Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Dzul Fahmi
1,633 views
Bachelor Presentation
このプレゼンテーションは私の学部のときの卒業発表です。 元のファイルが欲しければ、メールでご連絡ください。
Education
◦
Related topics:
Image Processing Techniques
•
Read more
0
Save
Share
Embed
Embed presentation
1
/ 24
2
/ 24
3
/ 24
4
/ 24
5
/ 24
6
/ 24
7
/ 24
8
/ 24
9
/ 24
10
/ 24
11
/ 24
12
/ 24
13
/ 24
14
/ 24
15
/ 24
16
/ 24
17
/ 24
18
/ 24
19
/ 24
20
/ 24
21
/ 24
22
/ 24
23
/ 24
24
/ 24
More Related Content
PDF
論文読み会(DeMoN;CVPR2017)
by
Masaya Kaneko
PPTX
関東CV勉強会20140802(Face Alignment at 3000fps)
by
tackson5
PPTX
Structure from Motion
by
Ryutaro Yamauchi
PDF
CEDEC2015 サブディビジョンサーフェスの すべてがわかる
by
Takahito Tejima
PDF
静岡Developers勉強会コンピュータビジョンvol4発表用資料
by
keima_12
PPT
Light weightbinocular sigasia2012_face
by
ishii yasunori
PPTX
関東コンピュータビジョン勉強会
by
nonane
PDF
20101023 cvsaisentan tsubosaka
by
正志 坪坂
論文読み会(DeMoN;CVPR2017)
by
Masaya Kaneko
関東CV勉強会20140802(Face Alignment at 3000fps)
by
tackson5
Structure from Motion
by
Ryutaro Yamauchi
CEDEC2015 サブディビジョンサーフェスの すべてがわかる
by
Takahito Tejima
静岡Developers勉強会コンピュータビジョンvol4発表用資料
by
keima_12
Light weightbinocular sigasia2012_face
by
ishii yasunori
関東コンピュータビジョン勉強会
by
nonane
20101023 cvsaisentan tsubosaka
by
正志 坪坂
What's hot
PDF
Sift特徴量について
by
la_flance
PDF
20090924 姿勢推定と回転行列
by
Toru Tamaki
PPTX
CG2013 11
by
shiozawa_h
PPTX
20150328 cv関東勉強会 sumisumithパート_v1.3
by
sumisumith
PDF
Siftによる特徴点抽出
by
Masato Nakai
PPTX
CG2013 09
by
shiozawa_h
PPTX
第28回コンピュータビジョン勉強会@関東(kanejaki担当分)
by
kanejaki
PPTX
論文読み会2018 (CodeSLAM)
by
Masaya Kaneko
PPTX
20161203 cv 3_d_recon_tracking_eventcamera
by
Kyohei Unno
PPTX
日曜数学会 Ofdm
by
和人 桐ケ谷
PDF
学生科学賞2020_自律走行システムの考案
by
AkitoshiSaeki
Sift特徴量について
by
la_flance
20090924 姿勢推定と回転行列
by
Toru Tamaki
CG2013 11
by
shiozawa_h
20150328 cv関東勉強会 sumisumithパート_v1.3
by
sumisumith
Siftによる特徴点抽出
by
Masato Nakai
CG2013 09
by
shiozawa_h
第28回コンピュータビジョン勉強会@関東(kanejaki担当分)
by
kanejaki
論文読み会2018 (CodeSLAM)
by
Masaya Kaneko
20161203 cv 3_d_recon_tracking_eventcamera
by
Kyohei Unno
日曜数学会 Ofdm
by
和人 桐ケ谷
学生科学賞2020_自律走行システムの考案
by
AkitoshiSaeki
Similar to Bachelor Presentation
PPTX
RAPiD
by
harmonylab
PDF
SSII2018TS: 3D物体検出とロボットビジョンへの応用
by
SSII
PDF
ICCV2011 report
by
Hironobu Fujiyoshi
PDF
CVPR2019読み会 "A Theory of Fermat Paths for Non-Line-of-Sight Shape Reconstruc...
by
Hajime Mihara
PPT
3D cybercode wiss1996
by
Jun Rekimoto
PDF
Learning to Solve Hard Minimal Problems
by
Takuya Minagawa
PDF
画像からの倍率色収差の自動推定補正
by
doboncho
PPT
lsh
by
Shunsuke Aihara
PPTX
Miyoshi Bachelor Thesis
by
pflab
PDF
データマイニング勉強会3
by
Yohei Sato
PPTX
Direct Sparse Odometryの解説
by
Masaya Kaneko
PDF
Cvpr2011 reading-tsubosaka
by
正志 坪坂
PDF
静岡Developers勉強会コンピュータビジョンvol2
by
niku9Tenhou
PDF
Fusion4dIntroduction
by
Hideki Iwasawa
PPTX
CG2013 06
by
shiozawa_h
PDF
点群深層学習 Meta-study
by
Naoya Chiba
PDF
【DLゼミ】XFeat: Accelerated Features for Lightweight Image Matching
by
harmonylab
PDF
画像認識における幾何学的不変性の扱い
by
Seiji Hotta
PDF
20110625 cv 3_3_5(shirasy)
by
Yoichi Shirasawa
PDF
Deformable Part Modelとその発展
by
Takao Yamanaka
RAPiD
by
harmonylab
SSII2018TS: 3D物体検出とロボットビジョンへの応用
by
SSII
ICCV2011 report
by
Hironobu Fujiyoshi
CVPR2019読み会 "A Theory of Fermat Paths for Non-Line-of-Sight Shape Reconstruc...
by
Hajime Mihara
3D cybercode wiss1996
by
Jun Rekimoto
Learning to Solve Hard Minimal Problems
by
Takuya Minagawa
画像からの倍率色収差の自動推定補正
by
doboncho
lsh
by
Shunsuke Aihara
Miyoshi Bachelor Thesis
by
pflab
データマイニング勉強会3
by
Yohei Sato
Direct Sparse Odometryの解説
by
Masaya Kaneko
Cvpr2011 reading-tsubosaka
by
正志 坪坂
静岡Developers勉強会コンピュータビジョンvol2
by
niku9Tenhou
Fusion4dIntroduction
by
Hideki Iwasawa
CG2013 06
by
shiozawa_h
点群深層学習 Meta-study
by
Naoya Chiba
【DLゼミ】XFeat: Accelerated Features for Lightweight Image Matching
by
harmonylab
画像認識における幾何学的不変性の扱い
by
Seiji Hotta
20110625 cv 3_3_5(shirasy)
by
Yoichi Shirasawa
Deformable Part Modelとその発展
by
Takao Yamanaka
More from Dzul Fahmi
PDF
Cerita pengalaman kuliah dan karier di negeri sakura jepang
by
Dzul Fahmi
PPTX
ICPR_IWCF2012_License Plate Reading from a Low Resolution Image
by
Dzul Fahmi
PPT
Ukhuwah islamiyah
by
Dzul Fahmi
PPTX
最近のインドネシア事情と日本観について
by
Dzul Fahmi
PPTX
インドネシアの地域事情と日本観について
by
Dzul Fahmi
PPT
インターンシップ成果発表会
by
Dzul Fahmi
Cerita pengalaman kuliah dan karier di negeri sakura jepang
by
Dzul Fahmi
ICPR_IWCF2012_License Plate Reading from a Low Resolution Image
by
Dzul Fahmi
Ukhuwah islamiyah
by
Dzul Fahmi
最近のインドネシア事情と日本観について
by
Dzul Fahmi
インドネシアの地域事情と日本観について
by
Dzul Fahmi
インターンシップ成果発表会
by
Dzul Fahmi
Bachelor Presentation
1.
平成22年度
卒業発表会 群馬大学工学部情報工学科 太田研究室 4年 DZULFAHMI
2.
研究の背景 つくばチャレンジ2010 研究の目的 多角形認識のアルゴリズム 各処理の詳細 実験・結果 まとめ
3.
近年、ロボットの存在が一般社会の中 でも 人間とロボットの共存
4.
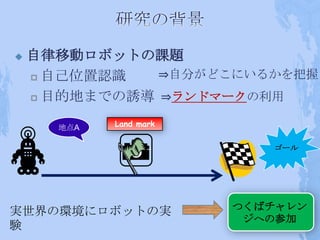
自律移動ロボットの課題 自己位置認識 ⇒自分がどこにいるかを把握 目的地までの誘導 ⇒ランドマークの利用 地点A Land mark ゴール 実世界の環境にロボットの実 つくばチャレン ジへの参加 験
5.
人とロボット
が 共存する 社会へ 「安全」かつ 「確実」に動 く FINISH START つくば市 中央公園1.1km
6.
非常停止 カメ
ラ パソコン エンコー ダ 制御 LRF カメラを利用し、実験を行う: • 多角形認識の処理 • 風景マッチングによる自己位置推 定 • Hough 変換を用いた進行方向算出
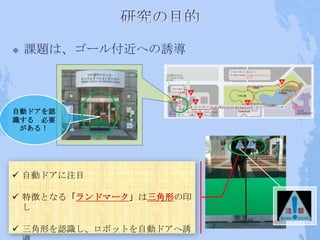
7.
課題は、ゴール付近への誘導 自動ドアを認 識する 必要 がある! 自動ドアに注目 特徴となる「ランドマーク」は三角形の印 し 三角形を認識し、ロボットを自動ドアへ誘
8.
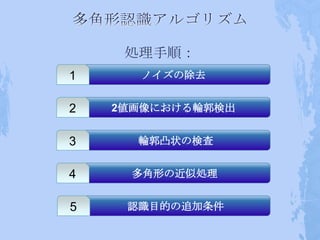
処理手順: 1
ノイズの除去 2 2値画像における輪郭検出 3 輪郭凸状の検査 4 多角形の近似処理 5 認識目的の追加条件
9.
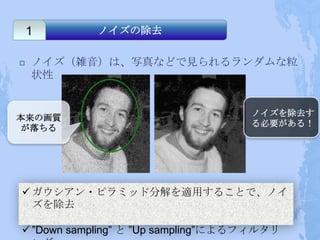
1
ノイズの除去 ノイズ(雑音)は、写真などで見られるランダムな粒 状性 ノイズを除去す 本来の画質 る必要がある! が落ちる ガウシアン・ピラミッド分解を適用することで、ノイ ズを除去 ”Down sampling” と ”Up sampling”によるフィルタリ
10.
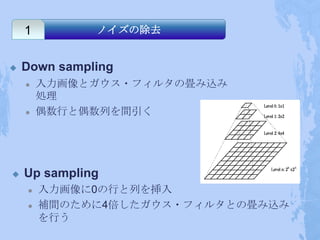
1
ノイズの除去 Down sampling 入力画像とガウス・フィルタの畳み込み 処理 偶数行と偶数列を間引く Up sampling 入力画像に0の行と列を挿入 補間のために4倍したガウス・フィルタとの畳み込み を行う
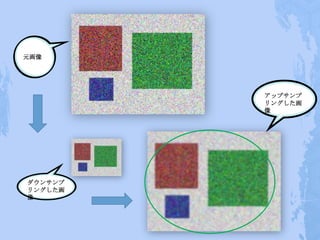
11.
元画像
アップサンプ リングした画 像 ダウンサンプ リングした画 像
12.
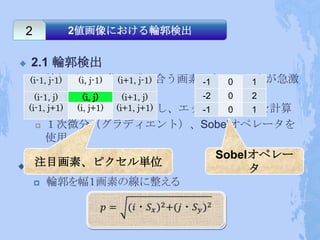
2
2値画像における輪郭検出 2.1 輪郭検出 (i-1,輪郭(エッジ)⇒隣り合う画素の色・明るさが急激 j-1) (i, j-1) (i+1, j-1) -1 0 1 に変化している部分 (i-1, j) (i, j) (i+1, j) -2 0 2 (i-1,グレイスケールに変換し、エッジの強度(p)を計算 j+1) (i, j+1) (i+1, j+1) -1 0 1 1次微分(グラディエント)、Sobelオペレータを 使用 Sobelオペレー 注目画素、ピクセル単位 タ
13.
2
2値画像における輪郭検出 元画像 輪郭検出 細線化
14.
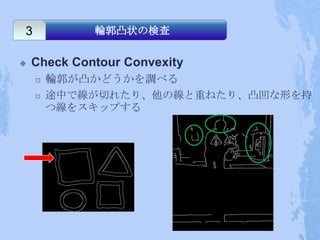
3
輪郭凸状の検査 Check Contour Convexity 輪郭が凸かどうかを調べる 途中で線が切れたり、他の線と重ねたり、凸凹な形を持 つ線をスキップする
15.
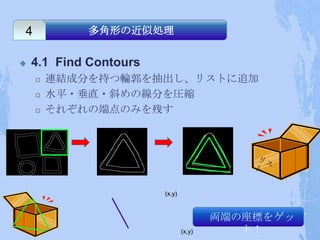
4
多角形の近似処理 4.1 Find Contours 連結成分を持つ輪郭を抽出し、リストに追加 水平・垂直・斜めの線分を圧縮 それぞれの端点のみを残す (x,y) 両端の座標をゲッ (x,y) ト!
16.
4
多角形の近似処理 4.2 ApproxPoly 近似処理⇒Douglas-Peuckerアルゴリズム (線のセグメンテーシ ョン) 近似曲線から一定距離内に元の多角形を構成する点 が全ておさまった場合にアルゴリズムが終了 最終的な近似曲線が決定 三角形に 近似し た! Douglas-Peucker アルゴリズム [2]今井拓也(2006), 動的に描画点数を考慮した非同期数値地図表示システムの設 計と実装, 島根大学 総合理工学部 数理・情報システム学科 卒業論
17.
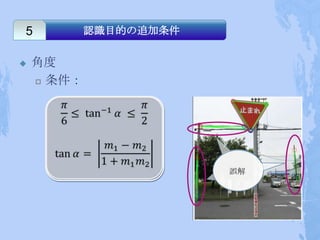
5
認識目的の追加条件 角度 条件: 誤解
18.
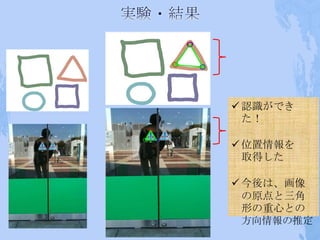
認識ができ
た! 位置情報を 取得した 今後は、画像 の原点と三角 形の重心との 方向情報の推定
19.
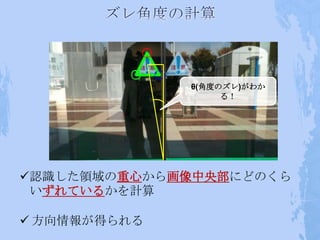
θ(角度のズレ)がわか
る! 認識した領域の重心から画像中央部にどのくら いずれているかを計算 方向情報が得られる
20.
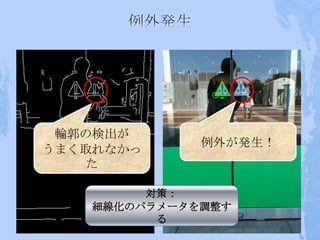
輪郭の検出が
例外が発生! うまく取れなかっ た 対策: 細線化のパラメータを調整す る
21.
認識
認識
22.
認識
認識 認識 認識
23.
まとめ 画像内にある物体の輪郭と認識目的の形状 (三角 形)との類似度がマッチングしたことを確認した 。 今後の課題 誤認識への対応 画質が低い画像における認識精度の向上 来年度のつくばチャレンジで実用化するために 、多くの走行実験をこなす
24.
ご清聴ありがとうございま した




![4 多角形の近似処理
4.2 ApproxPoly
近似処理⇒Douglas-Peuckerアルゴリズム (線のセグメンテーシ
ョン)
近似曲線から一定距離内に元の多角形を構成する点
が全ておさまった場合にアルゴリズムが終了
最終的な近似曲線が決定
三角形に
近似し
た!
Douglas-Peucker
アルゴリズム
[2]今井拓也(2006), 動的に描画点数を考慮した非同期数値地図表示システムの設
計と実装, 島根大学 総合理工学部 数理・情報システム学科 卒業論](https://image.slidesharecdn.com/fahmib4presentationslideshare-111102051139-phpapp02/85/Bachelor-Presentation-16-320.jpg)