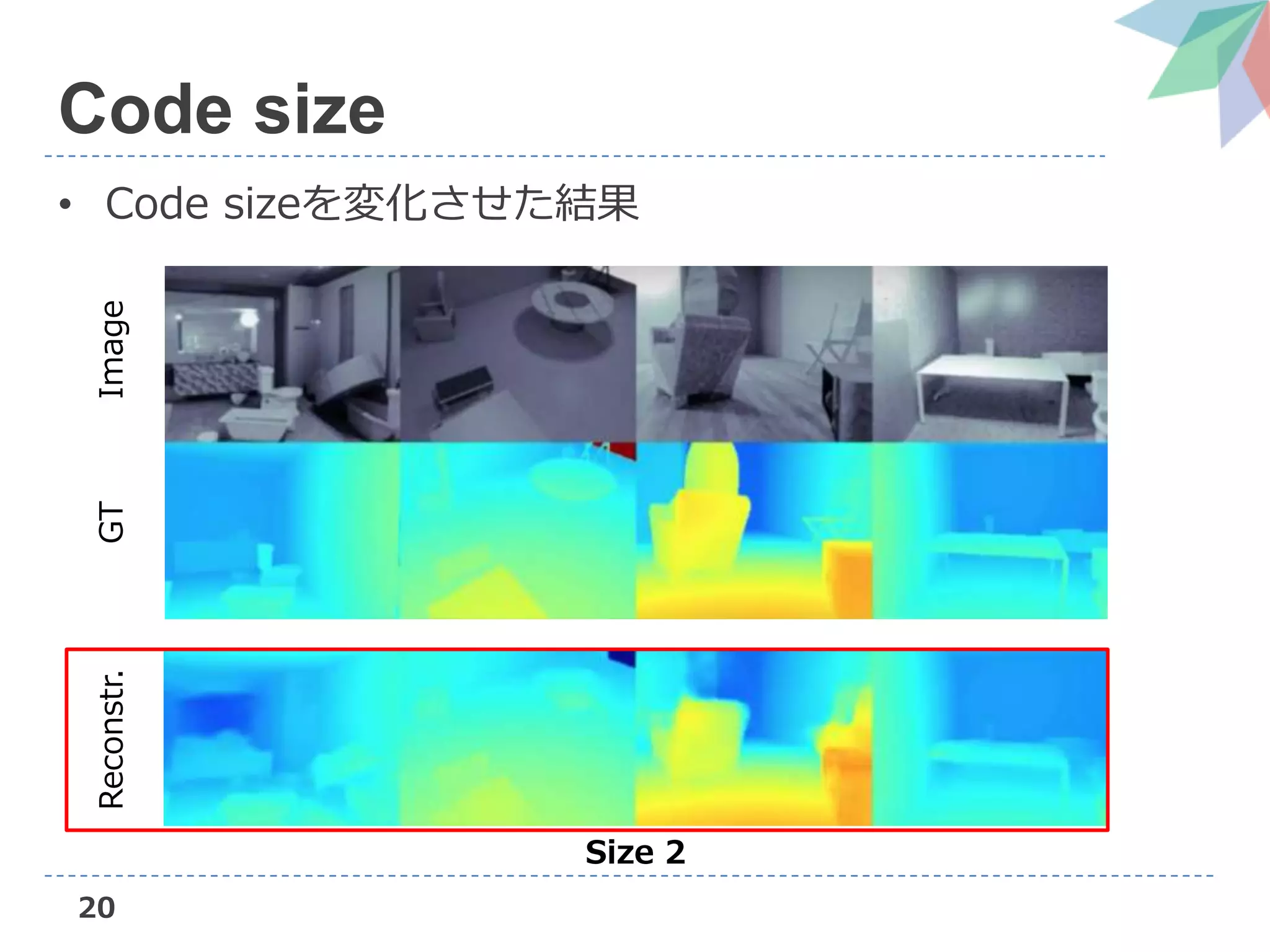
20 Code size • Code
sizeを変化させた結果 ImageGTReconstr. Size 2
22.
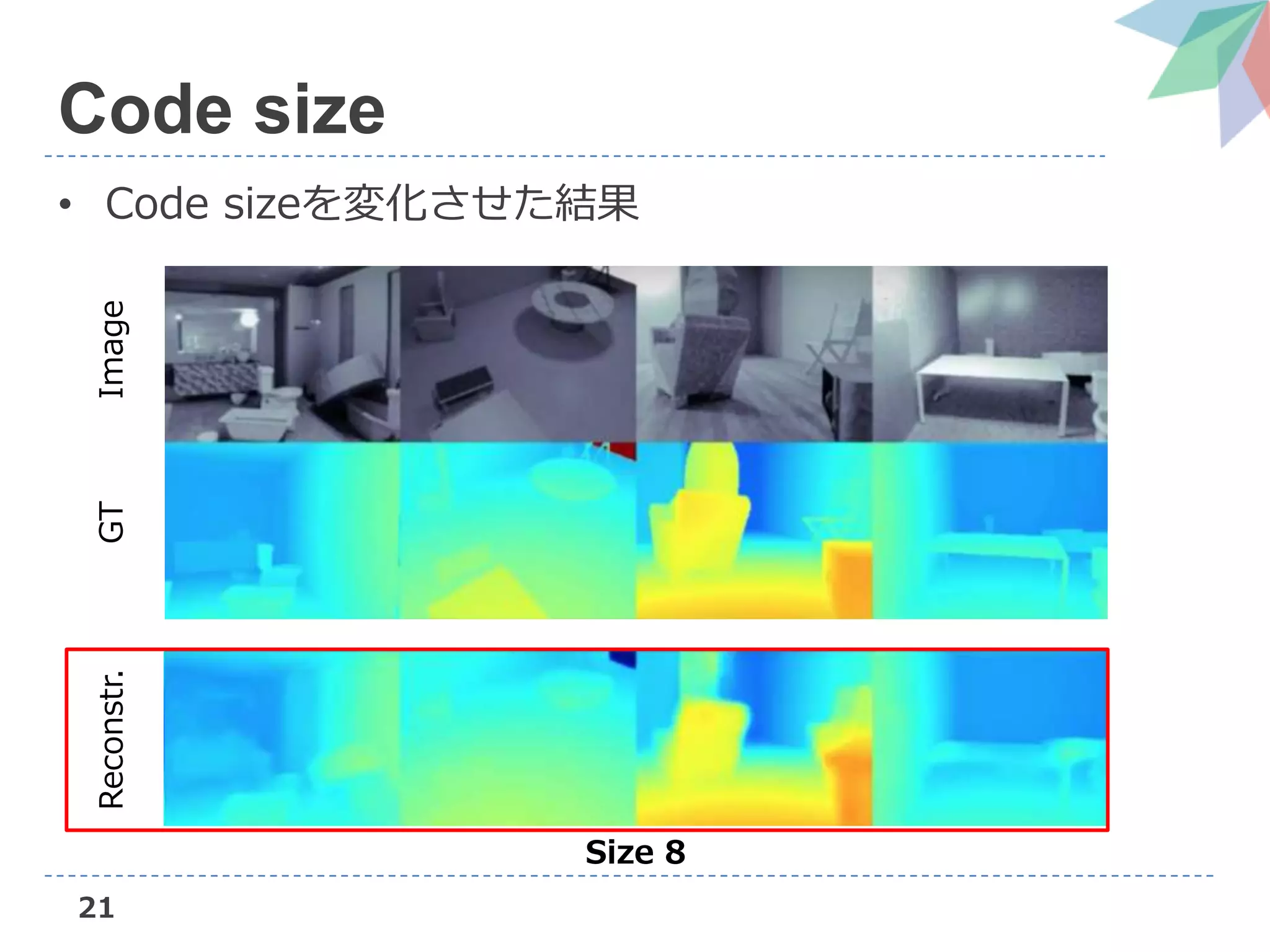
21 Code size • Code
sizeを変化させた結果 Size 8 ImageGTReconstr.
23.
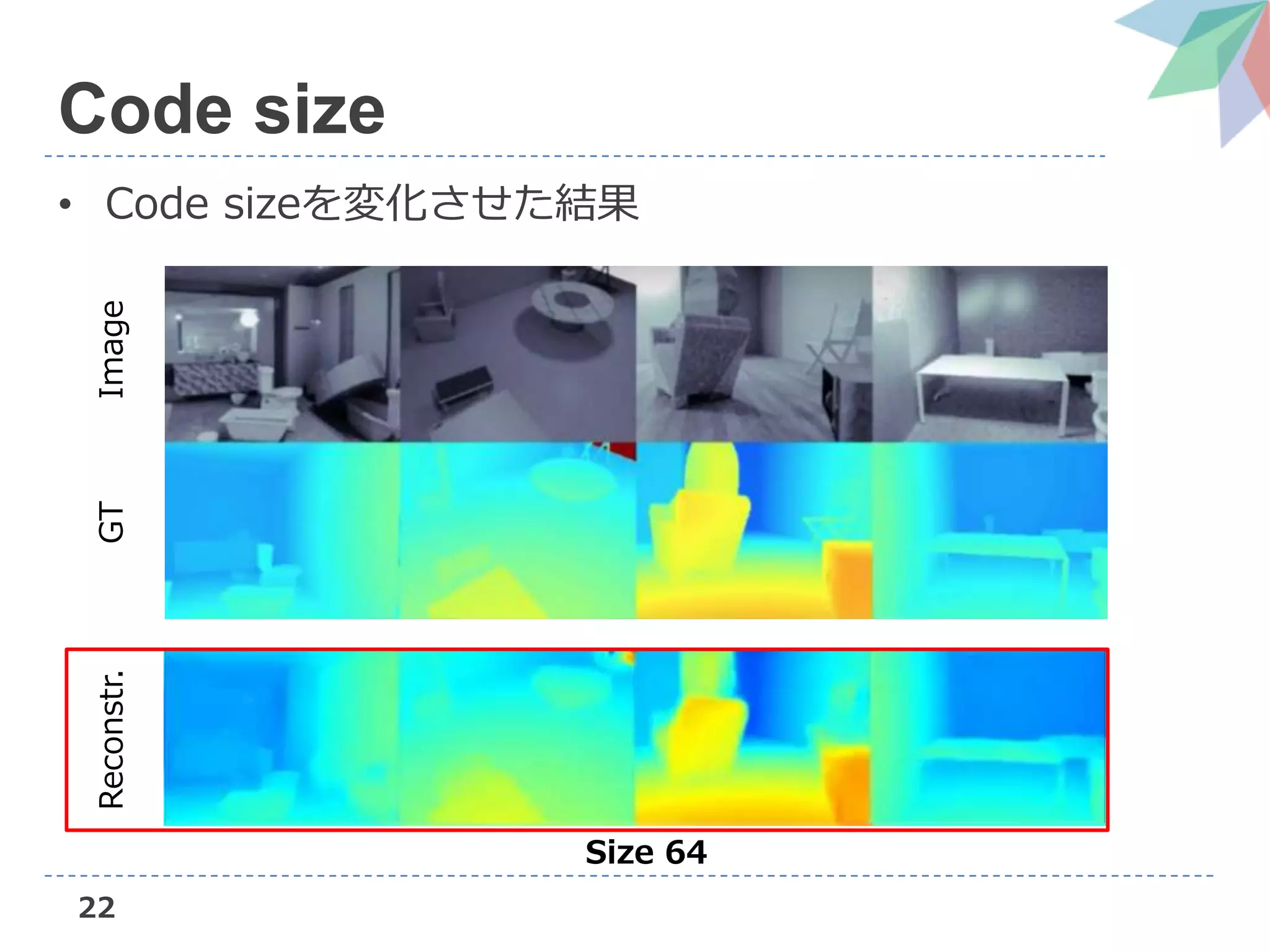
22 Code size • Code
sizeを変化させた結果 Size 64 ImageGTReconstr.
24.
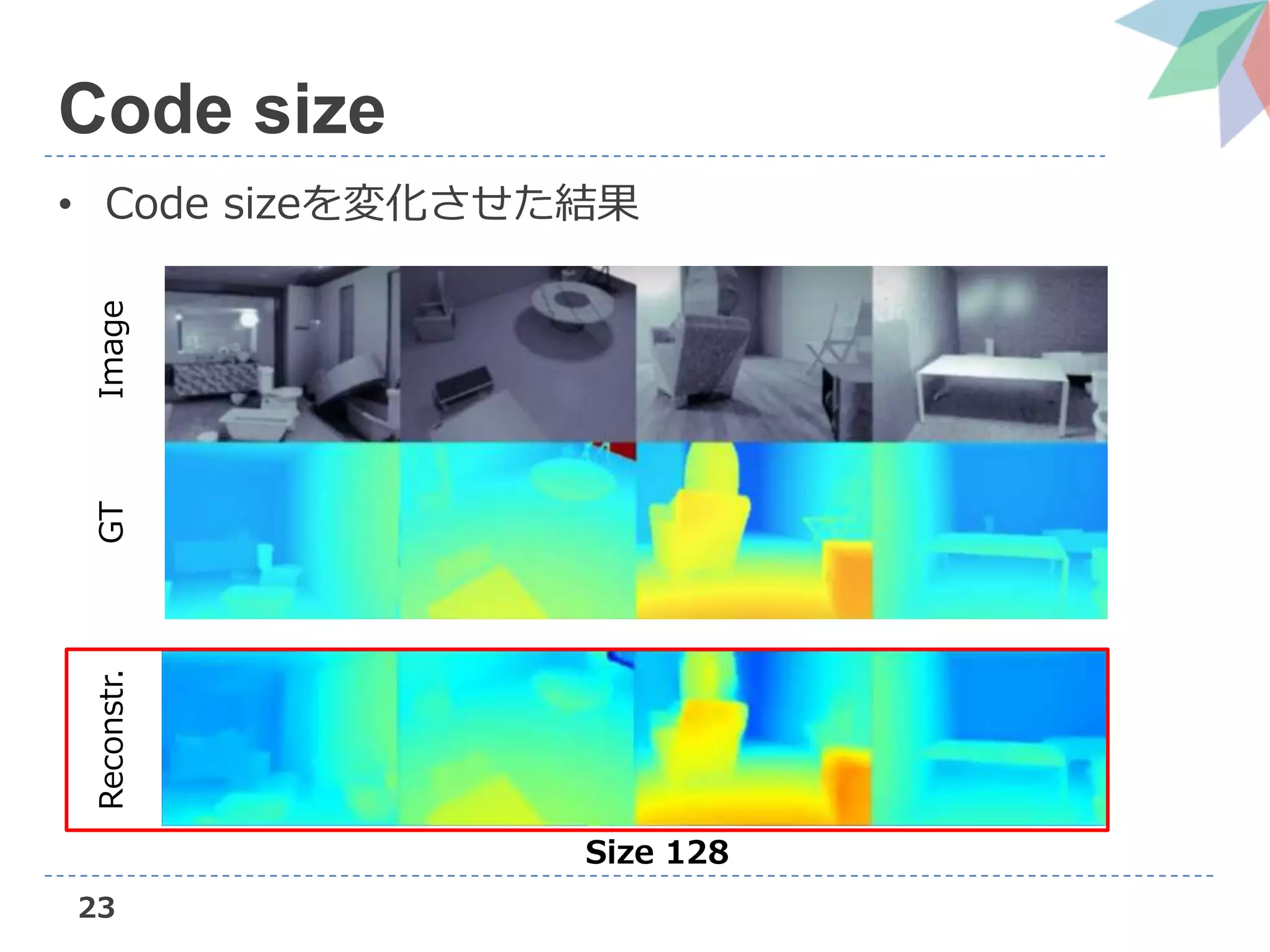
23 Code size • Code
sizeを変化させた結果 Size 128 ImageGTReconstr.
25.
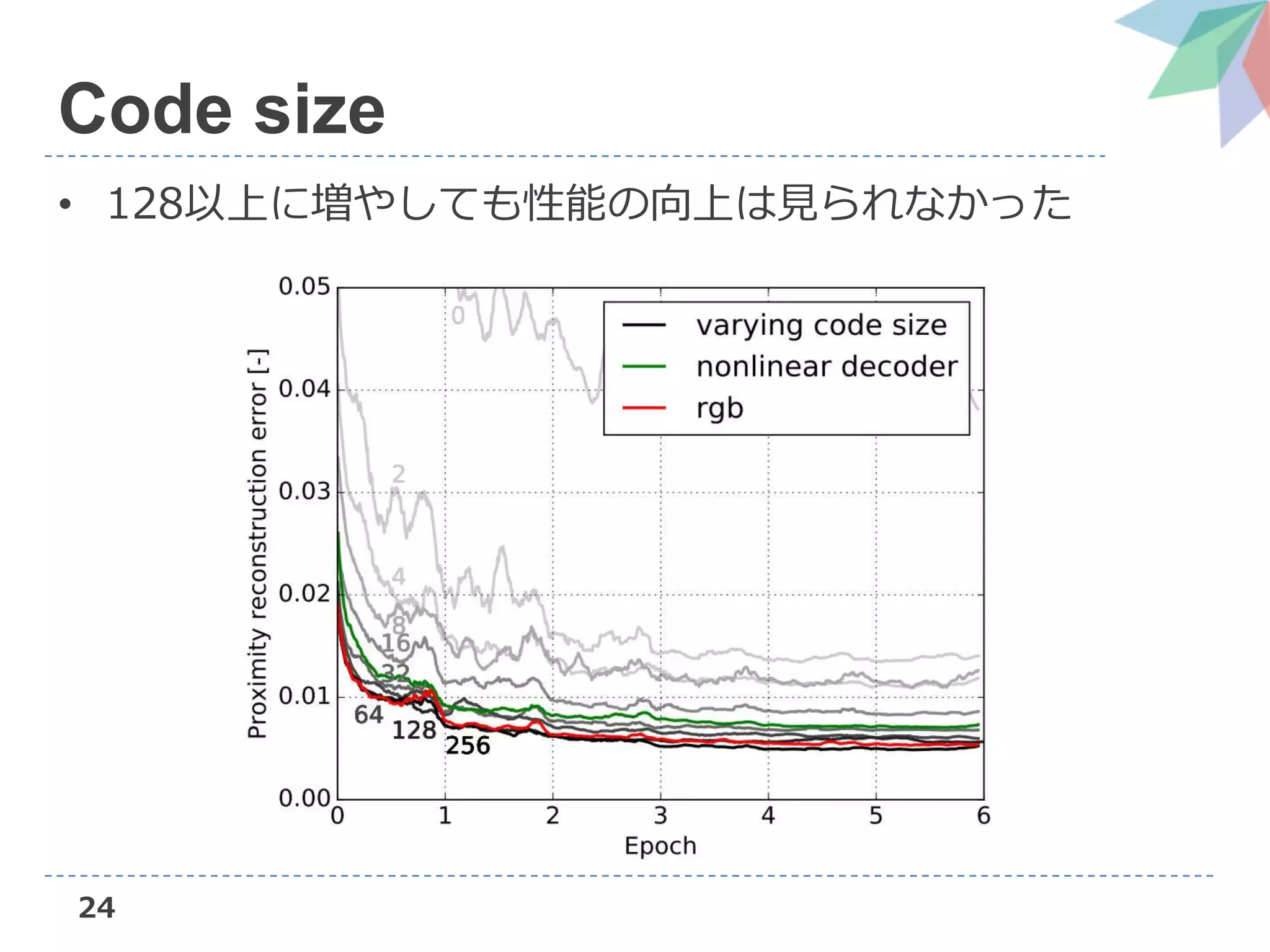
24 Code size • 128以上に増やしても性能の向上は見られなかった
26.
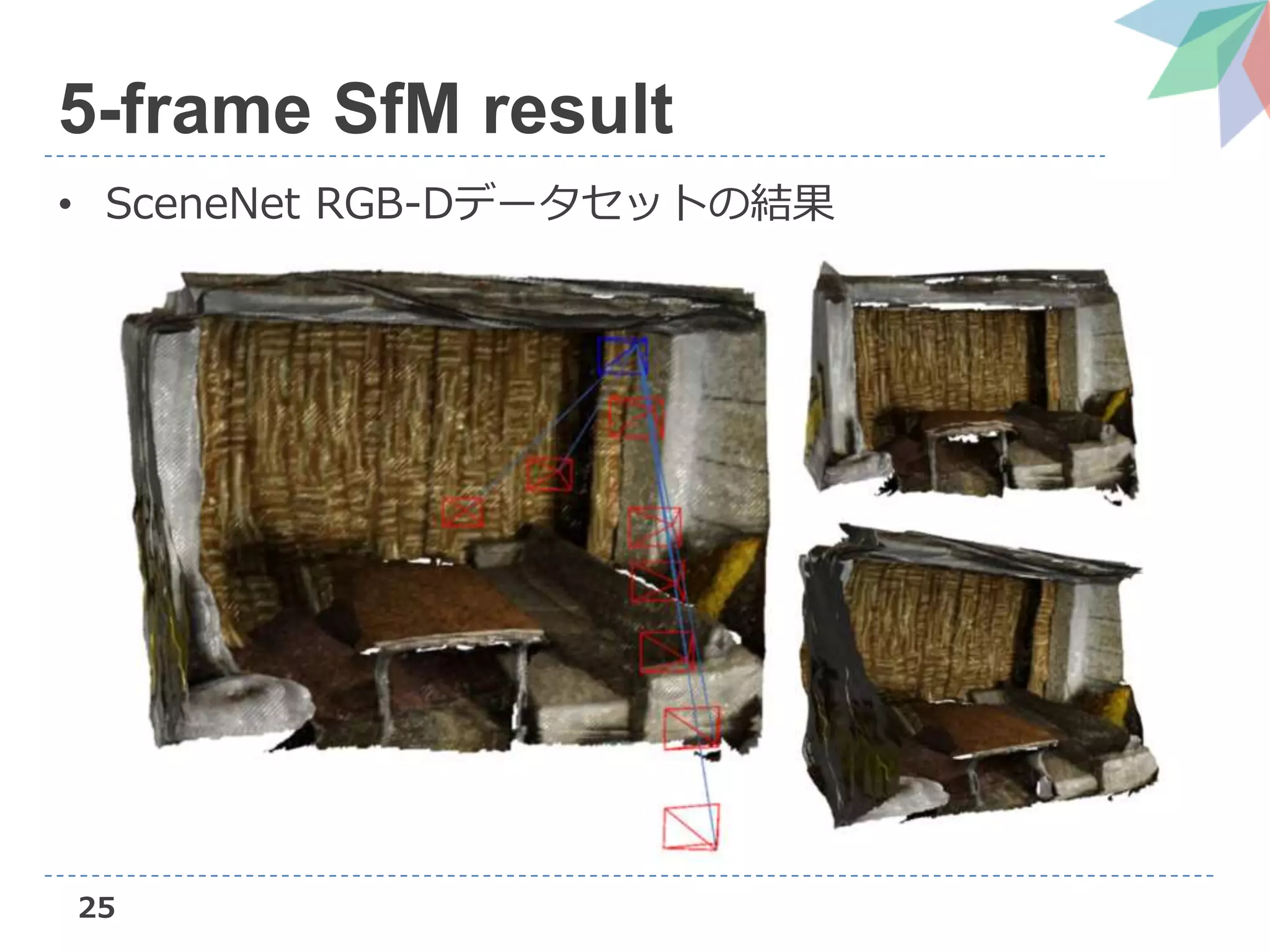
25 5-frame SfM result •
SceneNet RGB-Dデータセットの結果
27.
26 Real dataset result •
EuRoC [Burri+, IJRR16] データセット – SceneNet RGB-Dデータセットで学習したのに復元 ができている
28.
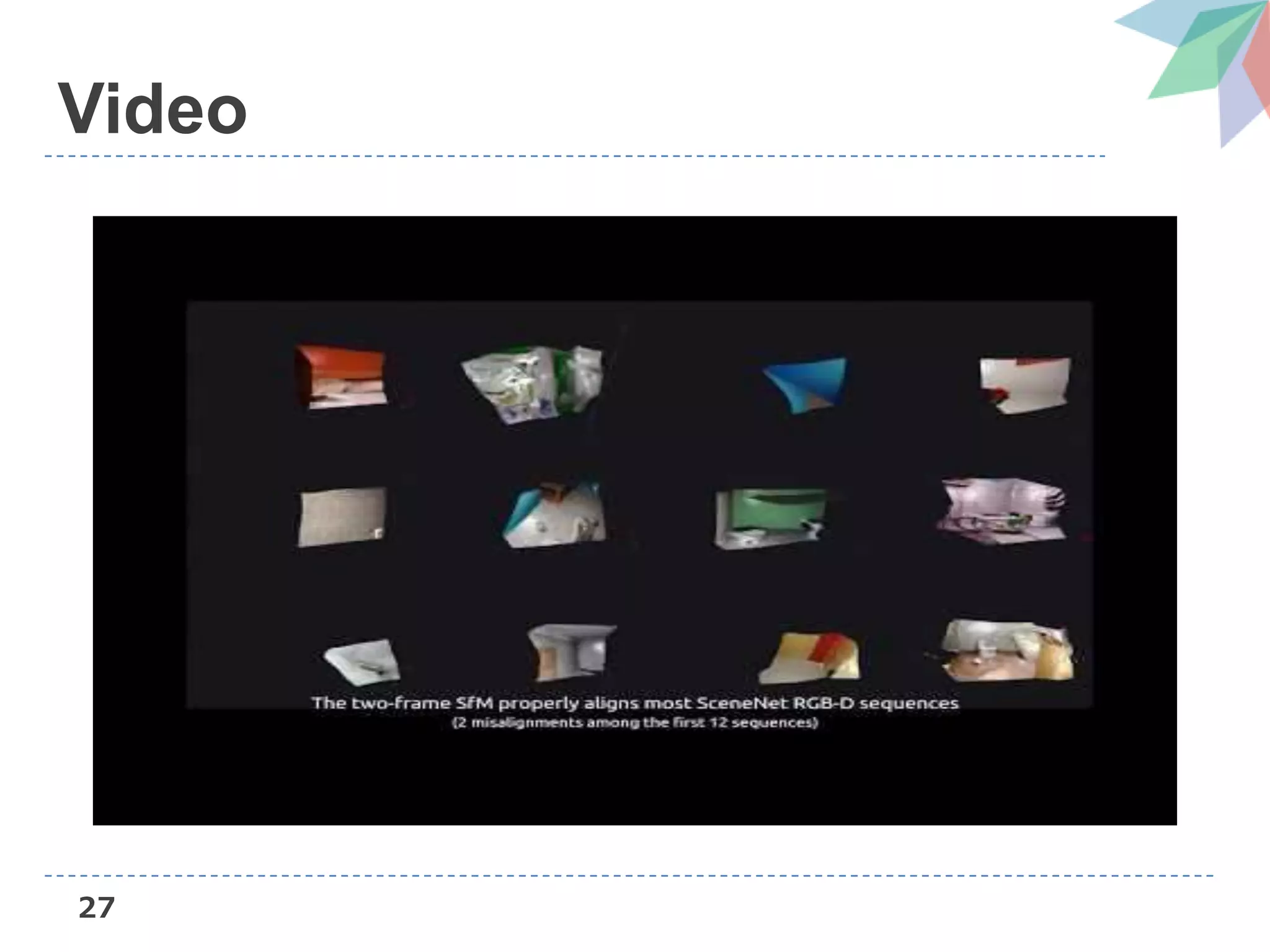
27 Video
29.
28 まとめ • 単眼画像群から密な三次元復元を効率的に行いたい • 密な奥行き画像のコンパクトな特徴量表現を抽出し, 特徴量空間で最適化する面白い手法を提案 –
既存手法との比較は全くない…(勝てなかったか?) • Feature-based vs Direct-basedだったvSLAMの新しい 形を提案することができた – (現段階では5fps程度, 今後がんばる)
Download

![1
Introduction
• Visual SLAM (Simultaneous Localization and Mapping)
– 映像からリアルタイムにカメラの軌跡を推定
(三次元地図作成:軌跡推定の手がかり)
LSD-SLAM [Engel+,2014]](https://image.slidesharecdn.com/20180712kaneko-180713152630/75/2018-CodeSLAM-2-2048.jpg)
![5
Method
• Naïveな手法
– Variational Auto-Encoderで中間特徴量を抽出
[参考 : Variational Auto-Encoder]
𝑧~𝒩(0,1)
input output
中間特徴量
(ガウス分布のパラメータ)
特徴量空間をいじれば出力も変化](https://image.slidesharecdn.com/20180712kaneko-180713152630/75/2018-CodeSLAM-6-2048.jpg)
![18
Dataset
• SceneNet RGB-D [J.McCormac+, ICCV17]
– 屋内のCGデータセット
Image Depth Instance seg Semantic seg Optical Flow](https://image.slidesharecdn.com/20180712kaneko-180713152630/75/2018-CodeSLAM-19-2048.jpg)
![26
Real dataset result
• EuRoC [Burri+, IJRR16] データセット
– SceneNet RGB-Dデータセットで学習したのに復元
ができている](https://image.slidesharecdn.com/20180712kaneko-180713152630/75/2018-CodeSLAM-27-2048.jpg)





![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)



![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]BANMo: Building Animatable 3D Neural Models from Many Casual Videos](https://cdn.slidesharecdn.com/ss_thumbnails/banmo-220225035310-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]A Higher-Dimensional Representation for Topologically Varying Neural R...](https://cdn.slidesharecdn.com/ss_thumbnails/ahigher-dimensionalrepresentationfortopologicallyvaryingneuralradiancefields1-210924021911-thumbnail.jpg?width=640&height=640&fit=bounds)



















![[DL輪読会]Differentiable Mapping Networks: Learning Structured Map Representatio...](https://cdn.slidesharecdn.com/ss_thumbnails/differentiablemappingnetworks-200707033539-thumbnail.jpg?width=640&height=640&fit=bounds)




![論文読み会@AIST (Deep Virtual Stereo Odometry [ECCV2018])](https://cdn.slidesharecdn.com/ss_thumbnails/dvsoslideshare-181104042256-thumbnail.jpg?width=640&height=640&fit=bounds)







