Download as PDF, PPTX





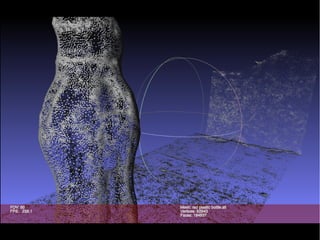

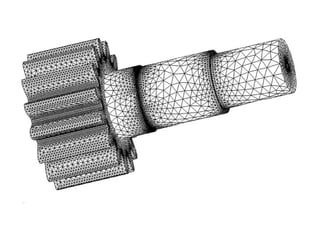


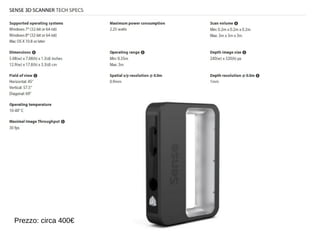




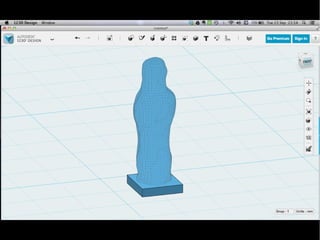



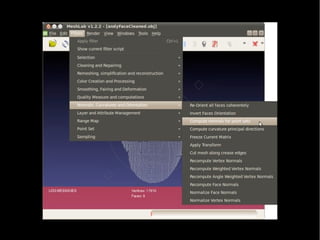
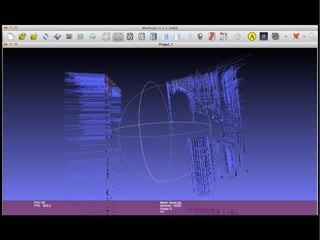
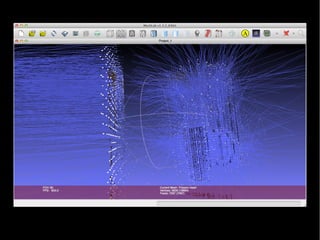
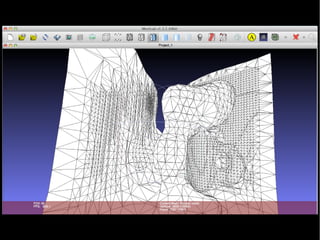
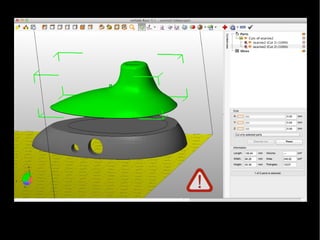
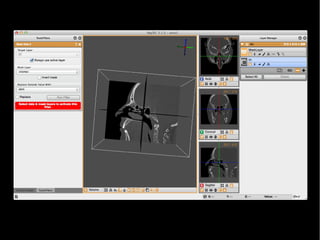





Il documento esplora la tecnologia degli scanner 3D, evidenziando la loro storia, principi di funzionamento e applicazioni in vari settori come medicina, architettura e design. Viene discusso il processo di raccolta dati tramite nuvole di punti e le differenti tecniche ottiche utilizzate. Inoltre, vengono presentati esempi di scanner commerciali e low-cost, insieme a software per la gestione dei dati 3D.





























![[#CaseStudy] Quel giorno in cui sono diventato @ilWinnerTaco su Twitter](https://cdn.slidesharecdn.com/ss_thumbnails/ilwinnertaco-twitter-150318043649-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)

































![Object printing for dummies [veneziacamp format]](https://cdn.slidesharecdn.com/ss_thumbnails/3dprinterfordummies-120410152843-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)






















