Download to read offline
![Faculty of Engineering and Material
Science
Mechatronics Department
The German University in Cairo
Khaled H. Emam 10
Introduction
Kinect
sensor
Image
processing
Methodology &
matlab code
Results and
conclusion
Future work &
recommendations
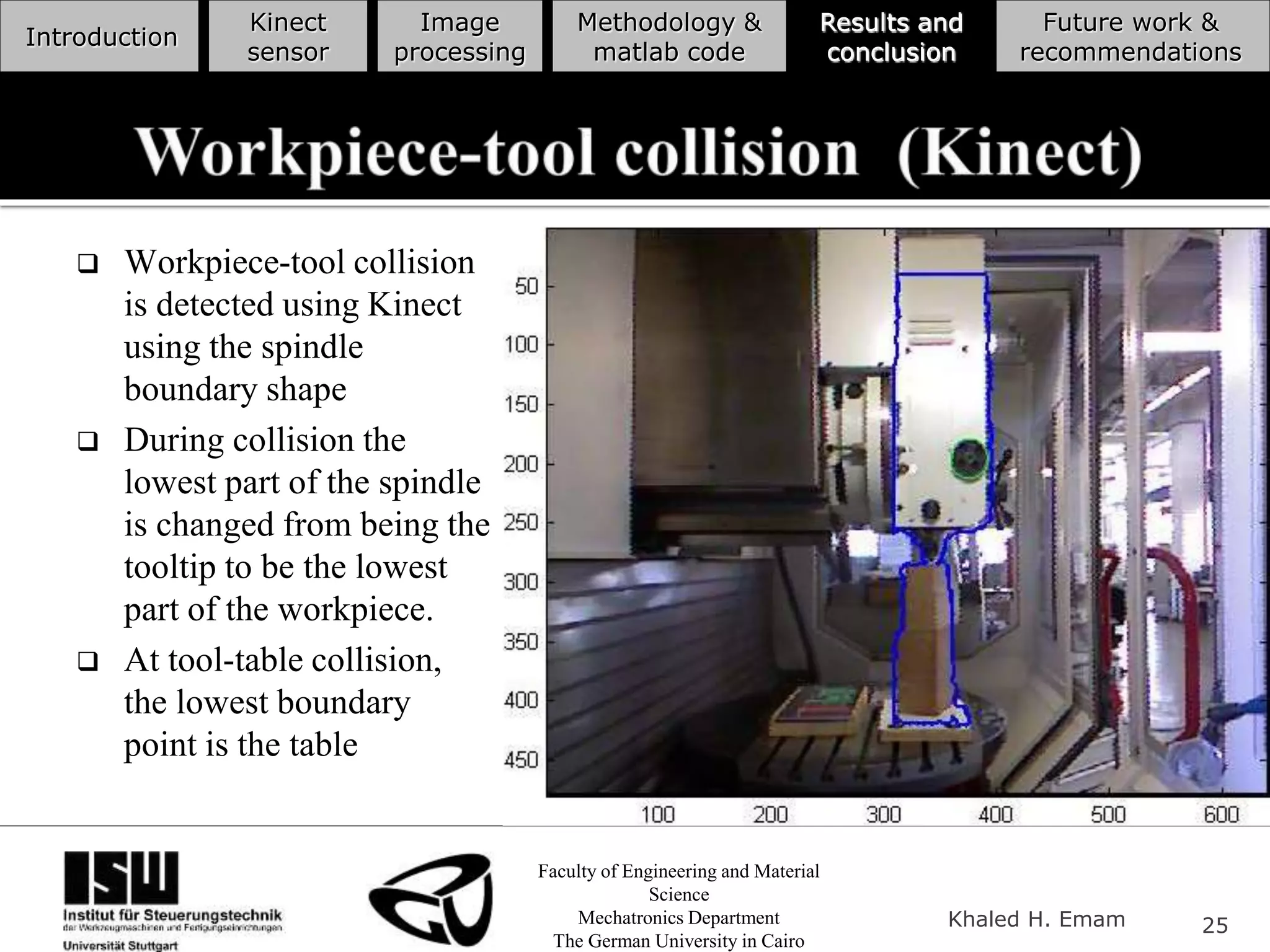
Converting from u[pixels],v[pixels],Z[mm] coordinates to
X[mm],Y[mm],Z[mm] Cartesian coordinates
Segmentation of objects using depth map](https://image.slidesharecdn.com/15e709f0-d40f-4f53-a644-e3ed060d9494-160216095540/75/Presentation2-10-2048.jpg)
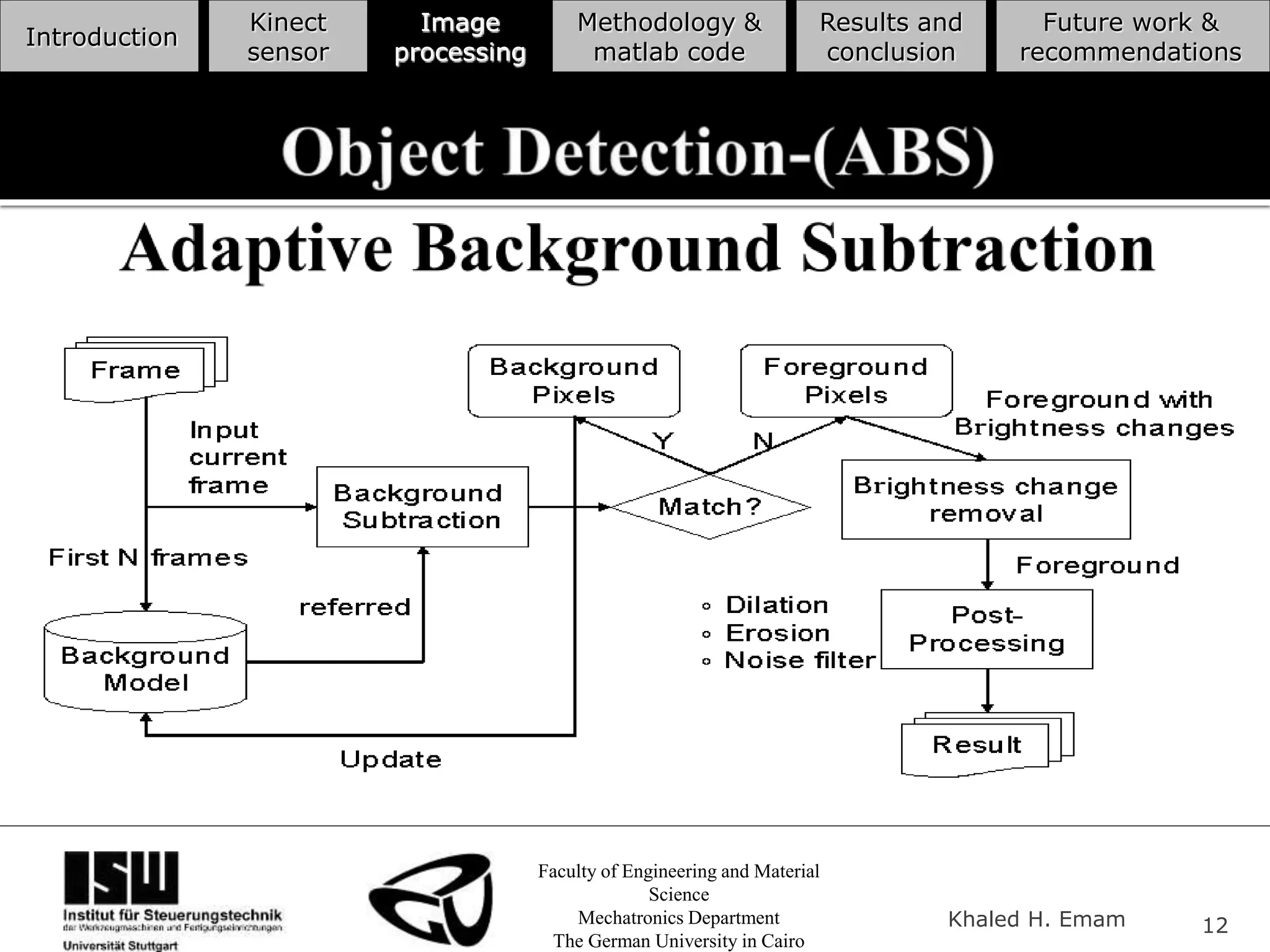
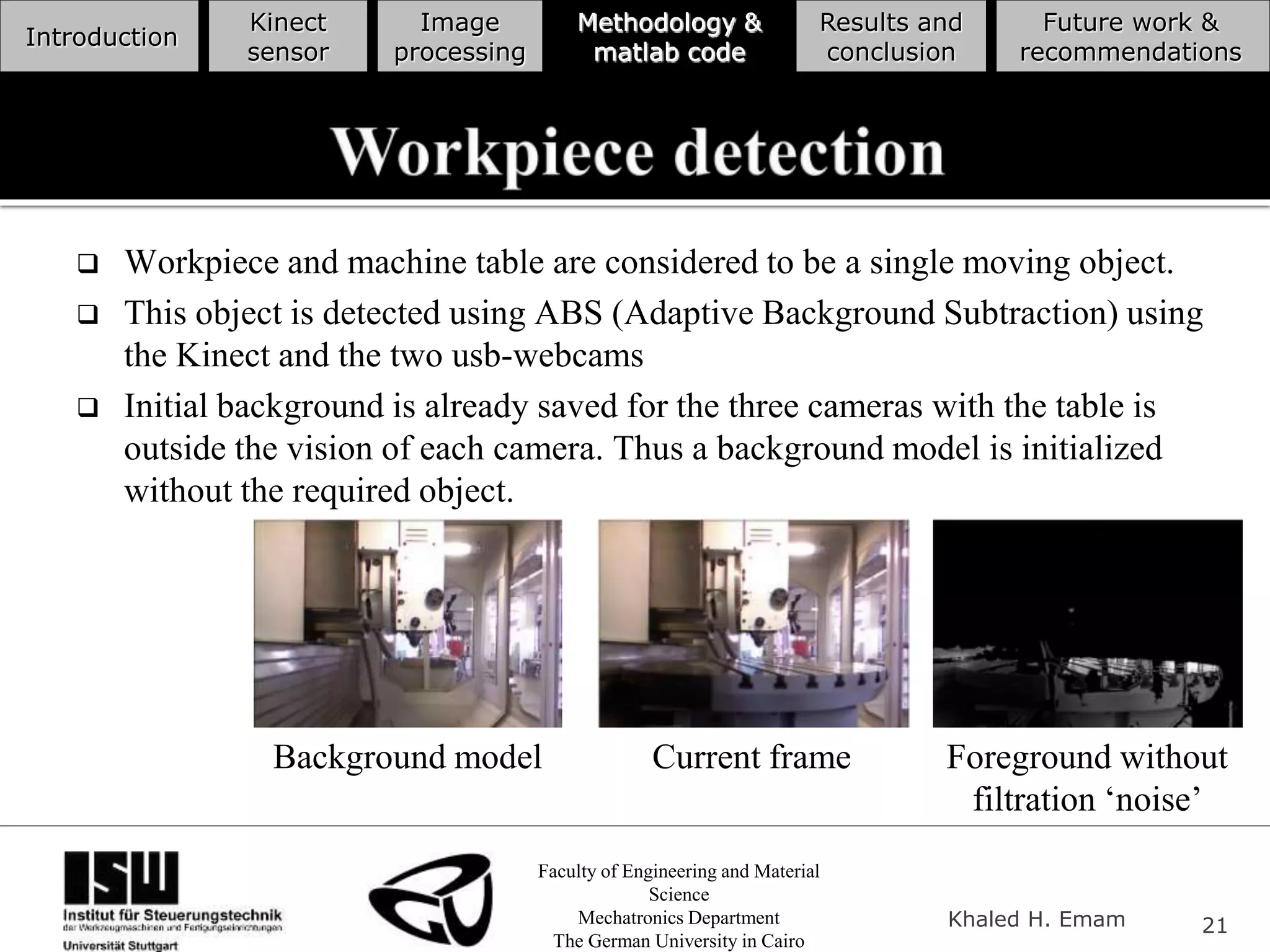
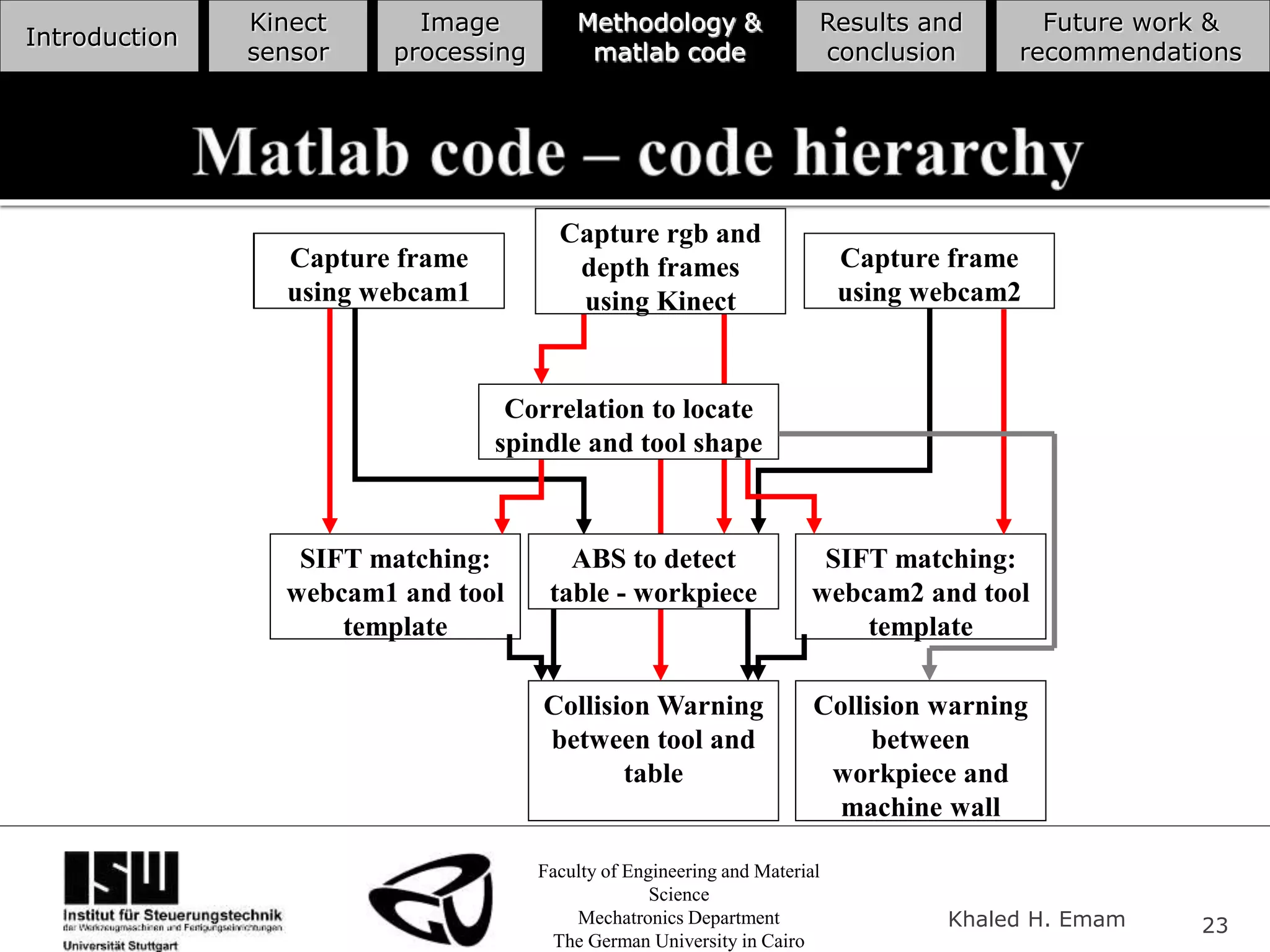
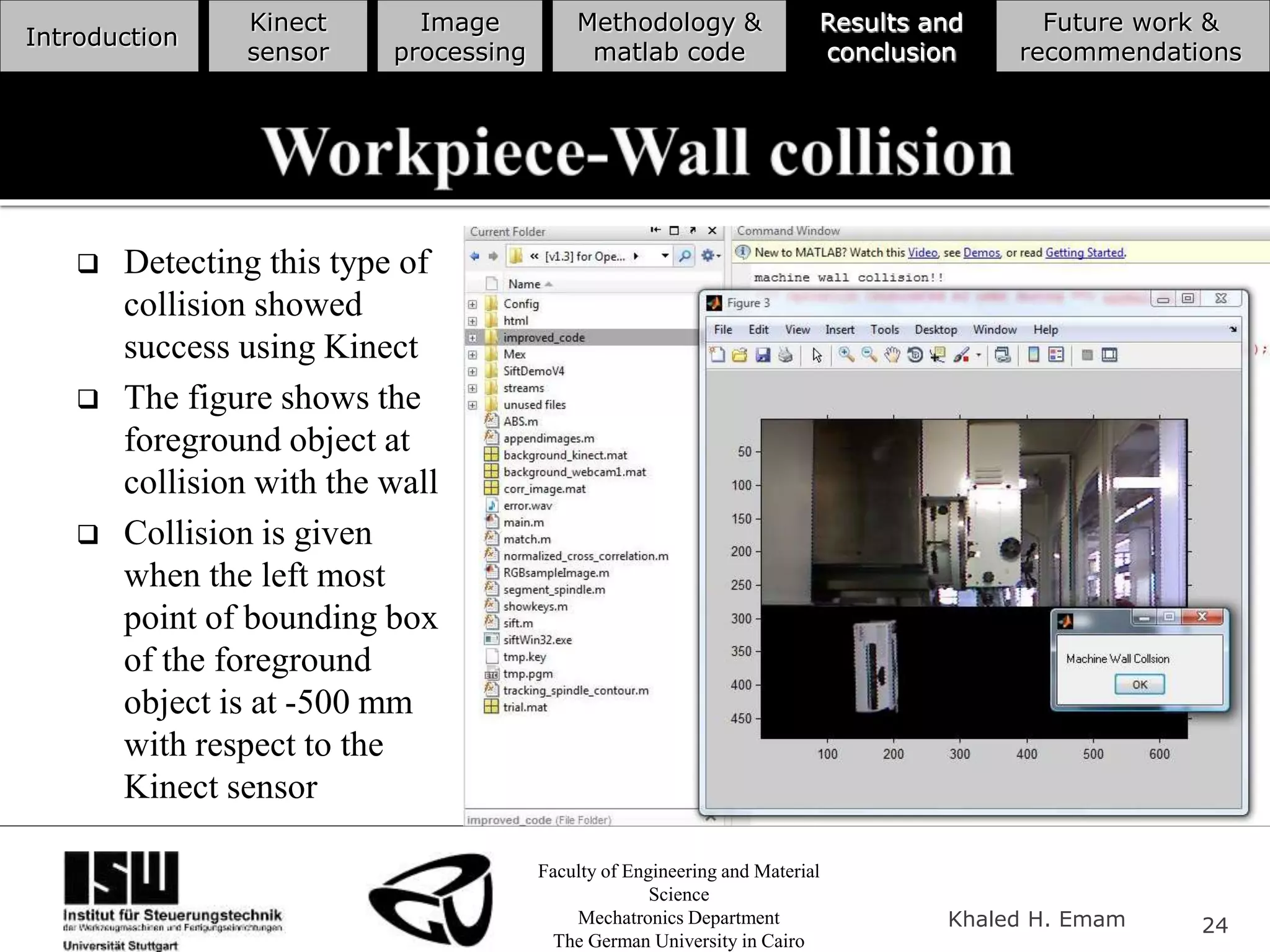

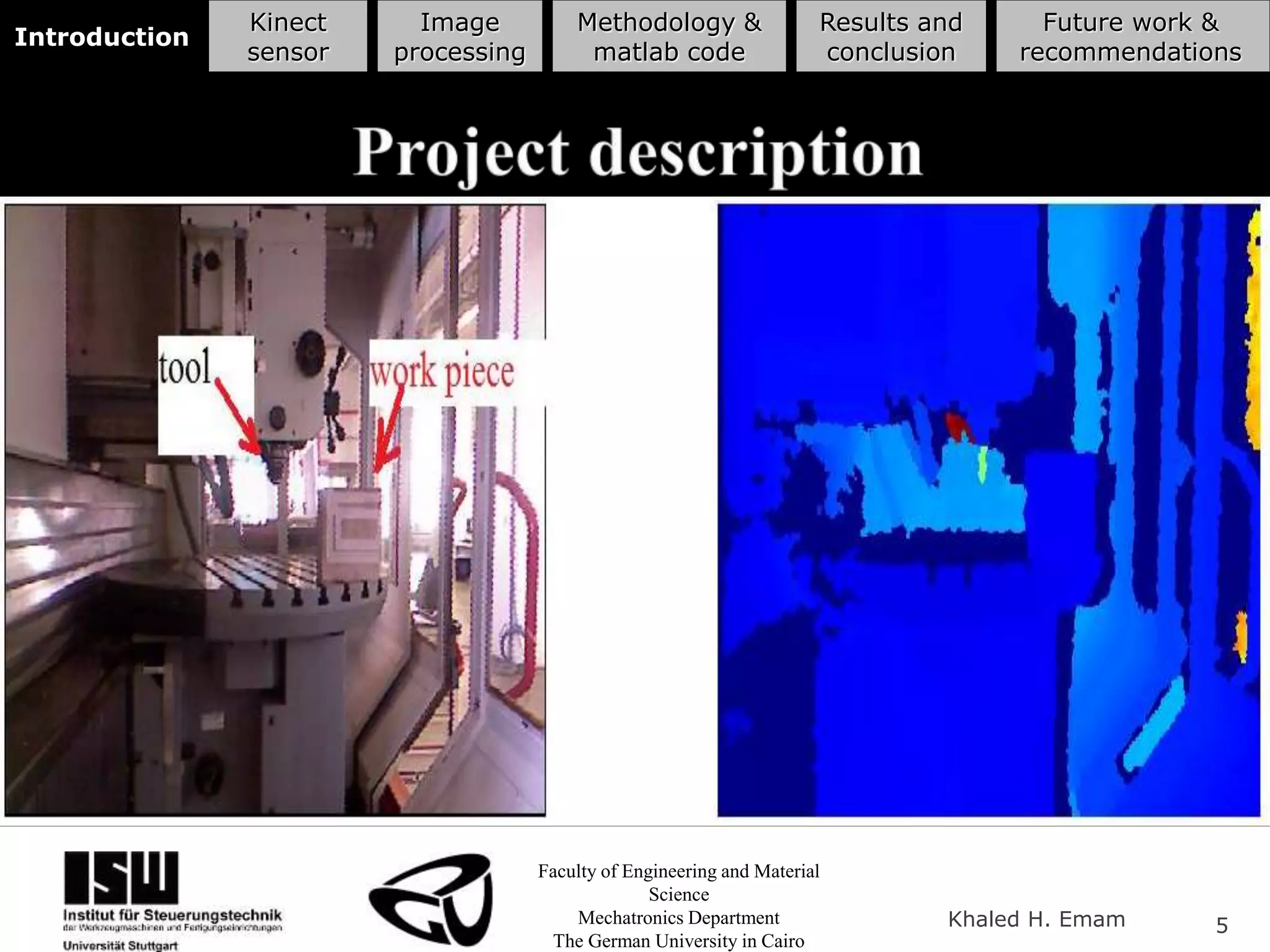
This document discusses collision avoidance in CNC machines using multiple sensors. It proposes detecting collisions between the cutting tool and workpiece using a Kinect sensor and two webcams through image processing techniques in MATLAB. The methodology involves extracting depth maps from Kinect to detect the spindle and workpiece, and using SIFT and normalized cross-correlation on webcam images to detect the cutting tool. Adaptive background subtraction will be used to isolate foreground objects. Detected objects across sensors will be fused to determine if a collision has occurred.