Downloaded 101 times

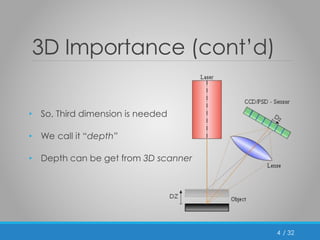










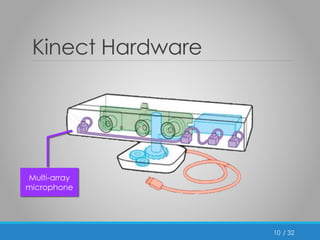
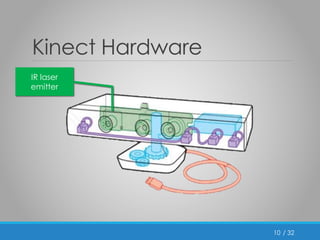
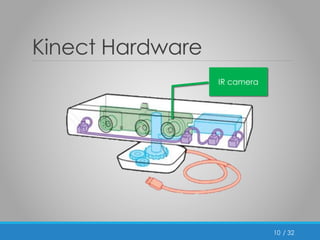
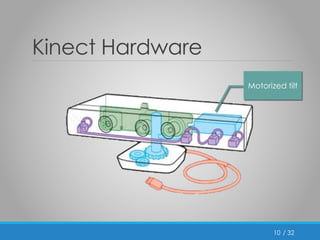
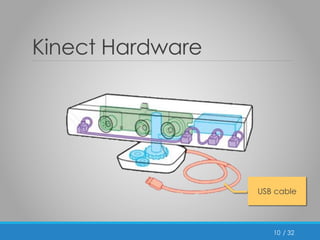
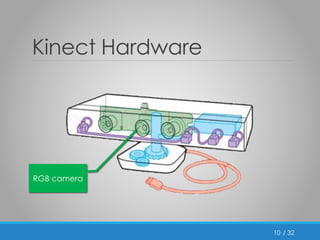


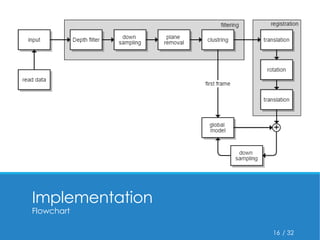
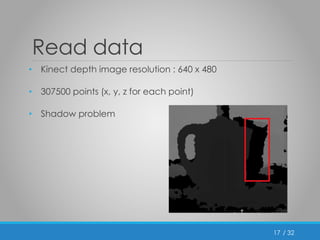
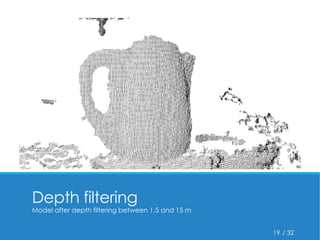

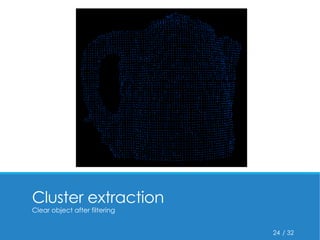
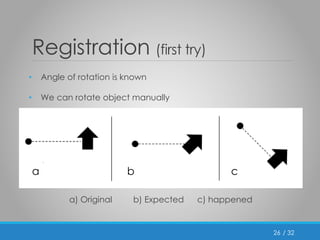
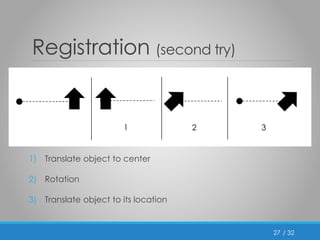
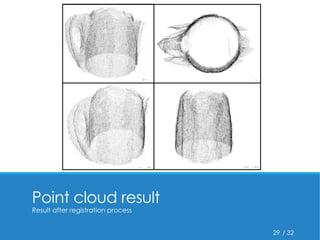


This document discusses using the Kinect for 3D scanning. It begins with an introduction to 3D scanning and its importance. It then discusses the Kinect hardware and software tools used, including Point Cloud Library (PCL) and drivers. The implementation section explains the process of reading depth data, filtering, downsampling, plane removal, registration and outputting the final point cloud. Key steps include depth filtering, downsampling, plane removal, registration of multiple scans and using Geomagic software for refinement. The Kinect is used to capture 3D data which is then processed using PCL for applications such as animation, games and industrial use.























































































